TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025173627
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2024079247
出願日
2024-05-15
発明の名称
制御装置及び制御方法
出願人
シンフォニアテクノロジー株式会社
代理人
個人
主分類
G05B
11/36 20060101AFI20251120BHJP(制御;調整)
要約
【課題】制約条件から外れないように、インプットシェイピング制御により発生する遅れ時間を短縮する制御装置または制御方法を実現する。
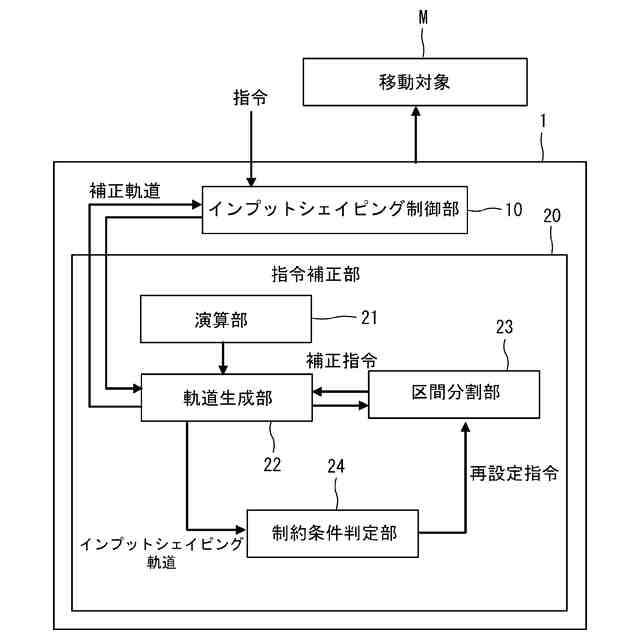
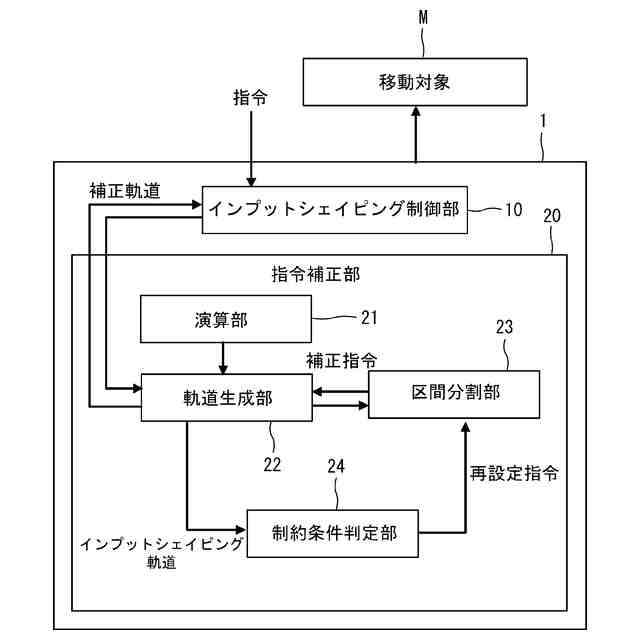
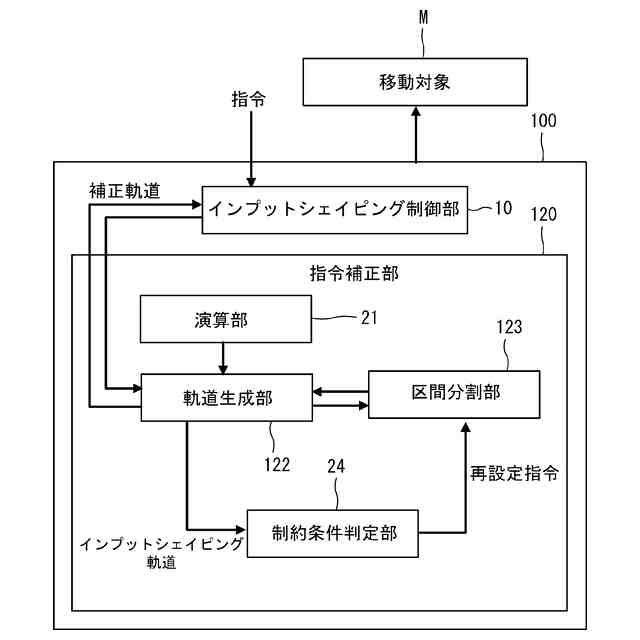
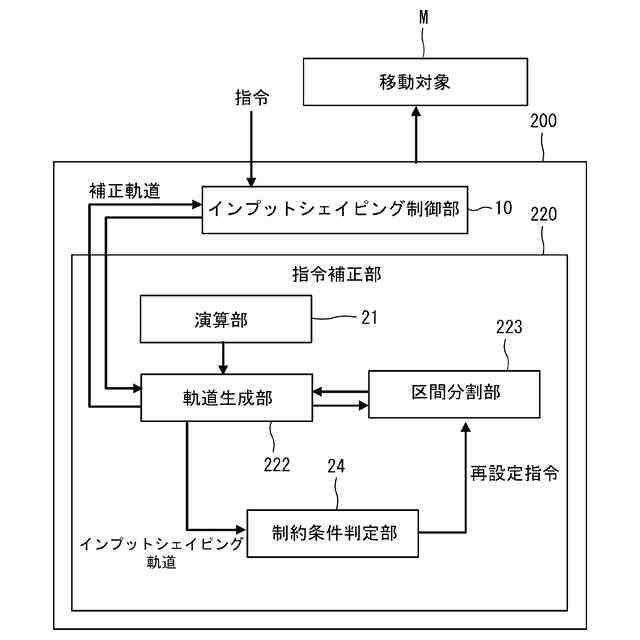
【解決手段】制御装置1は、指令に基づいて、移動対象Mを移動させるように駆動制御する装置である。制御装置1は、移動対象Mが移動する際に発生する振動を低減するように前記指令に対してインプットシェイピング制御を行うインプットシェイピング制御部10と、インプットシェイピング制御部10によって得られたインプットシェイピング制御指令に基づいて駆動制御された移動対象Mが移動する際に描くインプットシェイピング軌道における遅れ時間の少なくとも一部を短縮するように、前記指令に基づいて移動対象Mが移動する際に描く軌道を分割して得られる複数の区間のうち移動対象Mを移動させる際の制約条件を満たす少なくとも一つの区間において、前記指令を補正する指令補正部20と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
