TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025180460
公報種別
公開特許公報(A)
公開日
2025-12-11
出願番号
2024087814
出願日
2024-05-30
発明の名称
車両制御装置
出願人
マツダ株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/08 20120101AFI20251204BHJP(車両一般)
要約
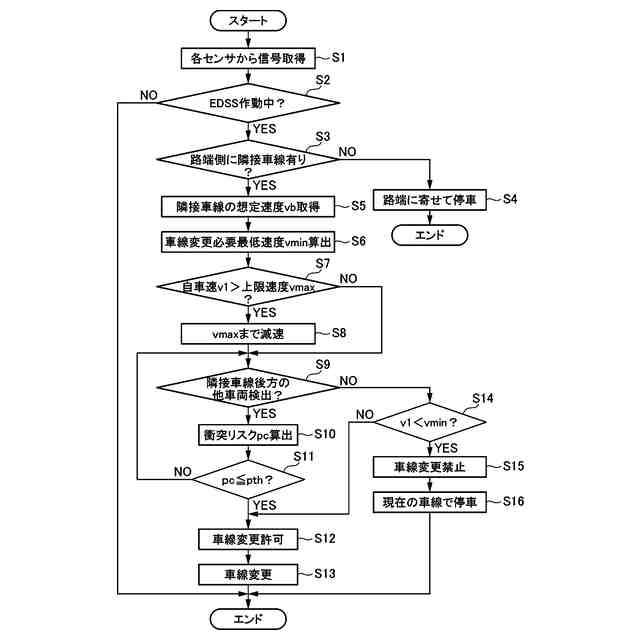
【課題】ドライバの異常発生時に車両をより安全に停止させることができる車両制御装置を提供する。
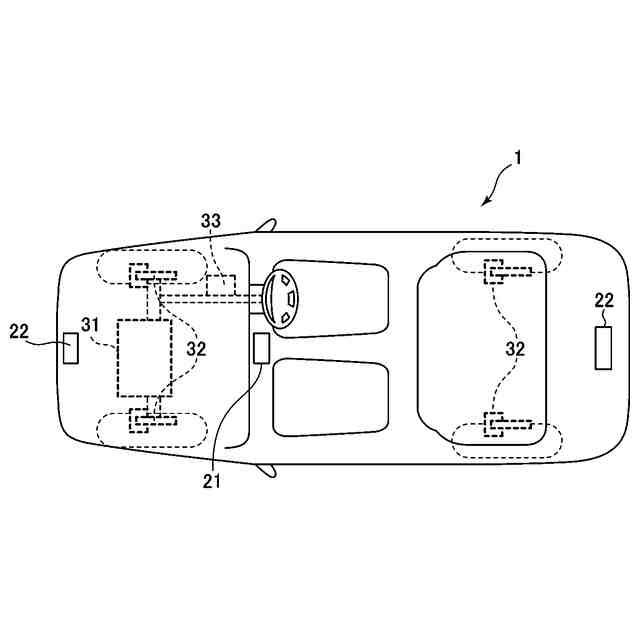
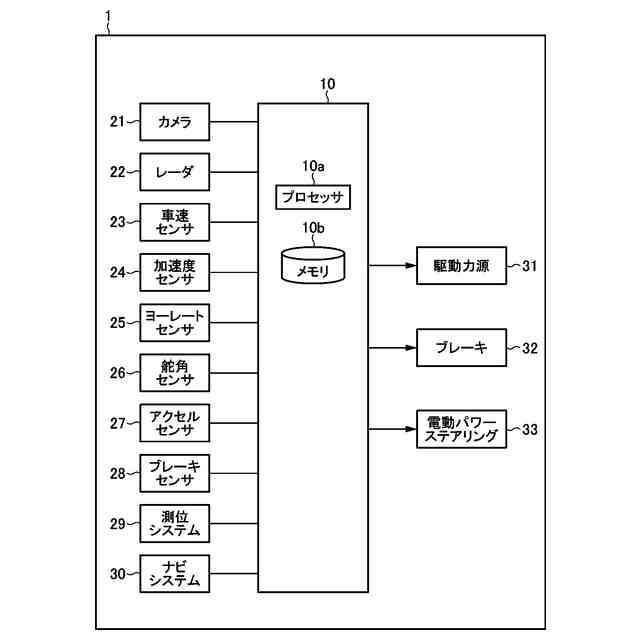
【解決手段】車両制御装置は、車両(1)の後方を含む周辺の他車両を検出するレーダ(22)と、車両が走行している車線よりも路端側に隣接車線が存在する場合、車両を隣接車線に車線変更させるように、車両の駆動力源(31)、電動パワーステアリング(33)及び/又はブレーキ(32)を制御可能に構成されたコントローラ(10)とを有し、コントローラは、隣接車線を走行する他車両の想定速度を取得し、想定速度と周辺センサの最大検出距離とに基づき、隣接車線において車両から最大検出距離以上後方を想定速度で走行している他車両が所定の減速度で車両の車線変更時の速度まで減速した時に、他車両が車両から最小車間距離以上後方であるための、車両の車線変更時の必要最低速度を算出し、車両の速度が必要最低速度未満である場合、隣接車線への車両の車線変更を禁止する。
【選択図】図3
特許請求の範囲
【請求項1】
車両のドライバに異常が発生した場合に前記車両を路端に寄せて停車させる車両制御装置であって、
前記車両の後方を含む周辺の他車両を検出する周辺センサと、
前記車両が走行している車線よりも前記路端側に隣接車線が存在する場合、前記車両を前記隣接車線に車線変更させるように、前記車両の駆動力源、操舵装置及び/又は制動装置を制御可能に構成されたコントローラと、
を有し、
前記コントローラは、
前記隣接車線を走行する他車両の想定速度を取得し、
