TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025178987
公報種別
公開特許公報(A)
公開日
2025-12-09
出願番号
2024085916
出願日
2024-05-27
発明の名称
旋回制御装置
出願人
新電元工業株式会社
代理人
個人
主分類
B62D
11/04 20060101AFI20251202BHJP(鉄道以外の路面車両)
要約
【課題】旋回時の位置ずれをできる限り小さくする。
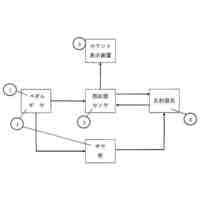
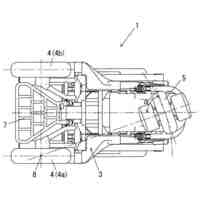
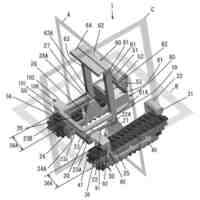
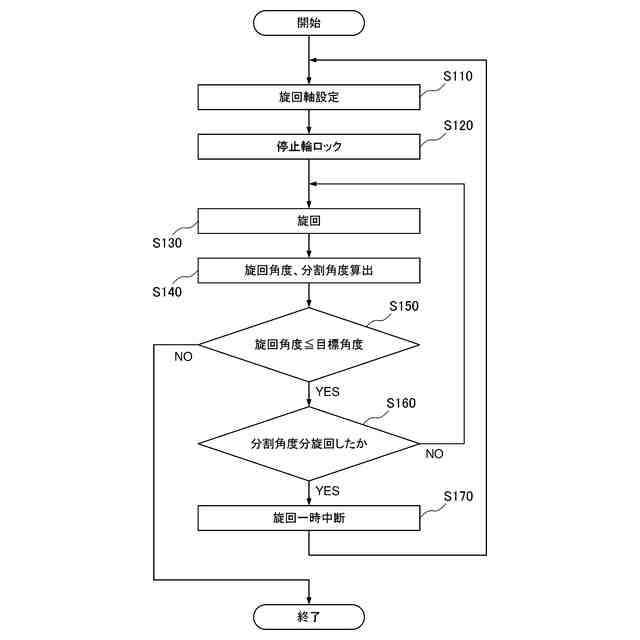
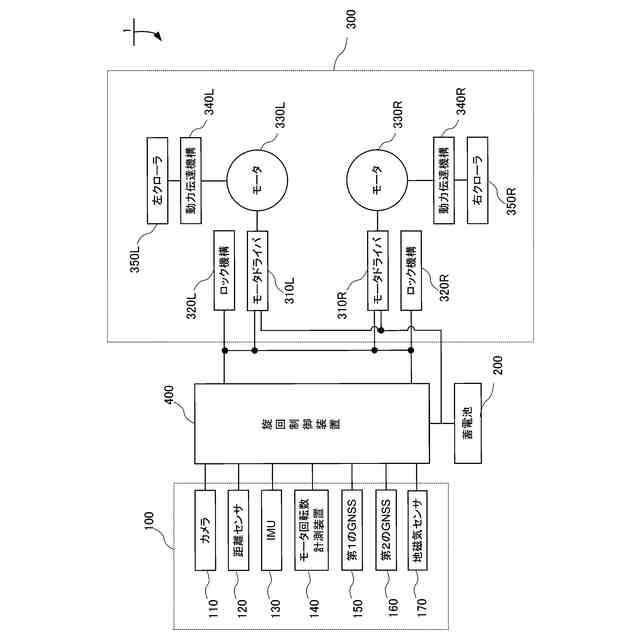
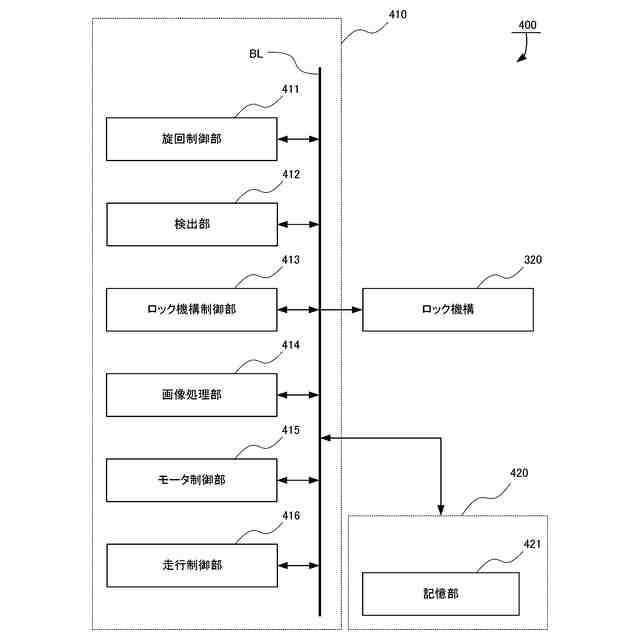
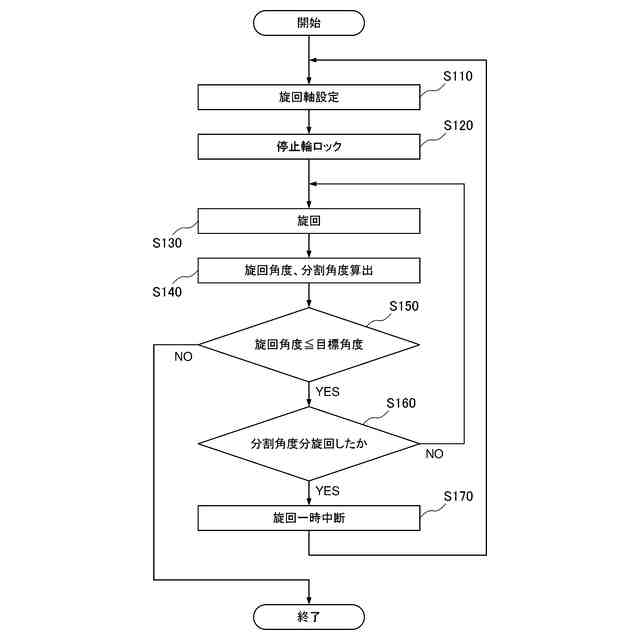
【解決手段】左右に走行用のクローラ350L、350Rを備えた装軌車両1の自動旋回を制御する旋回制御装置400であって、左右のクローラ350L、350Rを制御して、装軌車両1を信地旋回させる旋回制御部411と、旋回角度を検出する検出部412と、を含み、旋回制御部411は、該検出された旋回角度が予め設定された設定旋回角度を所定の割合に分割した設定分割旋回角度になった場合に、都度、信地旋回の軸を交互に変更して制御を実行する。
【選択図】図3
特許請求の範囲
【請求項1】
左右に走行用のクローラを備えた装軌車両の自動旋回を制御する旋回制御装置であって、
左右の前記クローラを制御して、前記装軌車両を信地旋回させる旋回制御部と、
旋回角度を検出する検出部と、
を含み、
前記旋回制御部は、該検出された前記旋回角度が予め設定された設定旋回角度を所定の割合に分割した設定分割旋回角度になった場合に、都度、前記信地旋回の軸を交互に変更して制御を実行する旋回制御装置。
続きを表示(約 640 文字)
【請求項2】
左右に走行用のクローラを備えた装軌車両の自動旋回を制御する旋回制御装置であって、
左右のクローラを制御して、前記装軌車両を緩旋回させる旋回制御部と、
旋回角度を検出する検出部と、
を含み、
前記旋回制御部は、該検出された前記旋回角度が予め設定された設定旋回角度を所定の割合に分割した設定分割旋回角度になった場合に、都度、前記緩旋回の軸を交互に変更して制御を実行する旋回制御装置。
【請求項3】
旋回時の軸となる前記クローラを機構的にロックするロック機構と、
前記ロック機構を制御するロック機構制御部と、
を含む、請求項1に記載の旋回制御装置。
【請求項4】
前記クローラには、ラグが無い請求項1から3のいずれか1項に記載の旋回制御装置。