指令に基づいて、移動対象を移動させるように駆動制御する制御装置であって、
前記移動対象が移動する際に発生する振動を低減するように前記指令に対してインプットシェイピング制御を行うインプットシェイピング制御部と、
前記インプットシェイピング制御部によって得られたインプットシェイピング制御指令に基づいて駆動制御された前記移動対象が移動する際に描くインプットシェイピング軌道における遅れ時間の少なくとも一部を短縮するように、前記指令に基づいて前記移動対象が移動する際に描く軌道を分割して得られる複数の区間のうち前記移動対象を移動させる際の制約条件を満たす少なくとも一つの区間において、前記指令を補正する指令補正部と、
を有する、
制御装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の制御装置において、
前記指令補正部は、前記複数の区間のうち前記制約条件を満たす少なくとも一つの区間に対して、前記遅れ時間の少なくとも一部の配分を調整し、配分調整された時間を短縮するように、前記指令を補正する、
制御装置。
【請求項3】
請求項1に記載の制御装置において、
前記指令補正部は、
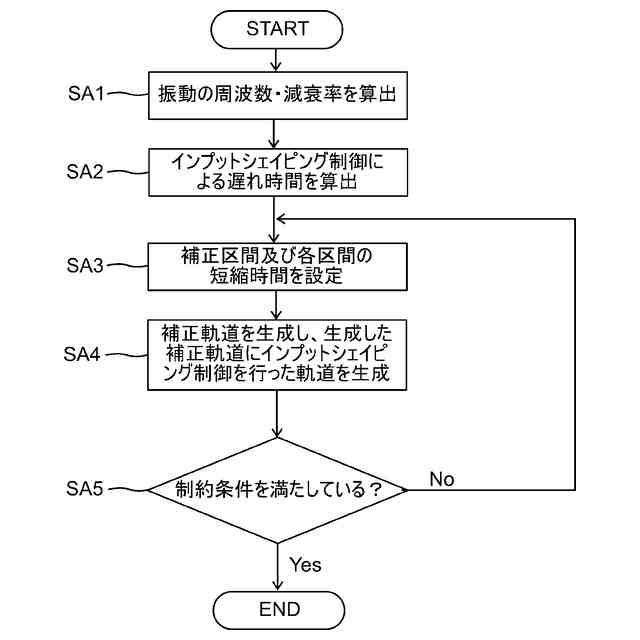
前記指令に対する最初の補正では、前記移動対象の軌道の全区間において、前記遅れ時間の少なくとも一部を短縮するように、前記指令を補正し、
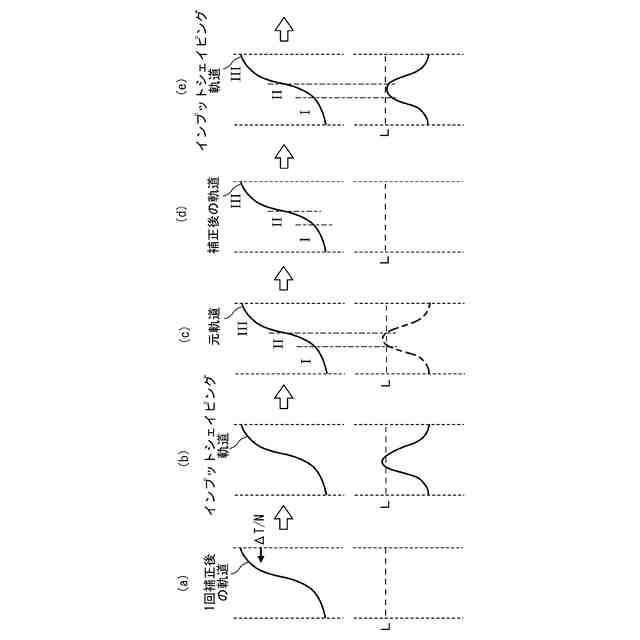
