TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025177455
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024084308
出願日
2024-05-23
発明の名称
飛行体用回転支持装置
出願人
日本精工株式会社
代理人
弁理士法人貴和特許事務所
主分類
H02K
5/173 20060101AFI20251128BHJP(電力の発電,変換,配電)
要約
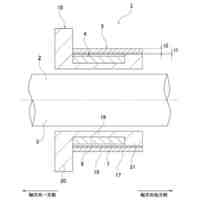
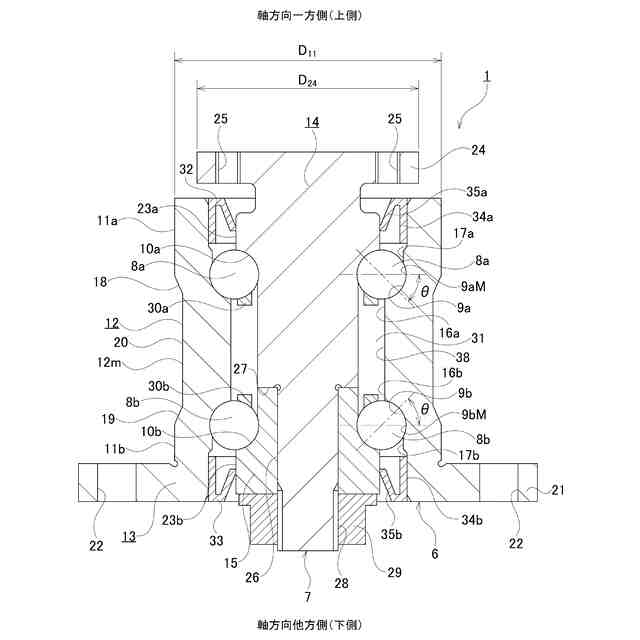
【課題】モータステータが外嵌固定される静止体の静止嵌合部を高精度に形成することが容易な飛行体用回転支持装置の構造を実現する。
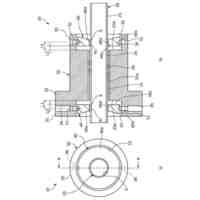
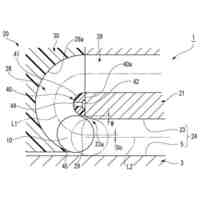
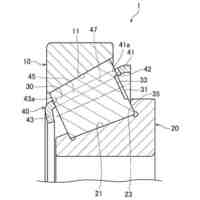
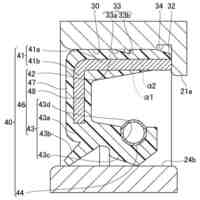
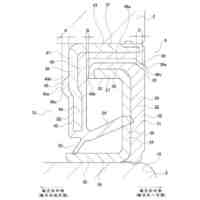
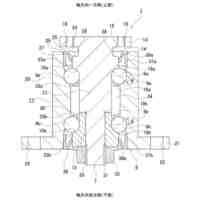
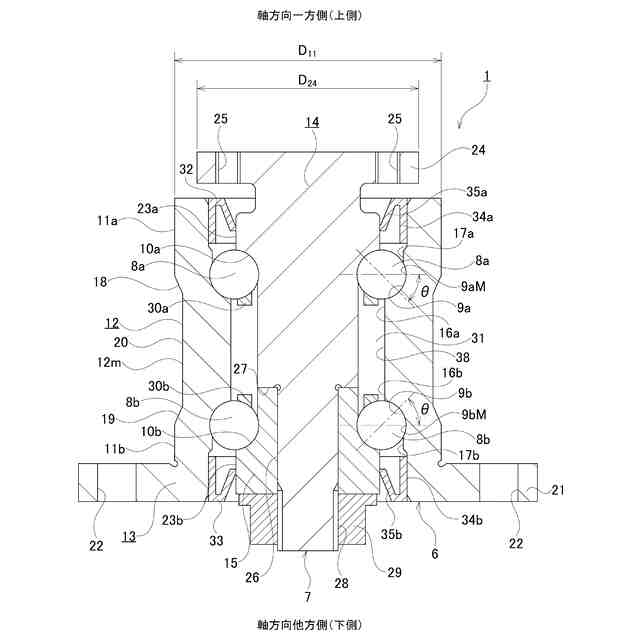
【解決手段】内周面に複列の外輪軌道9a、9bを有し、モータステータを支持可能な静止体6と、外周面に複列の内輪軌道10a、10bを有し、モータロータおよびプロペラを支持可能な回転体7と、複列の外輪軌道9a、9bと複列の内輪軌道10a、10bとの間に、それぞれの列ごとに複数個ずつ配置された転動体8a、8bとを備える。
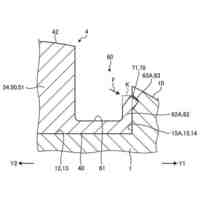
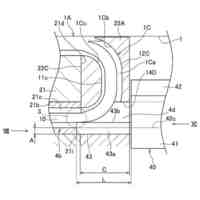
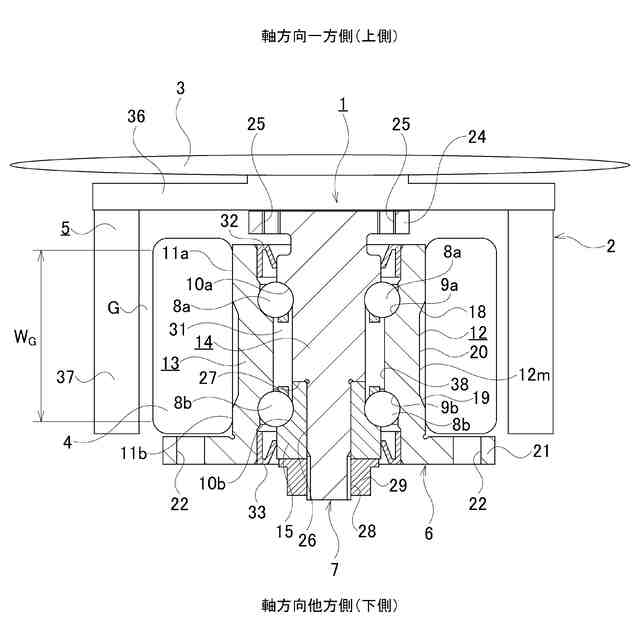
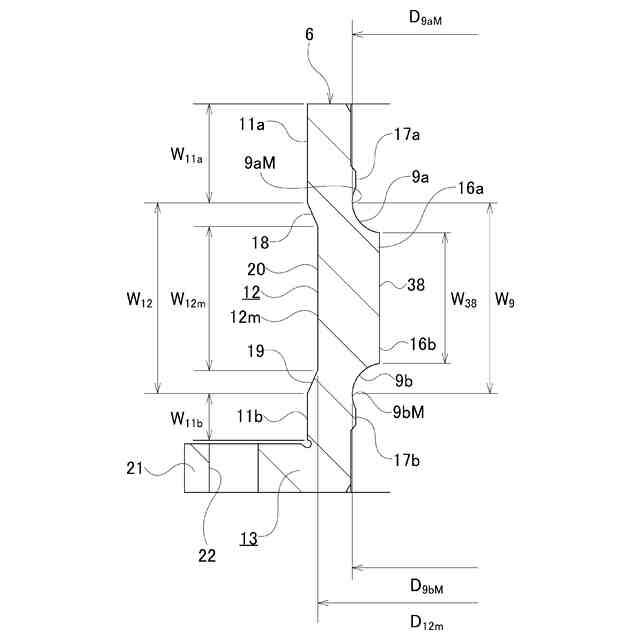
静止体6は、外周面の軸方向に離隔した複数箇所に、モータステータが圧入により外嵌される静止嵌合部11a、11bを有し、かつ、外周面のうち、軸方向に隣り合う2つの静止嵌合部11a、11bの間に位置する部分に、該静止嵌合部11a、11bの外径よりも小さい外径を有する逃げ部12を有する。
