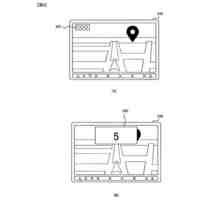
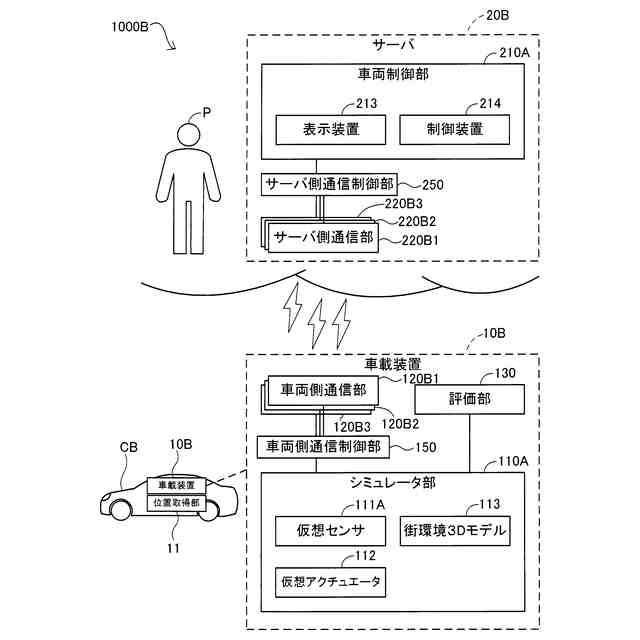
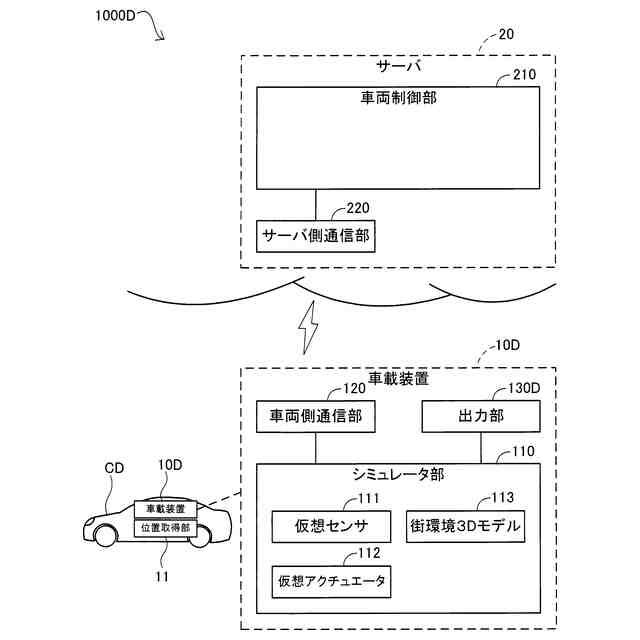
発明の詳細な説明【技術分野】 【0001】 本発明は、シミュレータシステム、及び、シミュレーション方法に関する。 続きを表示(約 2,800 文字)【背景技術】 【0002】 近年、次世代移動体通信であるBeyond5G(B5G)や、6Gの研究開発が活発に行われている。このような次世代移動体通信を利用することで、遠隔運転システムや、遠隔自動運転システムのような、今まで実現できなかったコネクティッドサービスを実現できる可能性がある。ここで、遠隔運転システムとは、遠隔地にいる運転者が、車両から送信された映像や位置情報等に基づいて、外部から車両を手動で制御するシステムを指す。また、遠隔自動運転システムとは、クラウドやエッジサーバが、車両から送信された映像や位置情報等に基づいて、自動運転を行うシステムを指す。以降、遠隔運転システムや遠隔自動運転システムのように、ネットワークを介して、車両のような対象デバイスを制御するサービスや、対象デバイスにおいて使用される何らかの情報を提供するサービスを総称して「次世代コネクティッドサービス」とも呼ぶ。 【0003】 例えば、特許文献1には、遠隔オペレータによる遠隔操作の対象である移動体と、遠隔オペレータ側の遠隔オペレータ端末とを備える遠隔運転システムが開示されている。例えば、非特許文献1には、実車を用いた遠隔運転システムが開示されている。「実車」とは、現実世界に配置された実際の車両を意味する。例えば、非特許文献2には、仮想車両を用いた遠隔運転システム向けの通信評価が開示されている。「仮想車両」とは、仮想世界において実現された、換言すれば、仮想世界に配置された仮想的な車両を意味する。 【先行技術文献】 【特許文献】 【0004】 特開2023-169715号公報 【非特許文献】 【0005】 Ericsson, Deutsche Telekom and Vay、"Ericsson, Deutsche Telekom and Vay show live teledrive technology demo with 5G"、[online]、2023年2月22日、[令和6年4月3日検索]、インターネット<URL:https://www.ericsson.com/en/news/2023/2/ericsson-dt-and-vay-demo-5g-teledriving> Stefan Neumeier, Ermias Andargie Walelgne, Vaibhav Bajpai, Jorg Ott, and Christian Facchi、"Measuring the Feasibility of Teleoperated Driving in Mobile Networks"、[online]、2019年6月19日、[令和6年4月3日検索]、インターネット<URL:https://ieeexplore.ieee.org/document/8784466> 【発明の概要】 【発明が解決しようとする課題】 【0006】 上述した次世代コネクティッドサービスでは、車両と、車両を制御するための制御データを生成する制御装置(運転者や、エッジサーバ)との間で、絶えず通信する必要がある。