TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025177604
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024084600
出願日
2024-05-24
発明の名称
農作業用自動化システム及び当該システムを搭載した農業機械
出願人
株式会社IHIアグリテック
代理人
弁理士法人英知国際特許商標事務所
主分類
A01C
21/00 20060101AFI20251128BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】GISツールを使用したマップデータの座標を簡単に補正する手段を提供する。
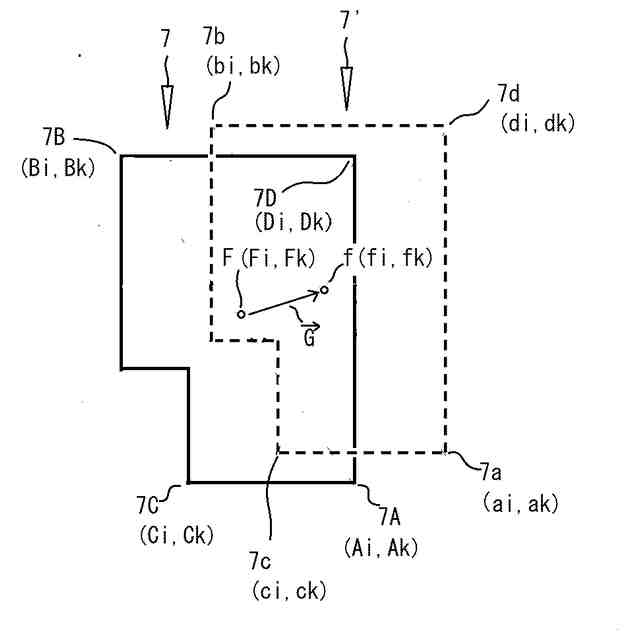
【解決手段】本発明は、作業マップと補正部を備え、前記作業マップは、作業予定の圃場の空撮画像、衛星画像等の実画像に基づいて領域を作成するとともに、前記領域と緯度・経度等の座標を含む地図データと紐づけたデータを含むものであり、前記補正部は、前記作業マップ内で自動または手動で任意な地点を指定でき、指定した前記地点の測位手段による座標データの入力を要求するものであり、入力された前記測位手段により測定された座標データと指定した前記地点の前記作業マップの座標データと比較して、ずれ量を算出し、前記ずれ量を補正量として、前記作業マップ上の全座標データを補正する、または、前記測位手段により測定された全座標データを補正することを特徴とする農作業用自動化システムで課題を解決した。
【選択図】図5
特許請求の範囲
【請求項1】
作業マップと補正部を備え、
前記作業マップは、作業予定の圃場の空撮画像、衛星画像等の実画像に基づいて領域を作成するともに、前記領域と緯度・経度等の座標を含む地図データと紐づけたデータを含むものであり、
前記補正部は、
前記作業マップ内で自動または手動で任意な地点を指定でき、指定した前記地点の測位手段による座標データの入力を要求するものであり、
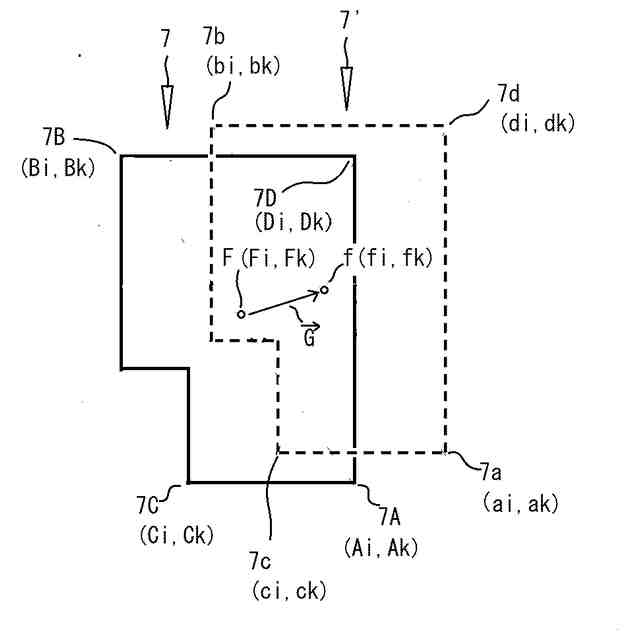
入力された前記測位手段により測定された座標データと指定した前記地点の前記作業マップの座標データと比較して、ずれ量を算出し、前記ずれ量を補正量として、前記作業マップ上の全座標データを補正する、または、前記測位手段により測定される座標データを補正することを特徴とする農作業用自動化システム。