【請求項5】
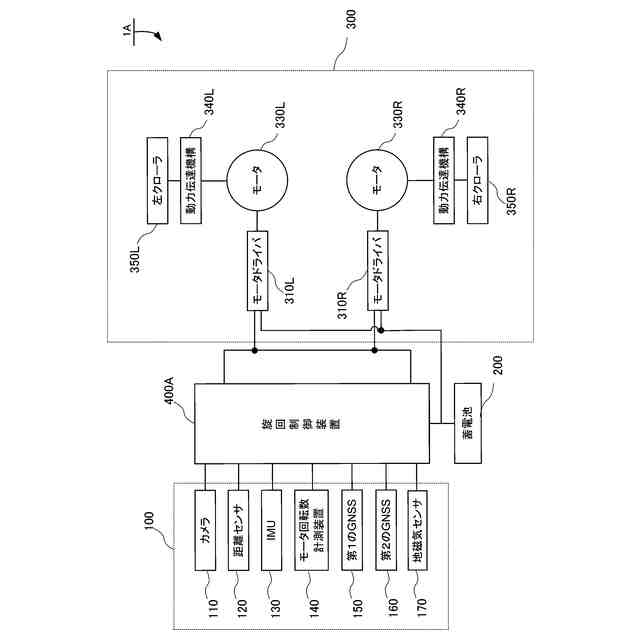
旋回時に停止すべきクローラは、駆動するモータの励磁あるいは前記ロック機構による機構的なロックにより停止させる請求項3に記載の旋回制御装置。
【請求項6】
前記旋回制御部は、旋回時において微小角度の旋回を繰り返し、前記微小角度の旋回については、予め駆動するモータの回転数を設定する方法、あるいは、角加速度センサにより回転角度を測定する方法、GNSSを複数用いて現在の方角を検知する方法、地磁気センサにより現在の方角を検知する方法を含む方法により、旋回制御を実行する請求項4に記載の旋回制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、旋回制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
装軌車両は、一般的に、左右に走行用のクローラを有し、不整地等において高い走破性を獲得できる車両として知られている。
また、現在では、動力源として電動モータを使用した装軌車両も普及している。
【0003】
ここで、履帯を備えた装軌車両における旋回方法としては、左右クローラの回転を制御し、装軌車両の中心を軸として旋回する超信地旋回や、片側の履帯を停止して、もう一方の履帯だけを回転させ、停止側の履帯を軸として旋回する信地旋回が知られている。
【0004】
ところが、超信地旋回においては、旋回時の位置ずれは少ないが、旋回時のトルクが大きくなる問題がある。
つまり、超信地旋回においては、旋回時の位置ずれは少ないものの、例えば、農地の畑の畝間を旋回する場合には、土塊を押しながら旋回するため、大きなトルクが必要となる。
【0005】
また、信地旋回においては、旋回時のトルクは小さいが位置ずれが大きくなるという問題がある。
つまり、信地旋回においては、左右いずれかのクローラを軸として旋回するため、旋回半径が大きく、例えば、90度旋回後の位置ずれが大きくなる。
【0006】
こうした上記の問題点に対して、左右に走行用のクローラを備えた装軌車両の自動旋回を行う旋回制御装置であって、左右の前記クローラの動力源の負荷値を取得する取得部と、前記装軌車両が目標方向を向くまで、左右の前記クローラを制御して、前記装軌車両を超信地旋回又は信地旋回させる旋回制御部と、前記負荷値が所定値に達する度に前記旋回制御部による超信地旋回又は信地旋回を一時中断させて、左右の前記クローラを制御して、前記装軌車両を所定距離だけ前進又は後退させる移動制御部とを備える、旋回制御装置が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0007】
