TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025178734
公報種別
公開特許公報(A)
公開日
2025-12-09
出願番号
2024085517
出願日
2024-05-27
発明の名称
ロボット教示システム及びロボット制御装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20251202BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】フラットパネルを製造するフラットパネル製造システムにおいて、搬送ロボットをチャンバ内における目標位置に移動させる作業プログラムを適切に生成することができるロボット教示システム及びロボット制御装置を提供することである。
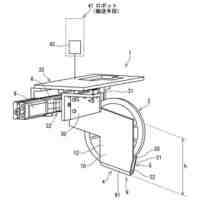
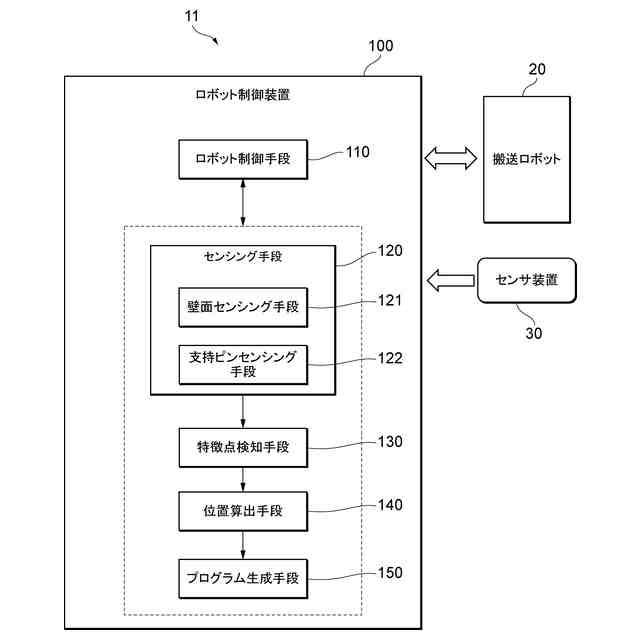
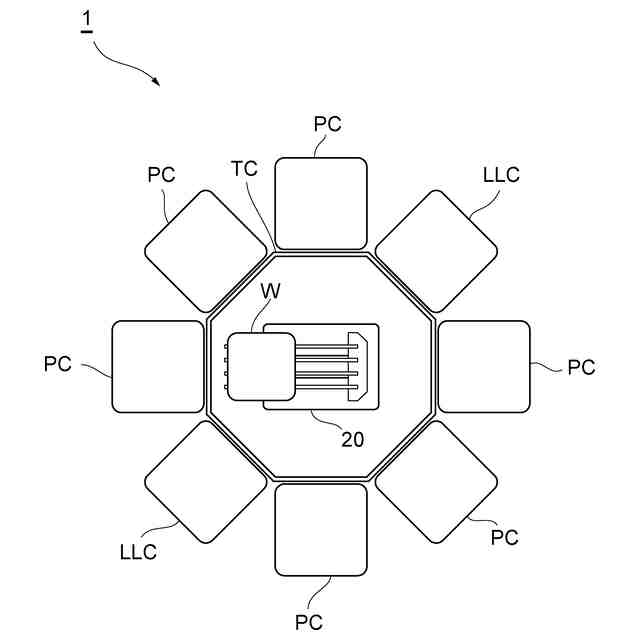
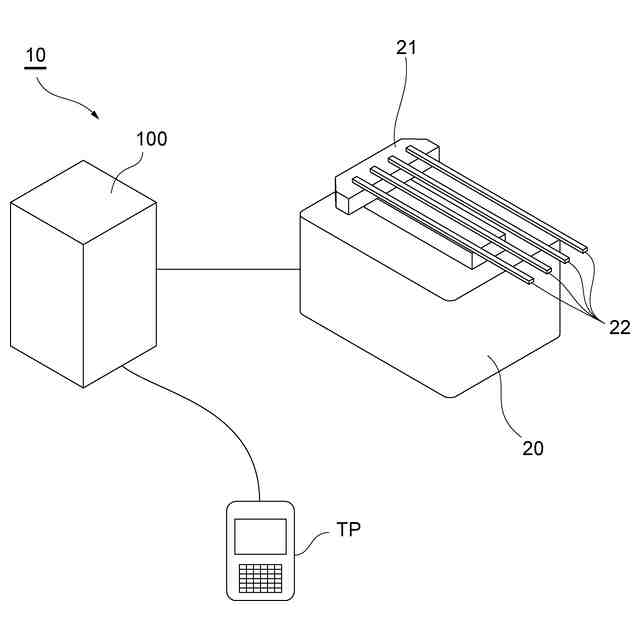
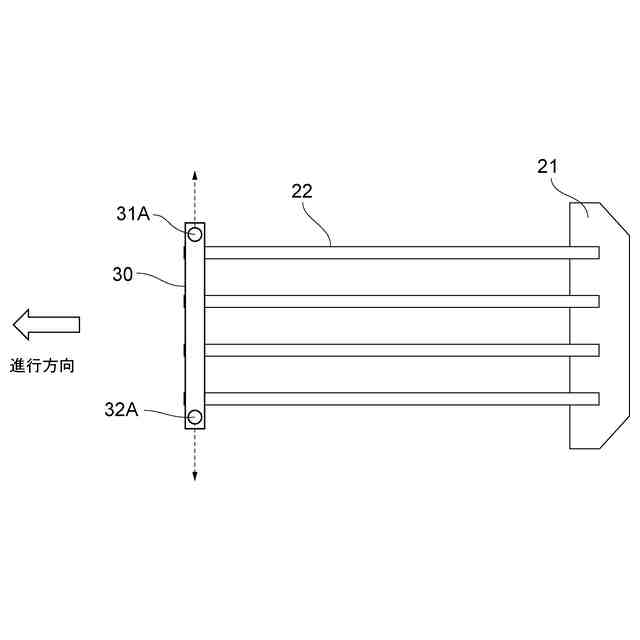
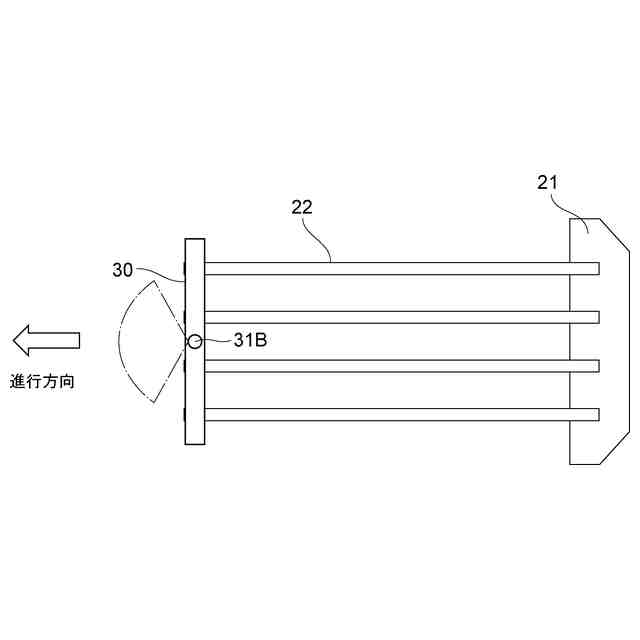
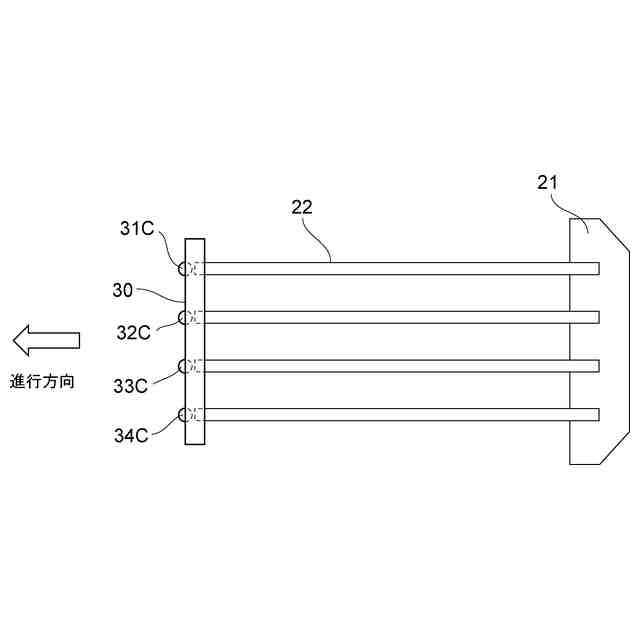
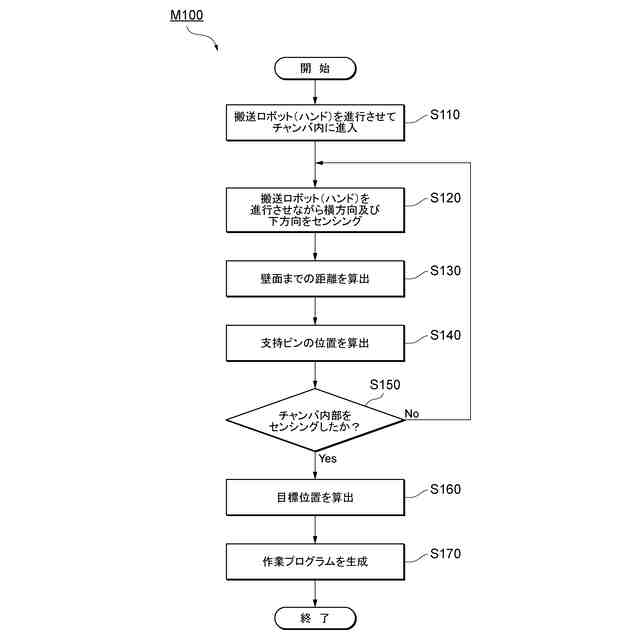
【解決手段】ロボット教示システム11は、搬送ロボット20におけるワークWを保持する保持部22に設置されたセンサ30によってチャンバPC内をセンシングしながら当該チャンバPC内の特徴点を検知する特徴点検知手段130と、特徴点の位置を算出する位置算出手段140と、特徴点の位置に基づく目標位置に移動するように搬送ロボット20を動作させるための作業プログラムを生成するプログラム生成手段150と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
複数のチャンバ、当該複数のチャンバ間においてワークを搬送する搬送ロボット、及び当該搬送ロボットの動作を制御するロボット制御装置を有し、フラットパネルを製造するフラットパネル製造システムで用いられるロボット教示システムであって、
前記搬送ロボットにおける前記ワークを保持する保持部に設置されたセンサによって前記チャンバ内をセンシングしながら当該チャンバ内の特徴点を検知する特徴点検知手段と、
前記特徴点の位置を算出する位置算出手段と、
