TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025177988
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024085192
出願日
2024-05-24
発明の名称
分散行動制御装置、分散行動制御システムおよび分散行動制御方法
出願人
株式会社日立製作所
代理人
青稜弁理士法人
主分類
G06Q
99/00 20060101AFI20251128BHJP(計算;計数)
要約
【課題】アセットの派遣先の領域で行動目標に関する情報が未知の場合であっても、アセットグループ内の各アセットを自律的に分散させて行動制御を行う分散行動制御装置、分散行動制御システム及び分散行動制御方法を提供する。
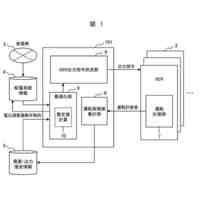
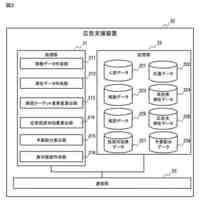
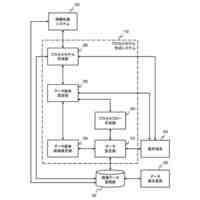
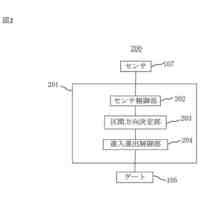
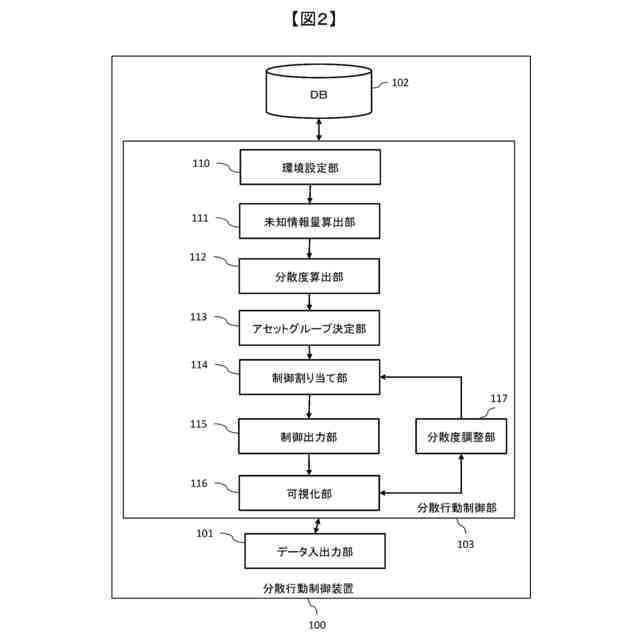
【解決手段】分散行動制御装置100において、分散行動制御部103では、環境設定部110がアセットグループの行動に関して目標および領域を含む環境情報を設定し、未知情報量算出部111が環境情報に基づいてアセットグループの行動の目標を達成するのに必要な未知情報量を算出し、分散度算出部112が未知情報量に基づいてアセットグループが自律的に分散して行動するための分散度を算出し、制御割り当て部114が分散度に基づいて前記1以上のアセットに対して自律的に分散して行動するための制御の割り当てを定め、制御出力部115が制御の割り当て、可視化部116が各アセットの行動情報を出力装置に表示させる。
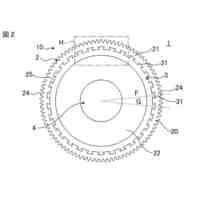
【選択図】図2
特許請求の範囲
【請求項1】
1以上のアセットの行動を制御する分散行動制御装置であって、
前記1以上のアセットの行動に関して目標および領域を含む環境情報を設定する環境設定部と、
前記設定された環境情報に基づいて前記1以上のアセットの行動の目標を達成するのに必要な未知情報量を算出する未知情報量算出部と、
前記算出された未知情報量に基づいて前記1以上のアセットが自律的に分散して行動するための分散度を算出する分散度算出部と、
前記算出された分散度に基づいて前記1以上のアセットに対して自律的に分散して行動するための制御の割り当てを定める制御割り当て部と、
前記定められた制御の割り当てを前記1以上のアセットの行動情報として出力する制御出力部と、
を備えることを特徴とする分散行動制御装置。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載の分散行動制御装置において、前記1以上のアセットはアセットグループであり、さらに、前記分散度を前記アセットグループ内のアセット数の情報を用いて四則演算してサブアセットグループ数を決定し、前記未知情報量が多い領域にサブアセットグループを決定するアセットグループ決定部を有し、前記制御割り当て部は前記決定されたサブアセットグループに制御を割り当てることを特徴とする分散行動制御装置。
【請求項3】