特開2023-128168号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に記載の技術では、旋回を一時中断し、所定距離を前進または後退させるため、前進または後退時に位置ずれが発生するとともに、一旦前進または後退を行うため、農地の畑の畝間を旋回する場合、畝にぶつかる虞がある。
また、旋回するためには、十分な広さを持った畝間を用意する必要があるが、畝間を広くすることは圃場面積当たりの収穫量が減少するという課題もある。
これにより、旋回時の位置ずれを極限まで小さくする必要がある。
【0009】
そこで、本発明は上述の課題に鑑みてなされたものであり、旋回時の位置ずれをできる限り小さくする旋回制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
形態1;本発明の1またはそれ以上の実施形態は、左右に走行用のクローラを備えた装軌車両の自動旋回を制御する旋回制御装置であって、左右の前記クローラを制御して、前記装軌車両を信地旋回させる旋回制御部と、旋回角度を検出する検出部と、を含み、前記旋回制御部は、該検出された前記旋回角度が予め設定された設定旋回角度を所定の割合に分割した設定分割旋回角度になった場合に、都度、前記信地旋回の軸を交互に変更して制御を実行する旋回制御装置を提案している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
新電元工業株式会社
半導体素子
4日前
新電元工業株式会社
半導体素子
4日前
新電元工業株式会社
半導体素子
4日前
新電元工業株式会社
半導体装置
19日前
新電元工業株式会社
旋回制御装置
今日
新電元工業株式会社
作業用ロボット
今日
新電元工業株式会社
半導体装置及び半導体装置の製造方法
5日前
個人
カート
5か月前
個人
走行装置
5か月前
個人
三輪バイク
1か月前
個人
台車
19日前
個人
乗り物
7か月前
個人
電動走行車両
5か月前
個人
自転車用歩数計
1か月前
個人
閂式ハンドル錠
5か月前
個人
発音装置
9か月前
個人
電動モビリティ
9か月前
個人
駐輪設備
3か月前
個人
ボギー・フレーム
3か月前
個人
“zen-go.”
4か月前
個人
自由方向乗車自転車
9か月前
個人
ルーフ付きトライク
3か月前
個人
三輪電動車両
1か月前
個人
自転車前輪固定装置
今日
個人
ルーフ付きトライク
4か月前
個人
車の室内高温防止屋根
1か月前
個人
キャンピングトライク
10か月前
井関農機株式会社
作業車両
1か月前
個人
パワーアシスト自転車
3か月前
個人
ステアリングの操向部材
10か月前
個人
電動式ルーフ付きトライク
11日前
個人
電動式ルーフ付きトライク
11日前
個人
電動式ルーフ付きトライク
11日前
井関農機株式会社
収穫作業車両
5日前
株式会社豊田自動織機
産業車両
6か月前
個人
フロントフットブレーキ。
5か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