前記特徴点の位置に基づく目標位置に移動するように前記搬送ロボットを動作させるための作業プログラムを生成するプログラム生成手段と、を備える、
ロボット教示システム。
続きを表示(約 730 文字)
【請求項2】
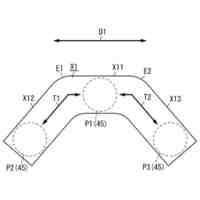
前記特徴点は、前記チャンバ内において前記ワークを支持する支持ピンの少なくとも一部を含む、
請求項1に記載のロボット教示システム。
【請求項3】
前記特徴点は、前記チャンバを構成する壁面の少なくとも一部を含む、
請求項1に記載のロボット教示システム。
【請求項4】
前記作業プログラムでは、前記チャンバ内における衝突を回避するように前記搬送ロボットの動作経路が設定される、
請求項1に記載のロボット教示システム。
【請求項5】
前記チャンバ内における前記特徴点の位置をマッピングするマッピング手段と、
前記マッピングの結果を表示する表示手段と、をさらに備える、
請求項1に記載のロボット教示システム。
【請求項6】
前記目標位置をどのように設定するかをユーザ操作から受け付ける目標位置受付手段を、さらに備える、
請求項1に記載のロボット教示システム。
【請求項7】
フラットパネルを製造するフラットパネル製造システムに用いられ、複数のチャンバ間においてワークを搬送する搬送ロボットの動作を制御するロボット制御装置であって、
前記搬送ロボットにおける前記ワークを保持する保持部に設置されたセンサによって前記チャンバ内をセンシングしながら当該チャンバ内の特徴点を検知する特徴点検知手段と、
前記特徴点の位置を算出する位置算出手段と、
前記特徴点の位置に基づく目標位置に移動するように前記搬送ロボットを動作させるための作業プログラムを生成するプログラム生成手段と、を備える、
ロボット制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット教示システム及びロボット制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、産業界において、多くの産業用ロボットが普及している。例えば、液晶ディスプレイや有機ELディスプレイなどのフラットパネルディスプレイ(FPD:Flat Panel Display)を含む大型のフラットパネル用のガラス基板に対して処理を行うための大型の製造システムがある。
【0003】
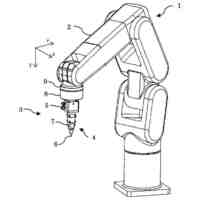
このような大型の製造システムでは、ガラス基板などのワークに対して種々の処理を行うために、各処理に対応するプロセスチャンバが複数配置されている。さらに、搬送ロボット(搬送装置)がトランスファチャンバに配置されており、当該搬送ロボット(搬送装置)によって、各プロセスチャンバにおける所望の位置へワークが搬送される。