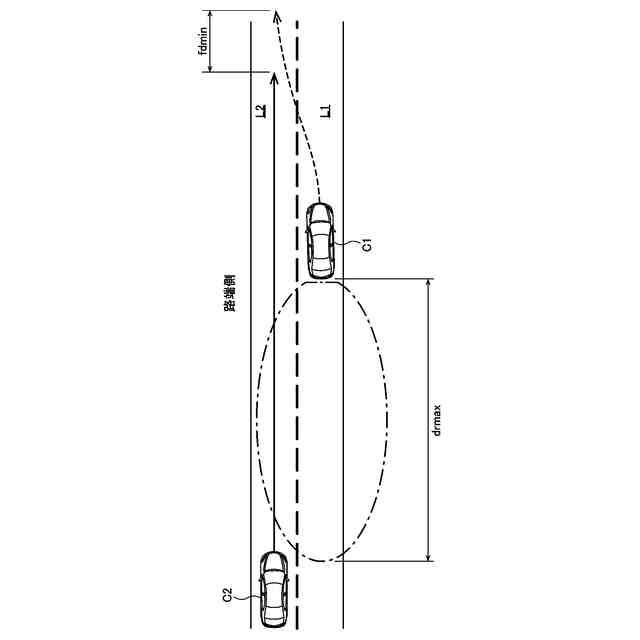
前記想定速度と前記周辺センサの最大検出距離とに基づき、前記隣接車線において前記車両から前記最大検出距離以上後方を前記想定速度で走行している他車両が、所定の減速度で前記車両の車線変更時の速度まで減速した時に、前記他車両が前記車両から最小車間距離以上後方であるための、前記車両の車線変更時の必要最低速度を算出し、
前記車両の速度が前記必要最低速度未満である場合、前記隣接車線への前記車両の車線変更を禁止する、
ように構成されている、
車両制御装置。
続きを表示(約 680 文字)
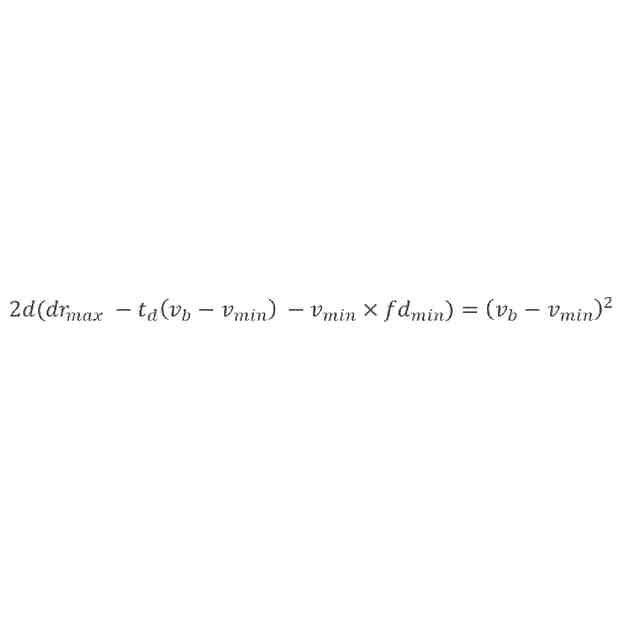
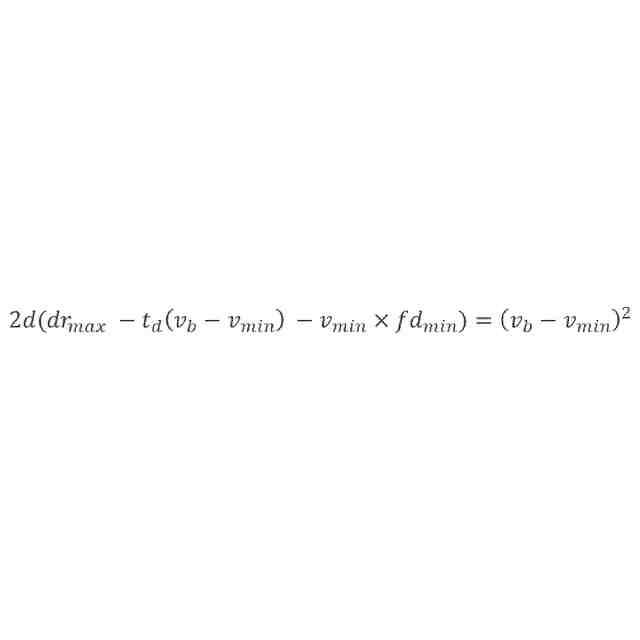
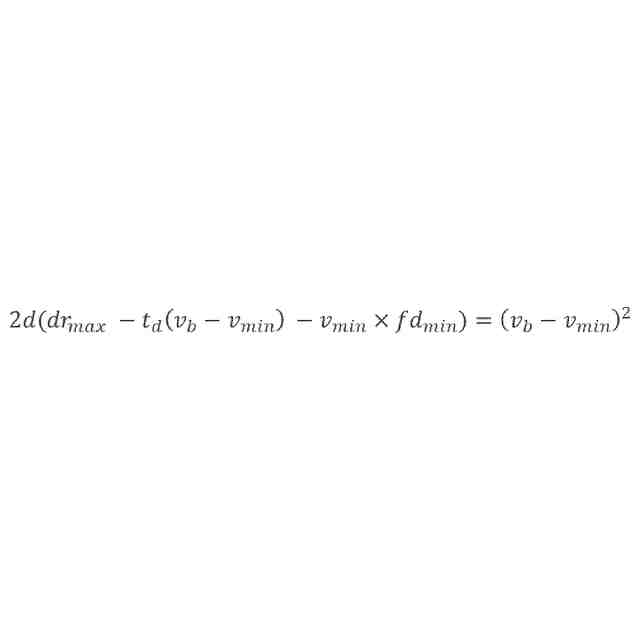
【請求項2】
前記コントローラは、前記想定速度をv
b
、前記最大検出距離をdr
max
、前記所定の減速度をd、前記最小車間距離をfd
min
、前記車両が車線変更を開始した時から前記他車両が減速を開始するまでの遅れ時間をt
d
、前記必要最低速度をv
min
とした場合に、下記式から前記必要最低速度v
min
を算出するように構成されている、
TIFF
2025180460000004.tif
14
170
請求項1に記載の車両制御装置。
【請求項3】
前記コントローラは、前記周辺センサにより検出された前記隣接車線を走行している他車両の速度に基づき、前記想定速度を取得するように構成されている、請求項1又は2に記載の車両制御装置。
【請求項4】
前記コントローラは、前記隣接車線への前記車両の車線変更を禁止した場合、前記車両の駆動力源、操舵装置及び/又は制動装置により前記車両を現在走行している車線において停止させるように構成されている、請求項1又は2に記載の車両制御装置。
【請求項5】
前記コントローラは、前記ドライバに異常が発生した場合において、前記車両の速度が所定の上限速度より高い場合、前記車両の駆動力源、操舵装置及び/又は制動装置により前記車両の速度を前記上限速度まで減速させるように構成されている、請求項1又は2に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