続きを表示(約 280 文字)
【請求項2】
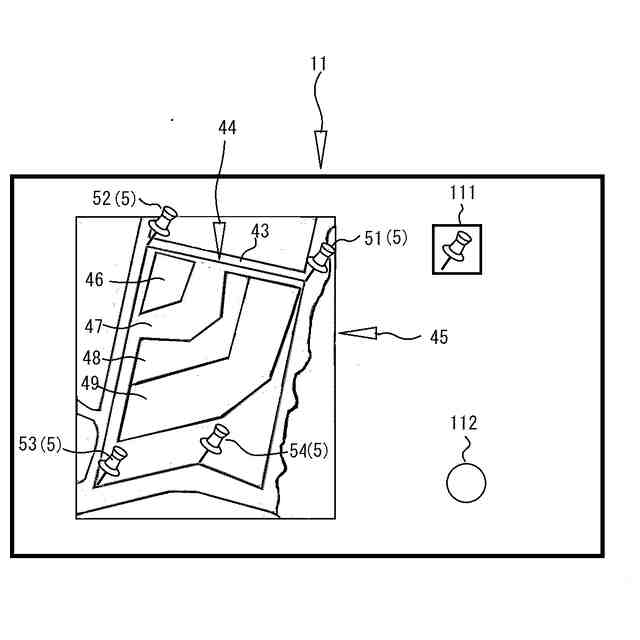
前記地点が、前記作業マップ内の圃場の角部などの作業者が地点を正確に認識できる特徴点であることを特徴とする請求項1記載の農作業用自動化システム。
【請求項3】
任意な地点は、3点以上あり、三角形以上の多角形を形成できる地点であることを特徴とする請求項1記載の自動化システム。
【請求項4】
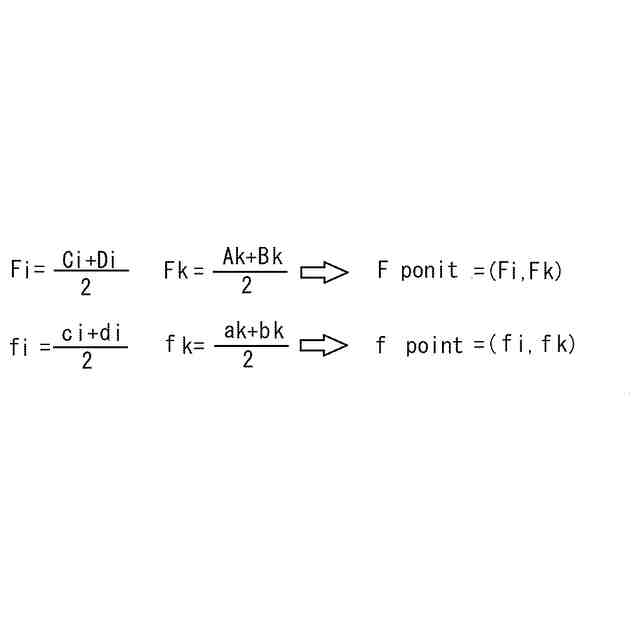
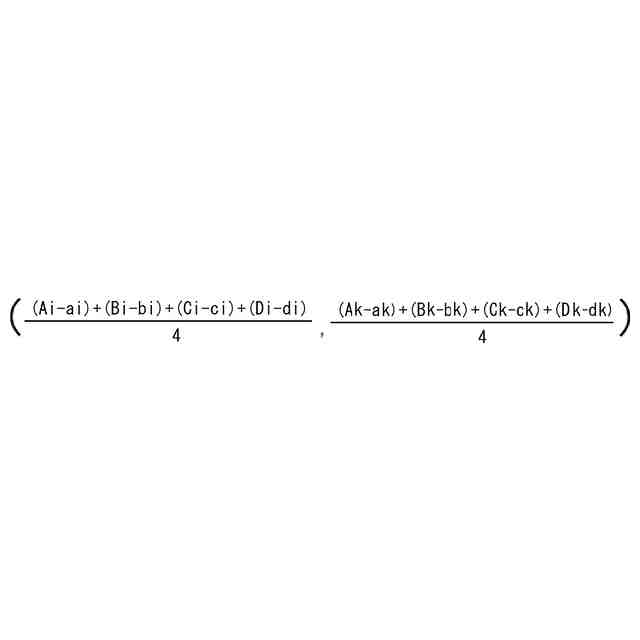
前記補正量は、3点以上の地点のずれ量からベクトルを求め補正量とすることを特徴とする請求項1記載の農作業用自動化システム。
【請求項5】
請求項1~4のいずれか1項記載の自動化システムを搭載した農業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、GIS(Geographic Information System(地理情報システム))ツールを使用したマップの補正システムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
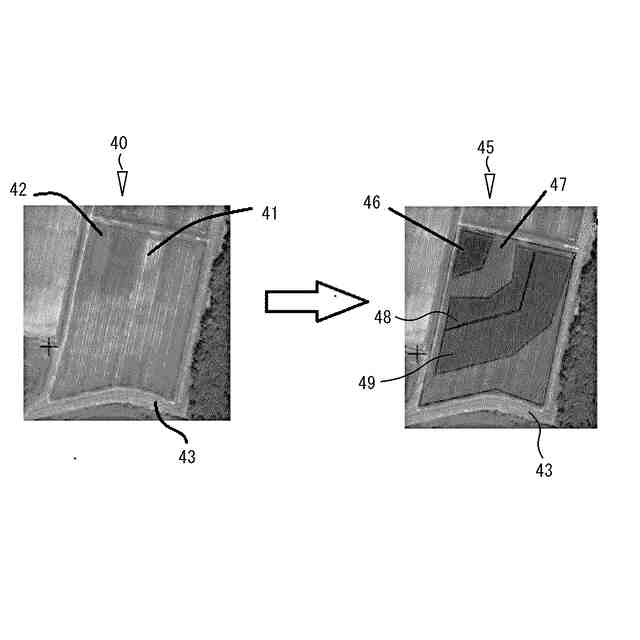
近年、リモートセンシング技術が発展し、施肥、病害虫防除用薬剤を圃場の必要とされる位置に散布する技術が実用化されている。例えば、特許文献1では、自動化システムが農業機械に搭載され、望む場所に散布が行われるように作業指令が農業機械に送られるようになっている。
そのために、特許文献1は、ヘリコプター、衛星を利用した画像から生育状況を分析することを開示している。その分析データは、GIS(Geographic Information System(地理情報システム))ツールによりインターネットなどで公開されている地図データの座標(緯度・経度)と紐づけられ、施肥マップなどと呼ばれる画像データを作成することが[0045]~[0048]に]記載されている。施肥マップは、座標(緯度・経度)と共に、施肥量を示す領域情報を有している。自動化システムは、施肥マップを利用して、所定の領域に農業機械が到達すると当該領域に決められた施肥量で施肥を行い、次の領域に農業機械が到達すると、別の決められた施肥量で施肥を行う。
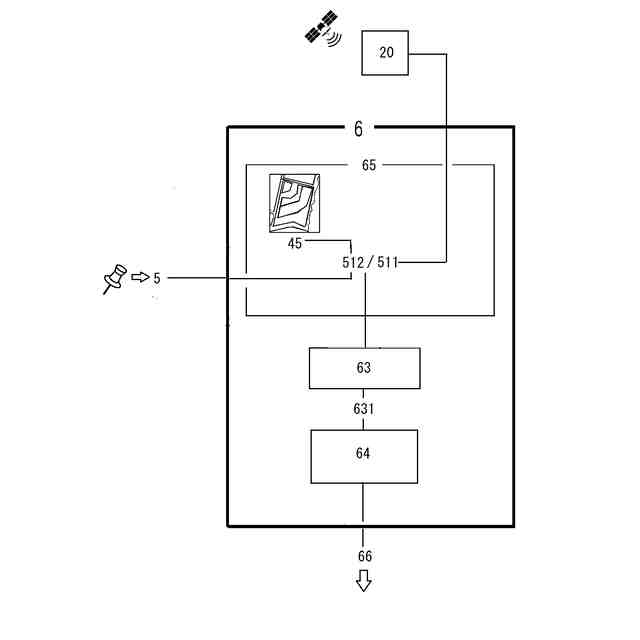