【選択図】図2
特許請求の範囲
【請求項1】
内周面に複列の外輪軌道を有し、モータステータを支持可能な静止体と、
外周面に複列の内輪軌道を有し、モータロータおよびプロペラを支持可能な回転体と、
前記複列の外輪軌道と前記複列の内輪軌道との間に、それぞれの列ごとに複数個ずつ配置された転動体と、を備え、
前記静止体は、外周面の軸方向に離隔した複数箇所に、前記モータステータが圧入により外嵌される静止嵌合部を有し、かつ、外周面のうち、軸方向に隣り合う2つの前記静止嵌合部の間に位置する部分に、該静止嵌合部の外径よりも小さい外径を有する逃げ部を有する、
飛行体用回転支持装置。
続きを表示(約 1,100 文字)
【請求項2】
前記複列の外輪軌道のうちの少なくとも1つの外輪軌道が前記静止体の内周面に直接形成されている、および/または、前記複列の内輪軌道のうちの少なくとも1つの内輪軌道が前記回転体の外周面に直接形成されている、請求項1に記載の飛行体用回転支持装置。
【請求項3】
前記複列の外輪軌道が前記静止体の内周面に直接形成されており、
前記逃げ部の最小径部の直径が、前記複列の外輪軌道の最大径部の直径よりも大きい、請求項1に記載の飛行体用回転支持装置。
【請求項4】
前記複列の外輪軌道が前記静止体の内周面に直接形成されており、
前記逃げ部の最小径部が前記複列の外輪軌道の最大径部から軸方向に外れた位置にのみ配置されている、
請求項1に記載の飛行体用回転支持装置。
【請求項5】
前記複列の外輪軌道が前記静止体の内周面に直接形成されており、
前記静止嵌合部は、軸方向に隣り合う、軸方向一方側の第1静止嵌合部と第2静止嵌合部とを含み、
前記第1静止嵌合部と前記第2静止嵌合部との間に位置する前記逃げ部が、前記静止体の内周面のうち前記複列の外輪軌道の間に位置する部分である列間部と径方向に重畳して配置されている、
請求項1に記載の飛行体用回転支持装置。
【請求項6】
前記逃げ部の軸方向幅が前記列間部の軸方向幅以上であり、前記列間部の全体が前記逃げ部と径方向に重畳している、請求項5に記載の飛行体用回転支持装置。
【請求項7】
前記複列の外輪軌道のうち軸方向一方側の外輪軌道の少なくとも一部が、前記第1静止嵌合部と径方向に重畳して配置され、かつ、前記複列の外輪軌道のうち軸方向他方側の外輪軌道の少なくとも一部が、前記第2静止嵌合部と径方向に重畳して配置されている、請求項5に記載の飛行体用回転支持装置。
【請求項8】
前記逃げ部の最小径部が、前記複列の外輪軌道のうち軸方向一方側の外輪軌道の最大径部よりも軸方向他方側、かつ、前記複列の外輪軌道のうち軸方向他方側の外輪軌道の最大径部よりも軸方向一方側に配置されている、請求項7に記載の飛行体用回転支持装置。