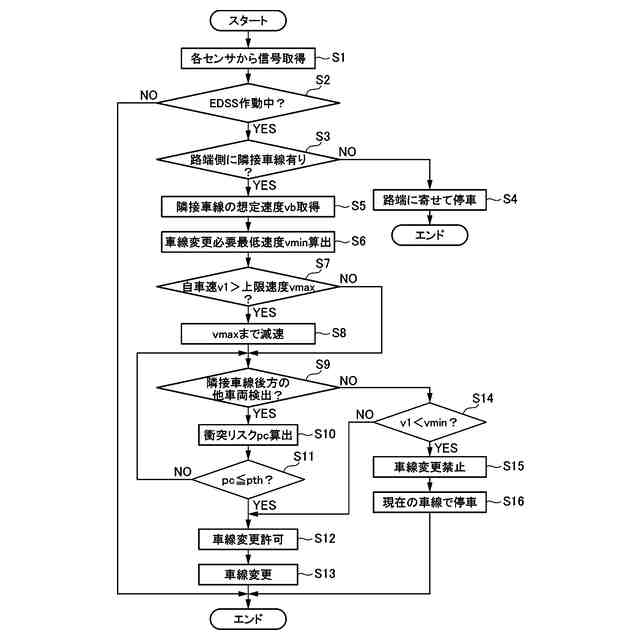
近年、ドライバが安全に運転できない状態に陥った場合に異常を検知し車両を自動的に停止させるドライバ異常時対応システム(EDSS)の開発が進められている。例えば、ドライバの姿勢の崩れを検出することによりドライバの異常を検知した場合に、車線を維持しながら徐々に車両を減速させ、可能な場合には路肩等に車両を寄せて自動停止させること等が検討されている(特許文献1及び非特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2008-37218号公報
【非特許文献】
【0004】
国土交通省自動車局 先進安全自動車推進検討会、「ドライバー異常時対応システム(路肩退避型)基本設計書」、2018年3月
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したようなドライバ異常時対応システムでは、車両が走行している車線が路肩等に隣接していない場合、現在の車線から路肩側の隣接車線へ車両を車線変更させることも検討されている。この場合、車線変更先の車線を走行している周辺他車両との衝突等の事故を回避するため、レーダ等のセンサにより、車線変更先の隣接車線において自車両と衝突する可能性のある他車両が検出された場合には、隣接車線への車線変更は行われない。
【0006】
しかしながら、車線変更先の隣接車線においてセンサの最大検出距離よりも後方から他車両が接近している場合には、その他車両はセンサによって検出されないので、車線変更が実行され得る。この場合、他車両と自車両との速度差が大きいと、衝突を回避するために他車両が急ブレーキをかけなければならなくなったり、自車両に急接近したりする可能性がある。
【0007】
本発明は、このような問題を解決するためになされたものであり、ドライバの異常発生時に車両をより安全に停止させることができる車両制御装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