請求項2に記載の分散行動制御装置において、前記未知情報量は未知度で表され、前記未知情報量算出部は、前記1以上のアセットの行動を実施する領域において、あらかじめ決めた一定の領域の間隔で未知度を算出し、前記各領域に未知度を割り当て、前記分散度算出部は前記各領域で定められた未知度に基づき各領域での分散度を算出し、前記アセットグループ決定部は、前記各領域における分散度の中で最も大きな分散度を用いサブアセットグループ数を決定し、前記未知度が高い領域にサブアセットグループを決定し、前記制御割り当て部は前記サブアセットグループに制御を割り当てることを特徴とする分散行動制御装置。
【請求項4】
請求項2に記載の分散行動制御装置において、前記未知情報量算出部は、前記アセットの行動を実施する領域において、あらかじめ決めた一定の領域の間隔で未知度を算出し、前記隣接する各領域の未知度で多数決を行って最も多い未知度に更新し、前記更新された未知度が等しい領域をつなげて大きくし、前記分散度算出部は前記各領域の未知度に対して分散度を算出し、前記アセットグループ決定部は、前記各領域における分散度の中で最も大きな分散度を用いてサブアセットグループ数を決定し、前記未知度が高い領域にサブアセットグループを決定し、前記制御割り当て部はサブアセットグループに制御を割り当てることを特徴とする分散行動制御装置。
【請求項5】
請求項2に記載の分散行動制御装置において、さらに、前記分散度を表示する可視化部と、前記分散度をユーザの操作に応じて調整する分散度調整部とを有し、前記アセットグループ決定部は、前記分散度調整部で調整された分散度に基づきサブアセットグループの数を決定し、前記未知情報量が多い領域でサブアセットグループを決定し、前記制御割り当て部は前記サブアセットグループに制御を割り当て、前記制御出力部は前記制御の割り当てを前記可視化部に出力し、前記分散度調整部は前記可視化部に表示される制御の割り当てを変更して前記分散度を調整することを特徴とする分散行動制御装置。
【請求項6】
請求項5に記載の分散行動制御装置において、前記制御割り当て部は、前記分散度をアセットグループ内のアセット数を用いて四則演算し、前記分散して行動するアセット数を決定し、前記未知情報量が多い領域から各領域の重みを算出し、当該算出された重みに応じて分散して行動するサブアセットグループに含まれるアセット数を算出して、前記サブアセットグループに制御を割り当てることを特徴とする分散行動制御装置。
【請求項7】
請求項2に記載の分散行動制御装置において、前記未知情報量算出部は、前記1以上のアセットの行動領域における未知情報量を算出する際に、前記各領域の行動目標に関する対象の速度などの移動情報に基づいて未知情報量を算出し、前記分散度算出部は前記未知情報量に基づいて複数のアセットを含むアセットグループ内のアセットが自律して分散する行動の度合いを決める分散度を算出し、前記制御割り当て部は前記分散度に基づいてアセットグループ内のアセットを自律的に分散させて行動させる制御を割り当てることを特徴とする分散行動制御装置。
【請求項8】
請求項1に記載の分散行動制御装置において、さらに、前記アセットが命令されている行動の目標に関する情報量とその中の未知情報量とに基づいて未知情報の割合に相当する未知度を算出する未知情報量算出部と、前記未知度に基づき分散度を算出する分散度算出部とを有することを特徴とする分散行動制御装置。
【請求項9】
請求項1に記載の分散行動制御装置において、前記制御割り当て部は、前記1以上のアセットの行動に紐づいた連携度および前記分散度算出部で算出される分散度に基づいて前記1以上のアセットを自律的に分散させて行動させるための制御を割り当てることを特徴とする分散行動制御装置。
【請求項10】
請求項1に記載の分散行動制御装置において、前記未知度が高い領域で分散行動させるアセット数が複数ある場合、前記アセットを行動先で連携させずに自律的に分散させて行動させることを特徴とする分散行動制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、たとえば、分散行動制御装置、分散行動制御システムおよび分散行動制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