農業機械は、GNSS(Global Navigation Satellite System / 全球測位衛星システム)受信機などの測位手段を搭載しており、農業機械は、施肥マップが指定する座標(緯度・経度)のどの位置を走行しているのかを検出できるようになっている。
【先行技術文献】
【特許文献】
【0003】
特開2011-254711号公報
【非特許文献】
【0004】
Gigazine、「GPSの精度が高くなってもなぜGoogleマップの位置情報は精度が高くならないのか?」、2024年03月30日 18時00分、URL:https://gigazine.net/news/20240330-google-maps-tectonic-plates/
【発明の概要】
【発明が解決しようとする課題】
【0005】
以上の原理によれば、施肥マップの指定するとおりに施肥を行えば、衛星画像から生育が悪いと判断された領域には施肥量を多く、生育が良いと判断された領域には施肥量を少なく施肥でき、無駄な施肥を防ぐことができると共に、圃場全体の作物の生育を均一にすることができる。
ところが、農業機械に搭載されているGNSSを使用した正確な座標と、施肥マップの座標にずれが生じていることが判明した。原因は、インターネットなどで公開されている地図データの座標(緯度・経度)が正確でないことにある。
【0006】
非特許文献1には、次のようにその原因が詳細に説明されている。
「アメリカ地質調査所のケン・ハドナット氏によると、Googleマップでズレが生じるのは、GPSの精度だけではなく、地図の座標系を地理座標系に紐付けるジオリファレンスも原因といえるそうです。
たとえば、2008年に行われた研究で先進国の31都市におけるGoogle Earthの画像を調査したところ、1~50メートルの誤差があったことが明らかになりました。この誤差はGPSユニットの精度だけではなく、時間が経過してジオリファレンスにずれが生じたために発生した可能性が示されています。
地図は測量に基づいて作られています。しかし、測量を行う地面は不動のように思ってしまいますが、実際は目に見えないレベルで動き続けています。1960年代後半から提唱されているプレートテクトニクス説では、地球の表面は「プレート」と呼ばれる厚さ数十キロメートルほどの岩盤に覆われており、この岩盤が絶えず動き続けていると考えられています。
