TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025180413
公報種別
公開特許公報(A)
公開日
2025-12-11
出願番号
2024087745
出願日
2024-05-30
発明の名称
転舵制御装置及び転舵システム
出願人
株式会社デンソー
,
国立大学法人 名古屋工業大学
代理人
弁理士法人服部国際特許事務所
主分類
B62D
6/00 20060101AFI20251204BHJP(鉄道以外の路面車両)
要約
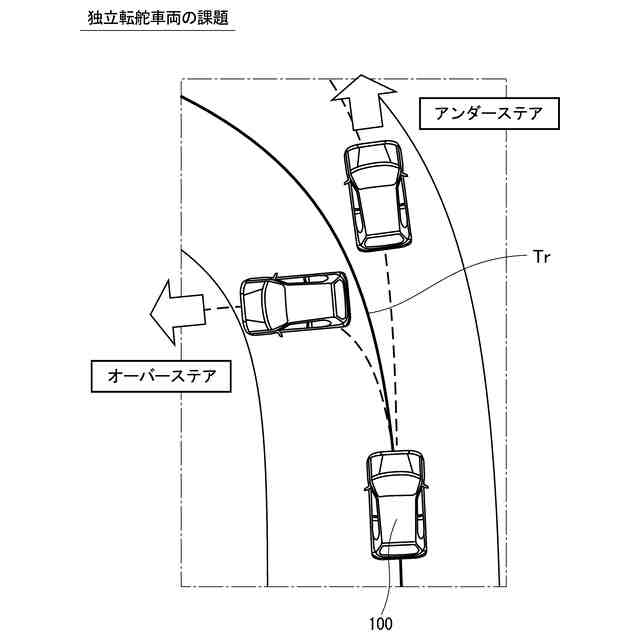
【課題】三輪以上の独立転舵車両の旋回時に、目標走行経路からの逸脱を防止し、乗り心地や電費の悪化を抑制する転舵制御装置を提供する。
【解決手段】転舵制御装置601-604は、互いに機械的に拘束されない三つ以上の車輪が独立して転舵可能な車両において、各車輪の転舵を制御する。カーブ情報作成部65は、取得した元情報に基づいて車両進行方向の道路のカーブ情報を作成する。目標車両動作決定部66は、自車両の位置、車速、及びカーブ情報に基づいて、車両が目標走行経路をトレースするように目標車両動作を決定する。旋回中心座標決定部67は、車両諸元と目標車両動作とに基づいて旋回中心座標を決定する。目標転舵角決定部68は、決定された旋回中心座標に基づいて各車輪の目標転舵角δ1
*
-δ4
*
を決定する。
【選択図】図6
特許請求の範囲
【請求項1】
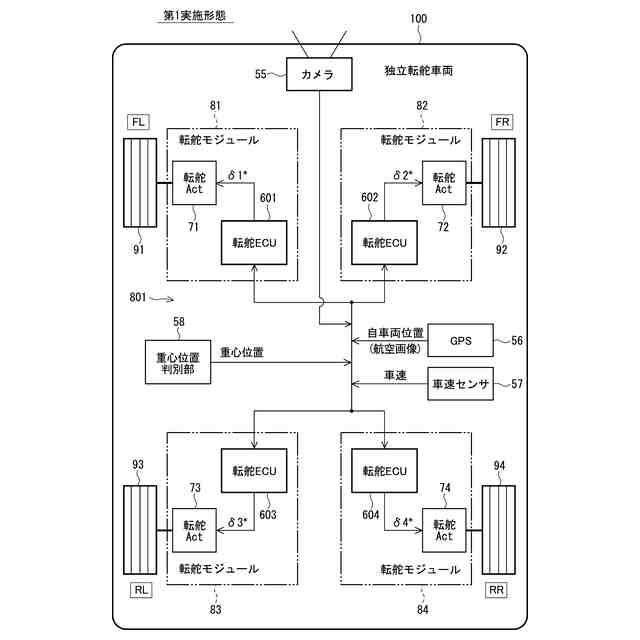
互いに機械的に拘束されない三つ以上の車輪(91-94)が独立して転舵可能な車両(100)において、各車輪の転舵を制御する転舵制御装置であって、
取得した元情報に基づいて車両進行方向の道路のカーブ情報を作成するカーブ情報作成部(65)と、