ドローンのような移動体をルールベース等の手法を用いて自動行動させるための制御を決める際、複数の移動体を含めるアセットグループが制御対象となる場合がある。その際、各移動体すなわち各アセットを派遣させる先を適切に設定し、各アセットを自律的に強調させて行動させる必要がある。
【0003】
そこで、特許文献1のように、アセットの移動候補先となる領域に存在する物体情報を獲得し、その物体の移動速度を仮定した後、アセットグループ内のアセットの派遣先を決定する提案がある。
【先行技術文献】
【特許文献】
【0004】
特開平7-244644号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したアセットグループにおいて、各アセットの行動制御を決める際、アセットの派遣先行動を決める必要がある。すなわち、アセットの行動目標に関する情報のうちで未知情報の量に基づいて、各アセットをどの程度分散させて行動させるか、各アセットをどの領域に派遣するか、さらに、各アセットをどの程度連携させて行動させるかをそれぞれ決める必要がある。
【0006】
しかしながら、上述した特許文献1では、アセットの派遣先の領域で行動目標に関する情報である対象物の位置情報や数を既知のものとして扱っており、アセットの派遣先で行動目標に関する情報が未知の場合には、適宜適用することは困難である。
【0007】
本発明は、このような背景に鑑みてなされたものであり、アセットの派遣先の領域で行動目標に関する情報が未知の場合であっても、アセットグループ内の各アセットを自律的に分散させて行動制御を行うことが可能な、分散行動制御装置、分散行動制御システムおよび分散行動制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上述した課題を解決し、上記目的を達成するため、本発明の一実施態様は、1以上のアセットの行動を制御する分散行動制御装置であって、前記1以上のアセットの行動に関して目標および領域を含む環境情報を設定する環境設定部と、前記設定された環境情報に基づいて前記1以上のアセットの行動の目標を達成するのに必要な未知情報量を算出する未知情報量算出部と、前記算出された未知情報量に基づいて前記1以上のアセットが自律的に分散して行動するための分散度を算出する分散度算出部と、前記算出された分散度に基づいて前記1以上のアセットに対して自律的に分散して行動するための制御の割り当てを定める制御割り当て部と、前記定められた制御の割り当てを前記1以上のアセットの行動情報として出力する制御出力部と、を備えることを特徴とする。
【0009】
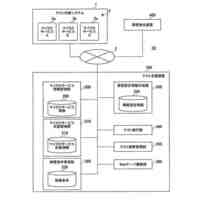
また、本発明の他の実施態様は、分散行動制御システムであって、1以上のアセットと、前記1以上のアセットと通信して前記各アセットの行動を制御する装置と、を備え、前記装置は、環境情報は行動目標の情報やアセット情報やアセットの行動領域を指定する情報であって、前記環境情報に基づいて環境を設定し、前記設定されたアセットの行動を実施する領域において、アセットが命令されている行動の目標に関する情報から未知情報量を算出する未知情報量を算出し、前記算出された未知情報量に基づいて複数のアセットを含むアセットグループ内のアセットの自律的に分散させて行動する際の度合いを決める分散度を算出し、前記算出された分散度に基づいてアセットグループ内のアセットを自律的に分散させて行動させる制御の割り当てを定め、前記各アセットにおける制御の割り当てを出力することを特徴とする。