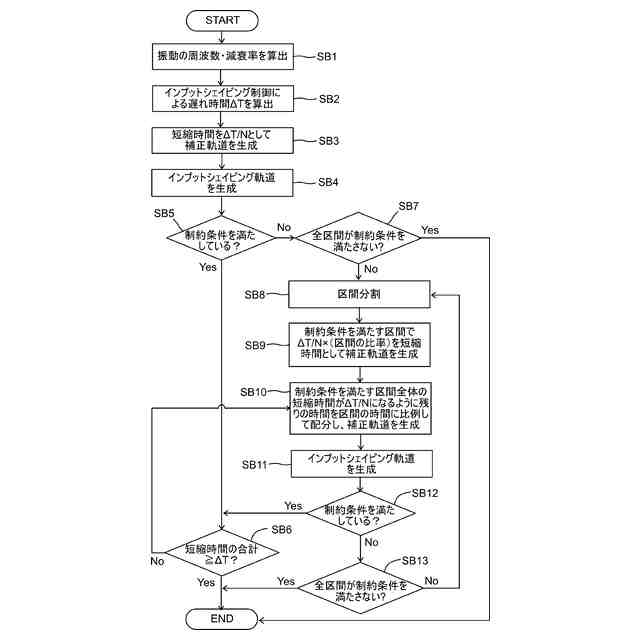
補正後の指令を用いて前記インプットシェイピング制御部によって得られたインプットシェイピング制御指令に基づいて駆動制御された前記移動対象のインプットシェイピング軌道が前記制約条件を満たしていない場合には、前記移動対象の軌道を、前記制約条件を満たしているかどうかによって複数の区間に分割し、
分割された複数の区間のうち前記制約条件を満たしている区間において、前記遅れ時間の一部を短縮するように、前記指令を補正する、
制御装置。
【請求項4】
請求項1に記載の制御装置において、
前記指令補正部は、短縮した時間の合計が前記遅れ時間に達するまで、前記移動対象のインプットシェイピング軌道が前記制約条件を満たしているかどうかに応じた区間分割と、前記制約条件を満たしている区間において前記遅れ時間の一部を短縮するような前記指令の補正とを繰り返し行う、
制御装置。
【請求項5】
指令に応じて、移動対象を移動させるように駆動制御する制御方法であって、
前記移動対象の移動時に発生する振動を低減するように前記指令に対してインプットシェイピング制御を行うインプットシェイピング制御ステップと、
前記インプットシェイピング制御ステップによって得られたインプットシェイピング制御指令に基づいて駆動制御された前記移動対象が移動する際に描くインプットシェイピング軌道における遅れ時間の少なくとも一部を短縮するように、前記指令に基づいて前記移動対象が移動する際に描く軌道を分割して得られる複数の区間のうち前記移動対象を移動させる際の制約条件を満たす少なくとも一つの区間において、前記指令を補正する指令補正ステップと、
を有する、