【0004】
特許文献1では、搬送装置は、支持ピックの先端に光学センサを備えて、搬送室において当該支持ピックを上方移動させながら先端方向に光を照射することによって、搬送室とロードロック室との間の開口部の上端位置を特定している。また、ロードロック室において、支持ピックを上方移動/回転移動させながら先端方向/下方向に光を照射することによって、バッファ(溝)の上端位置/側壁位置を特定している。そして、特定された開口部の上端位置やバッファ(溝)の上端位置/側壁位置に基づいて、搬送装置の動作が補正される。このように、特許文献1では、搬送装置の動作位置に関する調整を自動的に行っている。
【先行技術文献】
【特許文献】
【0005】
特開2019-220588号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示されている搬送装置では、チャンバ内で回転しながら特定のバッファ(溝)の上端位置/側壁位置を確認しているため、これらに衝突する可能性があり、また、局所的な検知であるため、チャンバ内全体を把握できていない。チャンバ内にその他の障害物が存在した場合には、これらに衝突するおそれもある。
【0007】
ところで、そもそも大型のフラットパネル用のガラス基板に対して処理を行うための大型の製造システムでは、作業者がチャンバ内部の様子を直接確認しながら、搬送ロボットを操作することは困難であるという問題がある。
【0008】
そこで、本発明は、フラットパネルを製造するフラットパネル製造システムにおいて、搬送ロボットをチャンバ内における目標位置に移動させる作業プログラムを適切に生成することができるロボット教示システム及びロボット制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
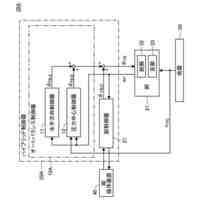
本発明の一態様に係るロボット教示システムは、複数のチャンバ、当該複数のチャンバ間においてワークを搬送する搬送ロボット、及び当該搬送ロボットの動作を制御するロボット制御装置を有し、フラットパネルを製造するフラットパネル製造システムで用いられるロボット教示システムであって、搬送ロボットにおけるワークを保持する保持部に設置されたセンサによってチャンバ内をセンシングしながら当該チャンバ内の特徴点を検知する特徴点検知手段と、特徴点の位置を算出する位置算出手段と、特徴点の位置に基づく目標位置に移動するように搬送ロボットを動作させるための作業プログラムを生成するプログラム生成手段と、を備える。
【0010】