【0010】
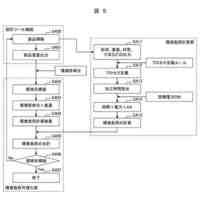
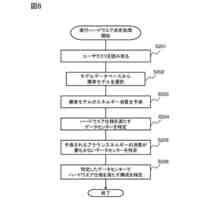
さらに、本発明の他の実施態様は、1以上のアセットの行動を制御する装置の分散行動制御方法であって、環境情報は行動目標の情報やアセット情報やアセットの行動領域を指定する情報であって、前記環境情報に基づいて環境を設定する環境設定ステップと、前記環境設定ステップで設定されたアセットの行動を実施する領域において、アセットが命令されている行動の目標に関する情報から未知情報量を算出する未知情報量を算出する未知情報量算出ステップと、前記未知情報量算出ステップで算出された未知情報量に基づいて複数のアセットを含むアセットグループ内のアセットの自律的に分散させて行動する際の度合いを決める分散度を算出する分散度算出ステップと、前記分散度算出ステップで算出された分散度に基づいてアセットグループ内のアセットを自律的に分散させて行動させる制御の割り当てを定める制御割り当てステップと、前記制御割り当てステップにより定められた各アセットの制御の割り当てを出力する制御出力ステップと、を含むことを特徴とする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
演算装置
10日前
株式会社日立製作所
回転電機
10日前
株式会社日立製作所
軌条車両
4日前
株式会社日立製作所
冷却構造
4日前
株式会社日立製作所
電力変換装置
5日前
株式会社日立製作所
電力変換装置
4日前
株式会社日立製作所
電力変換システム
18日前
株式会社日立製作所
環境負荷算出装置
3日前
株式会社日立製作所
診断装置及び診断方法
3日前
株式会社日立製作所
分散電源管理システム
5日前
株式会社日立製作所
情報提示装置及び方法
3日前
株式会社日立製作所
施設管理装置および方法
18日前
株式会社日立製作所
実行ハードウエア決定方法
3日前
株式会社日立製作所
膜分離設備設計支援システム
18日前
株式会社日立製作所
IT運用管理装置および方法
11日前
株式会社日立製作所
宇宙機、地上局及びアンテナ
18日前
株式会社日立製作所
モータ、及びロータ固定構造
10日前
株式会社日立製作所
検証システムおよび検証方法
10日前
株式会社日立製作所
ソフトエラー率評価システム
19日前
株式会社日立製作所
設計支援装置及び設計支援方法
10日前
株式会社日立製作所
鉄道車両の排障器及び鉄道車両
5日前
株式会社日立製作所
広告支援装置および広告支援方法
11日前
株式会社日立製作所
スカートモール及び乗客コンベア
18日前
株式会社日立製作所
ガス分離システムの劣化診断装置
18日前
株式会社日立製作所
水素製造制御システムおよび方法
12日前
株式会社日立製作所
脆弱性分析装置、脆弱性分析方法
3日前
株式会社日立製作所
異常診断装置及び異常診断システム
10日前
株式会社日立製作所
量子デバイス及び量子情報処理装置
3日前
株式会社日立製作所
テスト支援装置及びテスト支援方法
18日前
株式会社日立製作所
位置推定システム及び位置推定方法
4日前
株式会社日立製作所
情報処理システム及び情報処理方法
10日前
株式会社日立製作所
自律走行車両管理システムおよび方法
10日前
株式会社日立製作所
対話支援システム、及び対話支援方法
11日前
株式会社日立製作所
材料提案システムおよび材料提案装置
3日前
株式会社日立製作所
欠陥検査システム、及び欠陥検査方法
18日前
株式会社日立製作所
車両運行制御装置及び車両運行制御方法
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