自車両の位置、車速、及び前記カーブ情報に基づいて、車両が目標走行経路をトレースするように目標車両動作を決定する目標車両動作決定部(66)と、
車両諸元と前記目標車両動作とに基づいて旋回中心座標を決定する旋回中心座標決定部(67)と、
決定された旋回中心座標に基づいて各車輪の目標転舵角(δ1
*
-δ4
*
)を決定する目標転舵角決定部(68)と、
を備える転舵制御装置。
続きを表示(約 700 文字)
【請求項2】
前記旋回中心座標決定部は、
旋回時に消費する電費の低減を優先する電費優先モード、
旋回時の乗員の乗り心地を優先する乗り心地優先モード、
旋回時に消費する電費の低減、及び、旋回時の乗員の乗り心地を両立する両立モード、のうち予め設定された走行モードに応じて旋回中心座標を決定する請求項1に記載の転舵制御装置。
【請求項3】
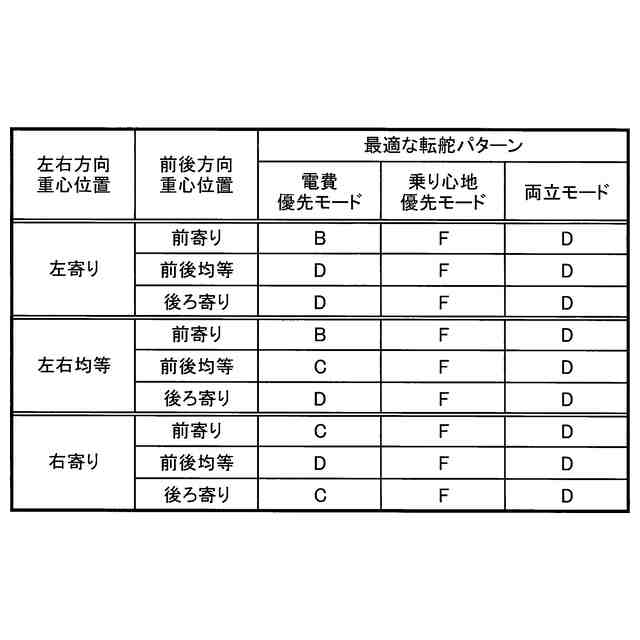
車両の重心位置が、車両前後方向の中心に対して前寄りであるか後ろ寄りであるか、また、車両左右方向の中心に対して左寄りであるか右寄りであるかを判別する重心位置判別部(58)を備えた車両に搭載され、
前記旋回中心座標決定部は、前記重心位置判別部により判別された車両の重心位置に応じて旋回中心座標を決定する請求項2に記載の転舵制御装置。
【請求項4】
各車輪に対応して設けられ、対応する車輪の目標転舵角を決定する請求項1~3のいずれか一項に記載の転舵制御装置(601-604)と、
各車輪に対応して設けられ、前記転舵制御装置から指令された目標転舵角に従って、対応する車輪を転舵させる転舵アクチュエータ(71-74)と、
を含む転舵システム。
【請求項5】
車両における上位制御装置として設けられ、全ての車輪の目標転舵角を決定する請求項1~3のいずれか一項に記載の転舵制御装置(600)と、
各車輪に対応して設けられ、前記転舵制御装置から指令された目標転舵角に従って、対応する車輪を転舵させる転舵アクチュエータ(71-74)と、