この態様によれば、特徴点検知手段は、搬送ロボットにおける保持部に設置されたセンサによってチャンバ内の特徴点を検知し、プログラム生成手段は、位置算出手段によって算出された特徴点の位置に基づく目標位置に移動するように搬送ロボットを動作させるための作業プログラムを生成する。これにより、チャンバ内部の様子を把握して、搬送ロボットをチャンバ内における目標位置に移動させる作業プログラムを適切に生成することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
手持ち挟持具
1か月前
トヨタ自動車株式会社
学習装置
19日前
CKD株式会社
把持装置
4日前
ダイセイ株式会社
ロボット自動刻印装置
4日前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
瓜生製作株式会社
電動締付工具
12日前
株式会社安川電機
ロボット
1か月前
株式会社不二越
垂直多関節ロボット
19日前
株式会社三共コーポレーション
工具保持具
1か月前
株式会社マキタ
集塵アタッチメント
11日前
トヨタ自動車株式会社
ロボットハンド
1か月前
株式会社マキタ
現場用作業機
1か月前
NTN株式会社
把持装置
4日前
ニデックインスツルメンツ株式会社
産業用ロボット
1か月前
株式会社マキタ
電動工具
19日前
学校法人立命館
ロボットハンド制御システム
1か月前
株式会社マキタ
作業機
1か月前
株式会社人機一体
有脚ロボット
1か月前
国立大学法人東京科学大学
多自由度入力装置用制御装置
11日前
株式会社ケイズベルテック
物品定量取り分け装置
1か月前
ファナック株式会社
経路データセット生成
1か月前
株式会社田村製作所
エンドエフェクタ及びロボット装置
1か月前
積水ハウス株式会社
固定ピン保持用アタッチメント
1か月前
ダイハツ工業株式会社
ロボット制御システム
4日前
株式会社デンソー
ワーク投入装置
1か月前
株式会社秦製作所
ジャック差込口ナット締め用の供回り防止レンチ
20日前
日本発條株式会社
ケーブルユニット及びその製造方法
1か月前
泰芳機械股分有限公司
コレット収納装置
1か月前
パナソニック株式会社
インパクト工具
4日前
パナソニック株式会社
インパクト回転工具
19日前
SMC株式会社
チャック装置およびチャックシステム
1か月前
国立大学法人 東京大学
ロボット及びロボットの投入方法
11日前
トヨタ自動車株式会社
ロボットの保護カバーの挟み込み防止構造
1か月前
工機ホールディングス株式会社
作業機
1か月前
マクセルイズミ株式会社
電動工具
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