【請求項9】
前記回転体は、前記静止体よりも軸方向一方側に位置する部分から径方向外側に向けて突出し、前記モータロータおよび前記プロペラが結合される回転フランジを有し、
前記回転フランジの外径が、前記静止嵌合部の外径よりも小さい、
請求項1に記載の飛行体用回転支持装置。
【請求項10】
前記静止体は、前記静止嵌合部よりも軸方向他方側に位置する部分に径方向外側に向けて突出した静止フランジを有する、請求項1に記載の飛行体用回転支持装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、飛行体のプロペラおよび駆動用モータを支持するための飛行体用回転支持装置に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
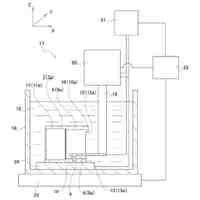
ドローンなどの飛行体は、機体フレームと、上向きの揚力を得るためのプロペラと、機体フレームに対してプロペラを回転可能に支持し、かつ、該プロペラを回転駆動するための飛行体用回転駆動装置とを備える。
【0003】
特開2020-072530号公報などに記載されているように、従来構造の飛行体用回転駆動装置は、静止体、回転体、および軸受を含んで構成される飛行体用回転支持装置と、モータステータおよびモータロータを含んで構成される駆動用モータとを備える。
【0004】
前記静止体は、内周面を有し、飛行体の機体フレームに支持固定される。
【0005】
前記回転体は、外周面を有し、前記静止体に対し、前記軸受を介して、上下方向を向いた中心軸を中心とする回転を自在に支持される。
【0006】
前記軸受は、前記静止体の内周面と前記回転体の外周面との間に、軸方向に離隔して配置された1対の単列玉軸受により構成される。前記1対の単列玉軸受を構成するそれぞれの単列玉軸受は、外輪と内輪と玉とを備え、前記外輪の外周面を前記静止体の内周面に内嵌し、かつ、前記内輪の内周面を前記回転体の外周面に外嵌する態様で、前記静止体と前記回転体との間に組み付けられる。
【0007】
前記モータステータは、磁性材製のコアおよび該コアに巻き付けたコイルを含み、全体を円筒状に構成され、その外周面である前記コアの外周面の円周方向等間隔複数箇所に磁極を有する。前記モータステータは、前記静止体の外周面に備えられた、軸方向の全長にわたり連続した円筒面状の静止嵌合部に外嵌固定される。
【0008】