を含む転舵システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、転舵制御装置及び転舵システムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、車両の旋回時に目標走行経路に沿って走行するように転舵角を制御する転舵制御装置が知られている。
【0003】
例えば特許文献1には、前輪及び後輪をそれぞれ転舵可能な車両において、前輪及び後輪の転舵に要する消費電力の和を最小にするように、前輪転舵角と後輪転舵角との目標の組み合わせを決定する前後輪転舵角制御装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-106255号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
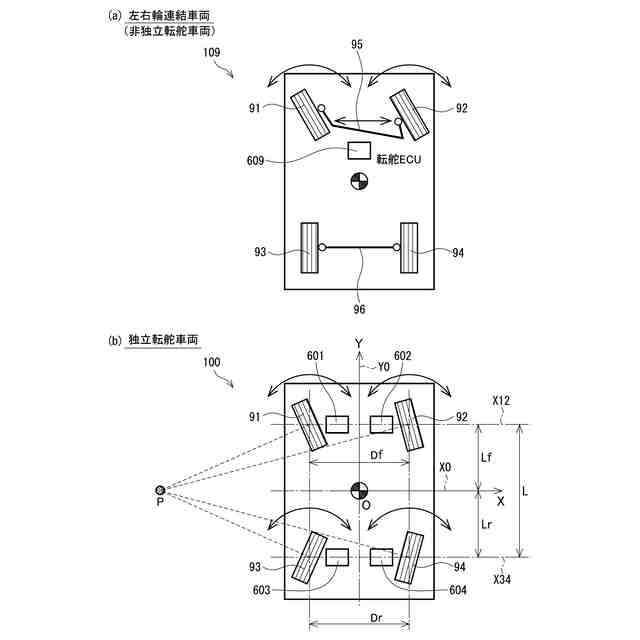
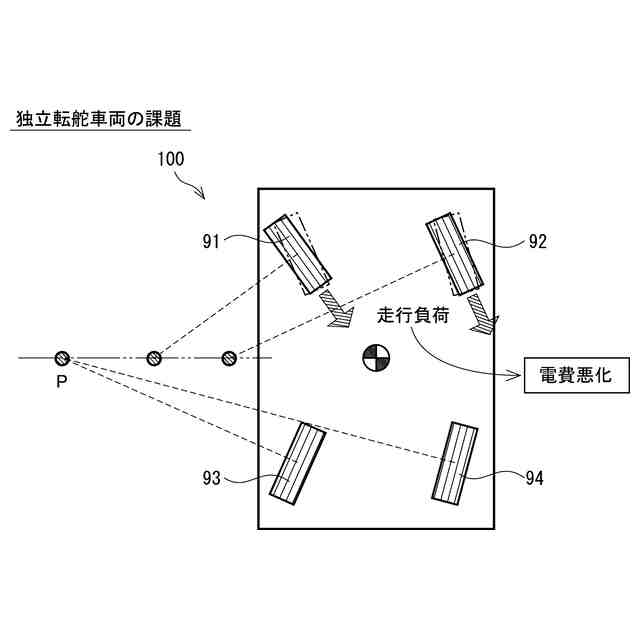
特許文献1の装置が適用される車両は、前輪及び後輪における各左右輪は独立して転舵しない。一方、互いに機械的に拘束されない三つ以上の車輪が独立して転舵可能な独立転舵車両が知られている。独立転舵車両では、各車輪の転舵を個別に制御できるメリットがある反面、旋回時に各車輪が適切に協調しないと挙動の乱れが生じ、車両が目標走行経路を逸脱するおそれがある。また、乗り心地の悪化やタイヤ引き摺りによる電費悪化が生じる可能性がある。
【0006】
本発明は上述の点に鑑みて創作されたものであり、その目的は、三輪以上の独立転舵車両の旋回時に、目標走行経路からの逸脱を防止し、乗り心地や電費の悪化を抑制する転舵制御装置、及び、その転舵制御装置を含む転舵システムを提供することにある。
