TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025172863
公報種別
公開特許公報(A)
公開日
2025-11-26
出願番号
2025141799,2023202283
出願日
2025-08-27,2019-06-13
発明の名称
ロボットおよびその制御方法、ならびにプログラム
出願人
GROOVE X株式会社
代理人
主分類
G05D
1/244 20240101AFI20251118BHJP(制御;調整)
要約
【課題】利用者がロボットの移動を制御できる、ロボットおよびその制御方法、ならびにプログラムを提供する。
【解決手段】ロボットは、移動機構と、周囲の空間を撮影する撮影部と、撮影部において撮影された撮影画像に含まれる所定のマーカを認識するマーカ認識部と、認識されたマーカに基づき移動機構による移動を制御する移動制御部とを備える。
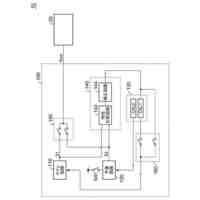
【選択図】図1
特許請求の範囲
【請求項1】
移動機構と、
周囲の空間を撮影する撮影部と、
前記撮影部において撮影された撮影画像に含まれる所定のマーカを認識するマーカ認識部と、
認識された前記マーカに基づき前記移動機構による移動を制御する移動制御部と
を備える、ロボット。
続きを表示(約 720 文字)
【請求項2】
前記移動制御部は、認識された前記マーカに基づき前記移動による進入を禁止する、請求項1に記載のロボット。
【請求項3】
前記移動制御部は、認識された前記マーカに基づき前記移動の速度を制限する、請求項1又は2に記載のロボット。
【請求項4】
前記移動制御部は、認識された前記マーカの設置位置に基づき前記移動を制御する、請求項1から3のいずれか一項に記載のロボット。
【請求項5】
前記移動制御部は、前記設置位置に基づく制限範囲を設定し、前記制限範囲における前記移動を制限する、請求項4に記載のロボット。
【請求項6】
前記移動制御部は、前記設置位置より奥側、又は前記設置位置の周囲における所定の範囲を前記制限範囲として設定する、請求項5に記載のロボット。
【請求項7】
前記移動制御部は、認識された前記マーカが複数である場合、認識された複数の前記設置位置に基づき前記移動を制限する、請求項4から6のいずれか一項に記載のロボット。
【請求項8】
前記移動制御部は、認識された第1マーカの設置位置と認識された第2マーカの設置位置とを結ぶ線分に基づき前記移動を制限する、請求項7に記載のロボット。
【請求項9】
前記移動制御部は、認識された前記マーカの種類に基づき前記移動を制御する、請求項1から8のいずれか一項に記載のロボット。
【請求項10】
前記移動制御部は、記録されているマーカに基づき前記移動を制御する、請求項1から9のいずれか一項に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットおよびその制御方法、ならびにプログラムに関する。
続きを表示(約 980 文字)
【背景技術】
【0002】
従来から、家屋内を自律的に移動しながらカメラで画像を撮影し、撮影画像から屋内の空間を認識し、認識している空間に基づき移動経路を設定して屋内を移動するロボットがある。ロボット移動経路の設定は、ロボットが移動する経路を定めたマップを利用者が予め作成することにより行われる。ロボットは作成されたマップに基づき定められた経路を移動することができる(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-103277号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、自律行動型ロボットにおいては、ロボットが空間を自律的に移動できるため、例えば、利用者が進入して欲しくない範囲やロボットが移動すると危険な範囲にロボットが進入することがある。
【0005】
また、自律的な移動だけでなく、所定の場所へロボットを移動させて、所定のアクションを行わせたいこともある。
【0006】
本発明は上記事情に鑑みてなされたものであり、1つの実施形態において、利用者がロボットの移動を制御できる、ロボットおよびその制御方法、ならびにプログラムを提供することを一つの目的とする。
【課題を解決するための手段】
【0007】
(1)上記の課題を解決するため、実施形態のロボットは、移動機構と、周囲の空間を撮影する撮影部と、前記撮影部において撮影された撮影画像に含まれる所定のマーカを認識するマーカ認識部と、認識された前記マーカに基づき前記移動機構による移動を制御する移動制御部とを備える。
【0008】
(2)また、実施形態のロボットにおいて、前記移動制御部は、認識された前記マーカに基づき前記移動による進入を禁止する。
【0009】
(3)また、実施形態のロボットにおいて、前記移動制御部は、認識された前記マーカに基づき前記移動の速度を制限する。
【0010】
(4)また、実施形態のロボットにおいて、前記移動制御部は、認識された前記マーカの設置位置に基づき前記移動を制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
3か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
2か月前
株式会社熊谷組
障害物の検出方法
1か月前
ローム株式会社
基準電圧源
2か月前
愛知製鋼株式会社
車両用システム
3か月前
個人
作業車両自動化システム
3か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1日前
新電元工業株式会社
作業用ロボット
1か月前
豊田合成株式会社
機器制御装置
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
4か月前
ローム株式会社
半導体集積回路
2日前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
生産管理システム
4か月前
トヨタ自動車株式会社
移動制御システム
3か月前
株式会社ダイフク
搬送設備
2か月前
株式会社アサヒエンタープライズ
調整弁
17日前
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
減圧弁
3か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
9日前
トヨタ自動車株式会社
制御装置
2か月前
キヤノン株式会社
配送システム
2か月前
トヨタ自動車株式会社
クラッチペダル
3か月前
カヤバ株式会社
減圧弁
1か月前
マーク ヘイリー
消防ロボット
4か月前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
株式会社アマダ
工作機械制御装置
1か月前
村田機械株式会社
搬送車システム
1か月前
キヤノン電子株式会社
加工システム、及び、加工装置
3か月前
アズビル株式会社
制御システムおよび制御方法
4か月前
ルネサスエレクトロニクス株式会社
半導体装置
3か月前
キヤノン電子株式会社
加工システム、及び、加工装置
3か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