このため、次世代コネクティッドサービスでは、車両と制御装置との間の通信を実現するネットワークの接続性と、安定性とが求められる。ここで、「ネットワークの接続性」とは、ネットワークへの繋がりやすさ、すなわち信頼性を意味し、「接続性が高い」とは、信頼性が高い、すなわち障害に強いことを意味する。また、「ネットワークの安定性」とは、ネットワークにおける通信品質の安定性を意味し、「安定性が高い」とは、通信品質が高いことを意味する。 【0007】 特許文献1に記載の技術では、遠隔オペレータ側の端末に搭載したシミュレータを用いて、ネットワークの通信遅延や通信途絶による情報欠落を補正することで、遠隔運転オペレータの操作への違和感を抑制している。しかし、特許文献1に記載の技術では、車両と制御装置との間の通信を実現するネットワークを評価することについて何ら考慮されていない。非特許文献1に記載の技術では、実車を用いた遠隔運転システムを作成することにフォーカスしており、車両と制御装置との間の通信を実現するネットワークにおける通信環境は限定的、すなわち理想的な条件の通信環境であって、現実に即していない。非特許文献2に記載の技術では、車両と制御装置との間の通信を実現するネットワークにおける通信条件(通信遅延、スループット)を仮定している。しかし、実際の通信では、ジッタの影響でカメラ画像にブロックノイズが乗る状況や、瞬時的なスループットの増減で映像の品質が低下し、遠隔運転に適さない画像クオリティになる状況等が考えられるため、通信条件だけで遠隔運転システム(あるいは遠隔自動運転システム)が成立すると判断することはできない。なお、このような課題は、コネクティッドサービスの対象となる対象デバイスとして、遠隔運転システムや遠隔自動運転システムの例で示した車両を用いる場合に限らず、ロボット、ドローン等の任意のデバイスを用いる場合に共通する。また、このような課題は、次世代移動体通信であるB5Gや6Gを使用してコネクティッドサービスを構築する場合に限らず、任意の通信システムを利用してコネクティッドサービスを構築する場合に共通する。 【0008】 本発明は、上述した課題の少なくとも一部を解決するためになされたものであり、実車の実際の走行環境下において、遠隔運転システムや遠隔自動運転システムを評価可能な技術を提供することを目的とする。 【課題を解決するための手段】 【0009】 本発明は、上述した課題の少なくとも一部を解決するためになされたものであり、以下の形態として実現することが可能である。 【0010】 (1)本発明の一形態によれば、シミュレータシステムが提供される。このシミュレータシステムは、現実世界に配置された実際の車両である実車と、前記現実世界を再現した仮想世界と、前記仮想世界に配置された仮想的な車両である仮想車両と、を実現するシミュレータ部と、前記仮想車両を走行させるための制御データを生成する車両制御部と、前記シミュレータ部と、前記車両制御部との間の通信を実現する通信部と、前記実車の移動軌跡と、前記仮想車両の移動軌跡とを出力する出力部と、を備え、前記シミュレータ部は、前記実車に搭載されており、前記車両制御部は、前記仮想車両が前記実車に追従して走行するための前記制御データを生成し、前記シミュレータ部に送信する。 (【0011】以降は省略されています) この特許をJ-PlatPat(特許庁公式サイト)で参照する

 特許ウォッチ
特許ウォッチ