TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025171301
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024076495
出願日
2024-05-09
発明の名称
センサシステム、移動体、および、アームレスト装置
出願人
豊田合成株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B60N
2/75 20180101AFI20251113BHJP(車両一般)
要約
【課題】アームレストへの運転者の寄りかかりを検知する。
【解決手段】センサシステムは、移動体の運転者の少なくとも腕部を支持可能なアームレスト部に設けられ、運転者によってアームレスト部に加えられる荷重と、アームレスト部への運転者の接触面積と、の少なくとも一方に関するセンサ値を検出可能に構成されたセンサ部と、制御部と、を備える。制御部は、運転者による移動体の操舵が要求される場合に、センサ値を用いて、アームレスト部への運転者の寄りかかりを検知し、寄りかかりが検知された場合に、運転者に対する警告を実行する。
【選択図】図1
特許請求の範囲
【請求項1】
センサシステムであって、
移動体の運転者の少なくとも腕部を支持可能なアームレスト部に設けられ、前記運転者によって前記アームレスト部に加えられる荷重と、前記アームレスト部への前記運転者の接触面積と、の少なくとも一方に関するセンサ値を検出可能に構成されたセンサ部と、
制御部と、を備え、
前記制御部は、
前記運転者による前記移動体の操舵が要求される場合に、前記センサ値を用いて、前記アームレスト部への前記運転者の寄りかかりを検知し、
前記寄りかかりが検知された場合に、前記運転者に対する警告を実行する、
センサシステム。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載のセンサシステムであって、
前記センサ部は、前記センサ値として、前記運転者によって前記アームレスト部の上面に加えられる荷重と、前記上面への前記運転者の接触面積と、の少なくとも一方に関する値を検出可能に構成されている、センサシステム。
【請求項3】
請求項2に記載のセンサシステムであって、
前記センサ部は、前記アームレスト部のうち前記上面を含む上面部分に設けられる、センサシステム。
【請求項4】
請求項1に記載のセンサシステムであって、
前記センサ部は、前記センサ値として、前記アームレスト部の側面であって、前記運転者によって前記運転者が着座する運転座席側の側面に加えられる荷重と、前記側面への前記運転者の接触面積と、の少なくとも一方に関する値を検出可能に構成されている、センサシステム。
【請求項5】
請求項4に記載のセンサシステムであって、
前記センサ部は、前記アームレスト部のうち前記側面を含む側面部分に設けられる、センサシステム。
【請求項6】
請求項1に記載のセンサシステムであって、
前記制御部は、前記警告において、前記アームレスト部と、前記運転者が着座する運転座席と、の少なくとも一方を振動させる、センサシステム。
【請求項7】
請求項1に記載のセンサシステムであって、
前記制御部は、予め定められた基準期間以上、前記センサ値が予め定められた閾値以上である場合に、前記寄りかかりを検知する、センサシステム。