【課題を解決するための手段】
【0007】
本発明の転舵制御装置は、互いに機械的に拘束されない三つ以上の車輪(91-94)が独立して転舵可能な車両(100)において、各車輪の転舵を制御する。この転舵制御装置は、カーブ情報作成部(65)と、目標車両動作決定部(66)と、旋回中心座標決定部(67)と、目標転舵角決定部(68)と、を備える。
【0008】
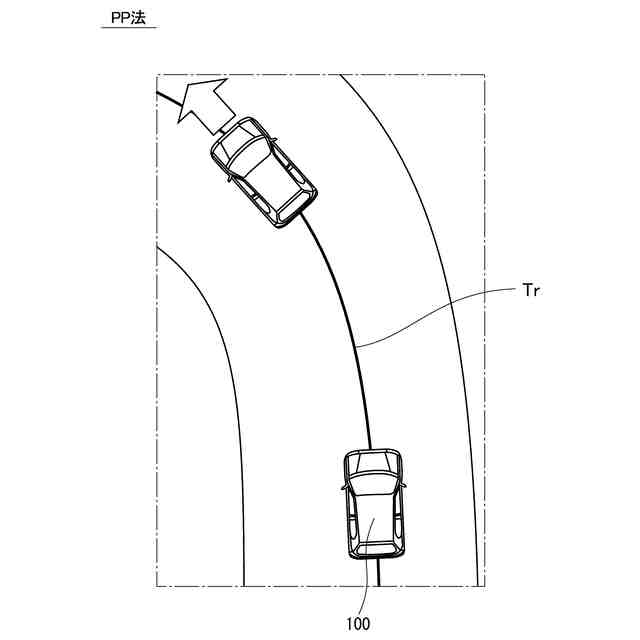
カーブ情報作成部は、取得した元情報に基づいて車両進行方向の道路のカーブ情報を作成する。目標車両動作決定部は、自車両の位置、車速、及びカーブ情報に基づいて、車両が目標走行経路をトレースするように目標車両動作を決定する。例えば目標車両動作決定部は、Pure Pursuit法と呼ばれる経路追従制御を用いる。
【0009】
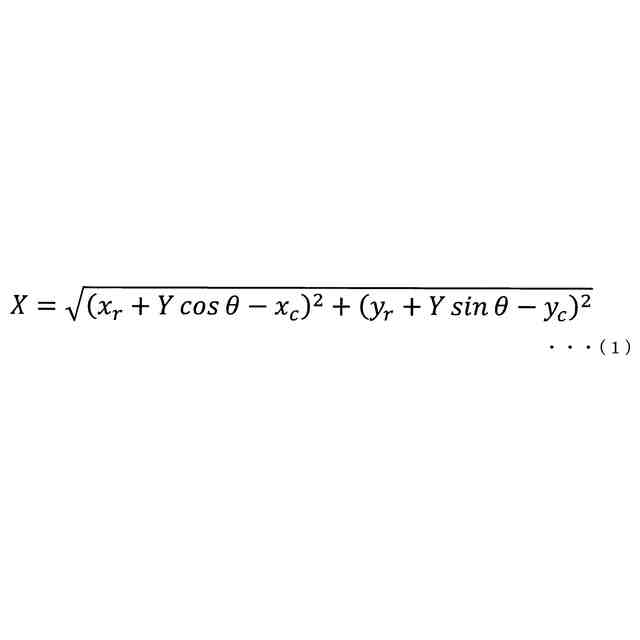
旋回中心座標決定部は、車両諸元と目標車両動作とに基づいて旋回中心座標を決定する。目標転舵角決定部は、決定された旋回中心座標に基づいて各車輪の目標転舵角(δ1
*
-δ4
*
)を決定する。これにより本発明では、独立転舵車両の旋回時に、目標走行経路からの逸脱を防止し、乗り心地や電費の悪化を抑制することができる。例えば目標転舵角決定部は、アッカーマン理論により各車輪の目標転舵角を決定する。
【0010】
好ましくは、旋回中心座標決定部は、旋回時に消費する電費の低減を優先する「電費優先モード」、旋回時の乗員の乗り心地を優先する「乗り心地優先モード」、旋回時に消費する電費の低減、及び、旋回時の乗員の乗り心地を両立する「両立モード」のうち、予め設定された走行モードに応じて旋回中心座標を決定する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