上述した課題を解決するために、本発明は、車両のドライバに異常が発生した場合に車両を路端に寄せて停車させる車両制御装置であって、車両の後方を含む周辺の他車両を検出する周辺センサと、車両が走行している車線よりも路端側に隣接車線が存在する場合、車両を隣接車線に車線変更させるように、車両の駆動力源、操舵装置及び/又は制動装置を制御可能に構成されたコントローラと、を有し、コントローラは、隣接車線を走行する他車両の想定速度を取得し、想定速度と周辺センサの最大検出距離とに基づき、隣接車線において車両から最大検出距離以上後方を想定速度で走行している他車両が、所定の減速度で車両の車線変更時の速度まで減速した時に、他車両が車両から最小車間距離以上後方であるための、車両の車線変更時の必要最低速度を算出し、車両の速度が必要最低速度未満である場合、隣接車線への車両の車線変更を禁止するように構成されている。
【0009】
このように構成された本発明によれば、コントローラは、車両のドライバに異常が発生した場合、隣接車線を走行する他車両の想定速度と、周辺の他車両を検出する周辺センサの最大検出距離とに基づき、隣接車線において車両から最大検出距離以上後方を想定速度で走行している他車両が、所定の減速度で車両の車線変更時の速度まで減速した時に、他車両が車両から最小車間距離以上後方であるための、車両の車線変更時の必要最低速度を算出し、車両の速度が必要最低速度未満である場合、隣接車線への車両の車線変更を禁止するので、車両が隣接車線へ車線変更すると周辺センサの最大検出距離よりも後方から接近してくる他車両の急減速や衝突を招く可能性がある場合には車線変更を禁止し、例えば現在走行している車線で車両を停止させることができる。これにより、ドライバの異常発生時に、他車両の急減速や衝突を回避して車両をより安全に停止させることができる。
【0010】
本発明において、好ましくは、コントローラは、想定速度をv
b
、最大検出距離をdr
max
、所定の減速度をd、最小車間距離をfd
min
、車両が車線変更を開始した時から他車両が減速を開始するまでの遅れ時間をt
d
、必要最低速度をv
min
とした場合に、下記式から必要最低速度v
min
を算出するように構成されている。
TIFF
2025180460000002.tif
14
170
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