【請求項8】
請求項1に記載のセンサシステムであって、
前記センサ部は、前記センサ値として、前記センサ部と前記運転者との間の静電容量を検出する静電容量センサとして構成されている、センサシステム。
【請求項9】
請求項1から8までのいずれか一項に記載のセンサシステムと、
前記アームレスト部と、を備える、移動体。
【請求項10】
アームレスト装置であって、
移動体の運転者の少なくとも腕部を支持可能に構成された支持部と、
前記支持部に設けられ、前記支持部に加えられる荷重と、前記支持部への前記運転者の接触面積と、の少なくとも一方に関するセンサ値を検出可能に構成されたセンサ部と、
制御部と、を備え、
前記制御部は、
前記運転者による前記移動体の操舵が要求される場合に、前記センサ値を用いて、前記支持部への前記運転者の寄りかかりを検知し、
前記寄りかかりが検知された場合に、前記運転者に対する警告を実行する、
アームレスト装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、センサシステム、移動体、および、アームレスト装置に関する。
続きを表示(約 3,700 文字)
【背景技術】
【0002】
特許文献1には、車両用シートに搭載されたセンサによって乗員の有無を検出する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2007-210440号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の技術では、移動体の運転者の姿勢を検出することについては具体的に検討されていない。運転者による移動体の操舵が要求されない場合、運転者は、操舵に適さない姿勢を含む種々の姿勢を取ることが許容される。一方で、運転者による移動体の操舵が要求される場合、運転者は、操舵に適した姿勢を取ることが望まれる。そのため、運転者の姿勢を検知可能な技術が望まれている。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の第1の形態によれば、センサシステムが提供される。このセンサシステムは、移動体の運転者の少なくとも腕部を支持可能なアームレスト部に設けられ、前記運転者によって前記アームレスト部に加えられる荷重と、前記アームレスト部への前記運転者の接触面積と、の少なくとも一方に関するセンサ値を検出可能に構成されたセンサ部と、制御部と、を備える。前記制御部は、前記運転者による前記移動体の操舵が要求される場合に、前記センサ値を用いて、前記アームレスト部への前記運転者の寄りかかりを検知し、前記寄りかかりが検知された場合に、前記運転者に対する警告を実行する。
この形態によれば、操舵が要求される場合に、アームレスト部に設けられたセンサ部によって検出されるセンサ値を用いて、アームレスト部に寄りかかる不適切な姿勢を運転者が取っていることを検知できる。また、寄りかかりが検知された場合に、運転者に対する警告が実行されるので、運転者に適切な姿勢を取るよう促すことができる。
(2)上記形態において、前記センサ部は、前記センサ値として、前記運転者によって前記アームレスト部の上面に加えられる荷重と、前記上面への前記運転者の接触面積と、の少なくとも一方に関する値を検出可能に構成されていてもよい。この形態によれば、アームレスト部への寄りかかりをより効果的に検知できる。