制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、指令に応じて、移動対象を軌道に沿って移動させるように駆動制御する制御装置及び制御方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
指令に応じて、移動対象を軌道に沿って移動させるように駆動制御する制御装置または制御方法が知られている。このような制御方法として、例えば特許文献1には、システムに対して、好ましくない動特性を最小にする入力を発生する方法が開示されている。
【0003】
前記特許文献1の方法は、ダイナミックシステムの自然周波数における振動を除去するインパルスシーケンスを決定すること、およびインパルスシーケンスを任意の指令入力と重畳させること、を含んでいる。前記特許文献1の方法は、ダイナミックシステムへの任意の指令入力を、終端点の振動を低減するように整形するのに適している。
【先行技術文献】
【特許文献】
【0004】
特許3015396号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、前記特許文献1の方法では、インパルス入力によって生じる振動に対し、発生した振動の半周期後に第2のインパルス入力を加えることにより、振動を打ち消している。このような制御方法は、いわゆるインプットシェイピング制御として知られている。
【0006】
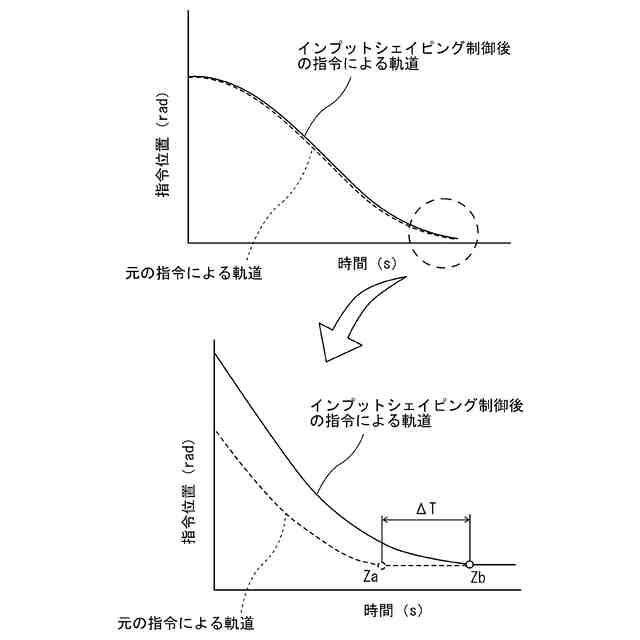
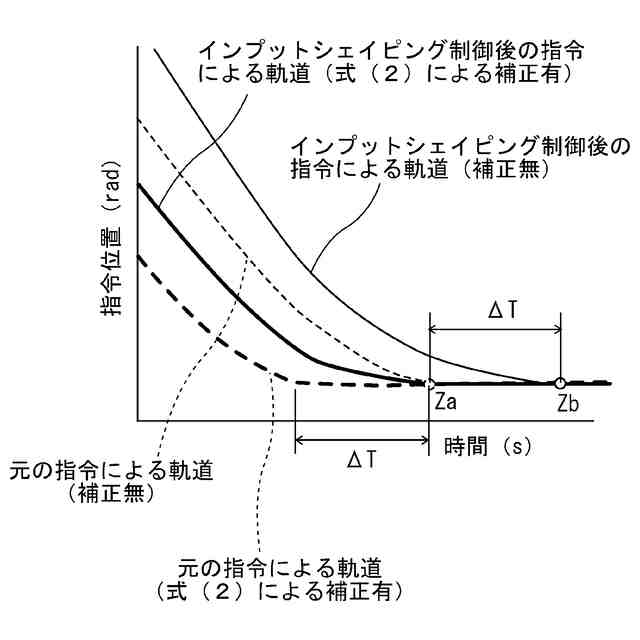
前記インプットシェイピング制御では、入力される指令に対して、振動周波数の半周期分だけ前記指令を遅らせる処理を行う。そのため、前記インプットシェイピング制御を適用すると、遅れ時間の発生によるスループットの低下、及び、制約条件下での最適設計から外れるという問題が生じる。