NGSは、北アメリカ大陸の測量のために「NAD83」という基準座標系を設定しています。このNAD83は北アメリカプレートの動きに合わせているため、北アメリカ大陸の測量士にとっては重要な座標系です。一方で、GPSでは地球全体の基準座標系である「WGS84」が使われています。
このNAD83とWGS84には数メートルの誤差が生じており、徐々にズレが生まれていることがわかっています。NAD83は地球の形状や大きさに対する知見を反映しておらず、地球の中心点の座標がWGS84から約2メートルずれているとのこと。NGSはNAD83の更新を2022年に行っていますが、それでも約1メートルのズレが残っているとのこと。
2011年に発生した東日本大震災では、GPSによってリアルタイムにプレートの動きが捉えられました。震源近くの海岸線は最大4メートル水平移動していることがわかっています。以下は、国土地理院のデータに基づいてカリフォルニア大学バークレー校の地学者であるロニー・グラペンシン氏が作成したムービーで、各地点の東西(Horizontal)方向と南北(vertical)方向でズレが生じたのかが地震発生からリアルタイムでまとめられています。」
【0007】
このように、我が国は地震が多く、地図データの座標(緯度・経度)は変化しやすい。
このような、正確でない地図データに基づいて施肥マップを作成しても、正確な施肥ができない。
【0008】
本発明の目的は、GISツールを使用したマップデータの座標または測位手段により測定した座標のいずれかを簡単に補正する手段を提供することにある。
【課題を解決するための手段】
【0009】
本発明の一態様は、作業マップと補正部を備え、前記作業マップは、作業予定の圃場の空撮画像、衛星画像等の実画像に基づいて領域を作成するとともに、前記領域と緯度・経度等の座標を含む地図データと紐づけたデータを含むものであり、前記補正部は、前記作業マップ内で自動または手動で任意な地点を指定でき、指定した前記地点の測位手段による座標データの入力を要求するものであり、入力された前記測位手段により測定された座標データと指定した前記地点の前記作業マップの座標データと比較して、ずれ量を算出し、前記ずれ量を補正量として、前記作業マップ上の全座標データを補正する、または、前記測位手段により測定される座標データを補正することを特徴とする農作業用自動化システムとすることで課題を解決した。
【発明の効果】
【0010】
本発明によれば、簡単に補正することができるようになった。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