前記モータロータは、前記モータステータの外周面と径方向に対向する内周面を有し、該内周面の円周方向等間隔複数箇所に、S極とN極とが円周方向に関して交互に配置されている。前記モータロータは、前記回転体の軸方向一方側(上側)の端部に支持固定される。
【0009】
飛行体のプロペラは、その回転中心軸が前記回転体の中心軸に一致するように、前記回転体の軸方向一方側の端部のうち前記モータロータよりも軸方向一方側に位置する部分に支持固定される。
【0010】
この状態で、前記モータステータの前記コイルに通電がなされると、該モータステータに対して前記モータロータを回転させるトルク(電磁力)が発生して、前記プロペラが該モータロータとともに回転駆動される。
【先行技術文献】
【特許文献】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精工株式会社
搬送装置
10日前
日本精工株式会社
ボールねじ
3日前
日本精工株式会社
ボールねじ
19日前
日本精工株式会社
ボールねじ
2か月前
日本精工株式会社
リニアガイド
12日前
日本精工株式会社
温度検出装置
1か月前
日本精工株式会社
アクチュエータ
1か月前
日本精工株式会社
転がり案内装置
2か月前
日本精工株式会社
円すいころ軸受
1か月前
日本精工株式会社
ボールねじ装置
18日前
日本精工株式会社
ボールねじ装置
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
ハブユニット軸受
3か月前
日本精工株式会社
ハブユニット軸受
3日前
日本精工株式会社
逆入力遮断クラッチ
1か月前
日本精工株式会社
磁歪式トルクセンサ
2か月前
日本精工株式会社
環境配慮型機械部品
1か月前
日本精工株式会社
モータ制御システム
2か月前
日本精工株式会社
直動案内装置の仮軸
3日前
日本精工株式会社
磁歪式トルクセンサ
2か月前
日本精工株式会社
回転センサ一体型軸受
18日前
日本精工株式会社
飛行体用回転支持装置
3日前
日本精工株式会社
飛行体用回転支持装置
3日前
日本精工株式会社
直動案内装置の組立方法
2か月前
日本精工株式会社
アクチュエータシステム
2か月前
日本精工株式会社
ラジアルころ軸受用保持器
1か月前
日本精工株式会社
ボールねじ部品の製造方法
2か月前
日本精工株式会社
センサ付き転がり軸受装置
10日前
日本精工株式会社
ハブユニット軸受の製造方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