【0007】
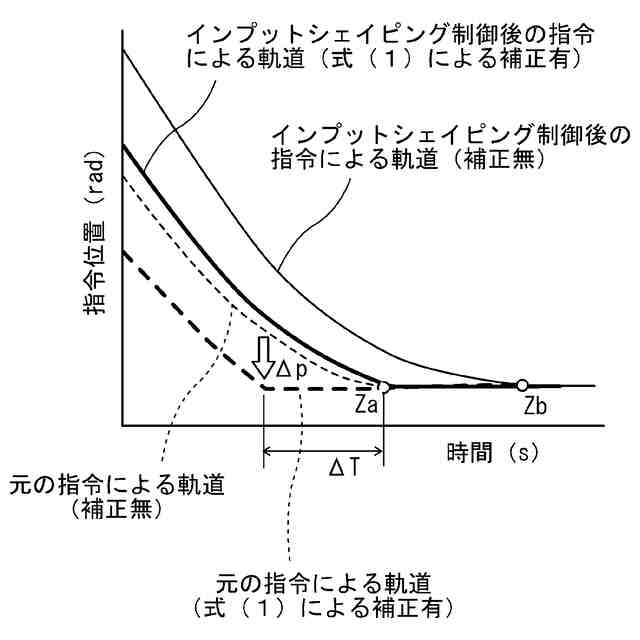
これに対し、前記インプットシェイピング制御後の指令に対して補正を行うことが考えられる。しかしながら、この場合には、インプットシェイピング制御による振動低減効果に影響するため好ましくない。
【0008】
したがって、制約条件から外れないように、インプットシェイピング制御により発生する遅れ時間を短縮する制御が求められている。
【0009】
本発明の目的は、制約条件から外れないように、インプットシェイピング制御により発生する遅れ時間を短縮する制御装置または制御方法を実現することにある。
【課題を解決するための手段】
【0010】
本発明の一実施形態に係る制御装置は、指令に基づいて、移動対象を移動させるように駆動制御する装置である。前記制御装置は、前記移動対象が移動する際に発生する振動を低減するように前記指令に対してインプットシェイピング制御を行うインプットシェイピング制御部と、前記インプットシェイピング制御部によって得られたインプットシェイピング制御指令に基づいて駆動制御された前記移動対象が移動する際に描くインプットシェイピング軌道における遅れ時間の少なくとも一部を短縮するように、前記指令に基づいて前記移動対象が移動する際に描く軌道を分割して得られる複数の区間のうち前記移動対象を移動させる際の制約条件を満たす少なくとも一つの区間において、前記指令を補正する指令補正部と、を有する(第1の構成)。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