(3)上記形態において、前記センサ部は、前記アームレスト部のうち前記上面を含む上面部分に設けられていてもよい。この形態によれば、上面に加えられる荷重と上面への接触面積との少なくとも一方に関するセンサ値をより適切に検出できる。
(4)上記形態において、前記センサ部は、前記センサ値として、前記アームレスト部の側面であって、前記運転者によって前記運転者が着座する運転座席側の側面に加えられる荷重と、前記側面への前記運転者の接触面積と、の少なくとも一方に関する値を検出可能に構成されていてもよい。この形態によれば、アームレスト部への寄りかかりをより効果的に検出できる。
(5)上記形態において、前記センサ部は、前記アームレスト部のうち前記側面を含む側面部分に設けられていてもよい。この形態によれば、側面に加えられる荷重と側面への接触面積との少なくとも一方に関するセンサ値をより適切に検出できる。
(6)上記形態において、前記制御部は、前記警告において、前記アームレスト部と、前記運転者が着座する運転座席と、の少なくとも一方を振動させてもよい。この形態によれば、アームレスト部に寄りかかっている運転者に対して、より効果的に警告することができる。
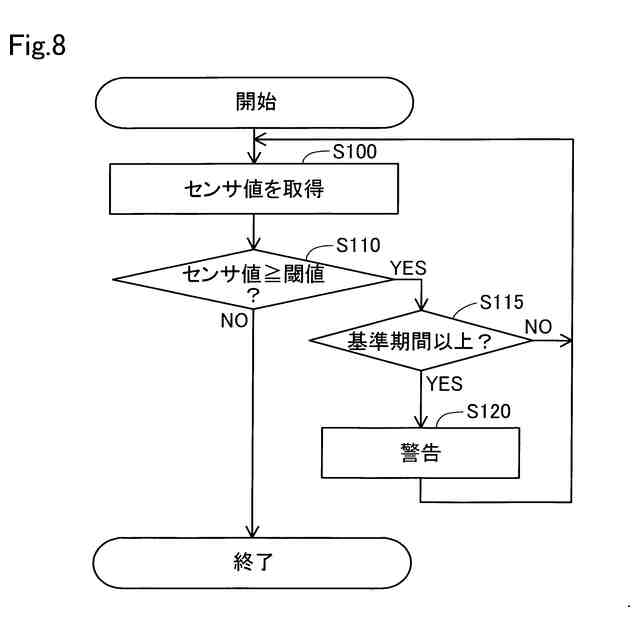
(7)上記形態において、前記制御部は、予め定められた基準期間以上、前記センサ値が予め定められた閾値以上である場合に、前記寄りかかりを検知してもよい。この形態によれば、センサ値が閾値以上である時間の長さを加味して、寄りかかりを検知できる。
(8)上記形態において、前記センサ部は、前記センサ値として、前記センサ部と前記運転者との間の静電容量を検出する静電容量センサとして構成されていてもよい。この形態によれば、寄りかかりをより適切に検出可能なセンサ部を簡易に構成できる。
本開示は、上述したセンサシステムとしての形態以外にも、例えば、移動体や、アームレストや、センサシステムの制御方法や、移動体の制御方法や、運転支援方法や、プログラムや、プログラムが記録された一時的でない記録媒体や、プログラム製品などの形態で実現することができる。なお、プログラム製品は、例えば、プログラムが記録された記録媒体として提供されてもよいし、ネットワークを介して配信可能なプログラム製品として提供されてもよい。
【図面の簡単な説明】
【0007】
第1実施形態における移動体としての車両の概略構成を示す平面図。
車両内の運転座席および助手席の近傍を示す正面図。
センサシステムの概略構成を示すブロック図。
第1実施形態におけるアームレスト部の概略構成を示す斜視図。
第1実施形態におけるアームレスト部の概略構成を示す分解斜視図。
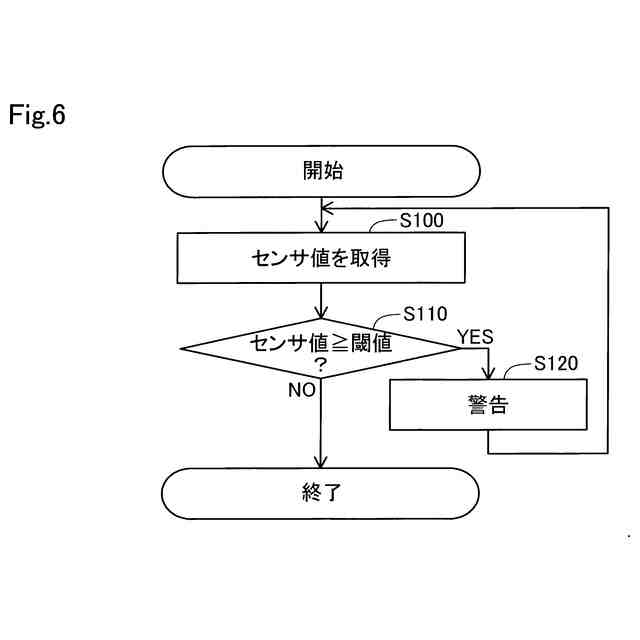
第1実施形態における判定処理の処理手順の一例を示すフローチャート。
第2実施形態におけるアームレスト部を示す説明図。
第3実施形態における判定処理の処理手順の一例を示すフローチャート。
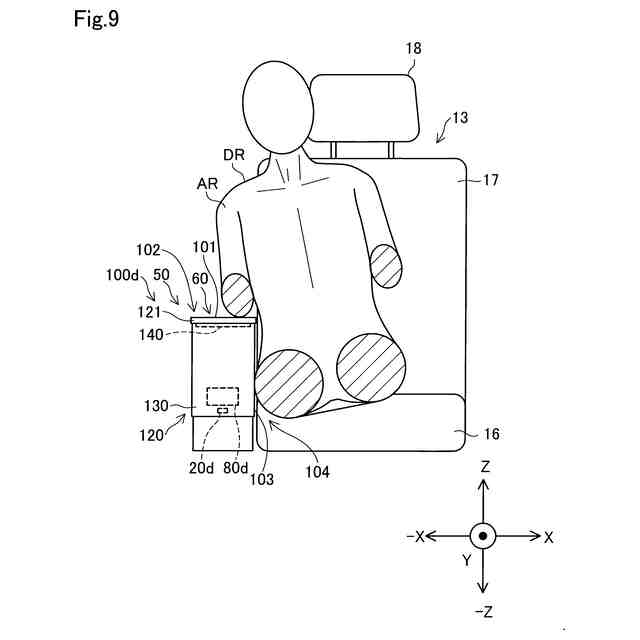
第4実施形態におけるアームレスト部を示す説明図。
【発明を実施するための形態】
【0008】
A.第1実施形態:
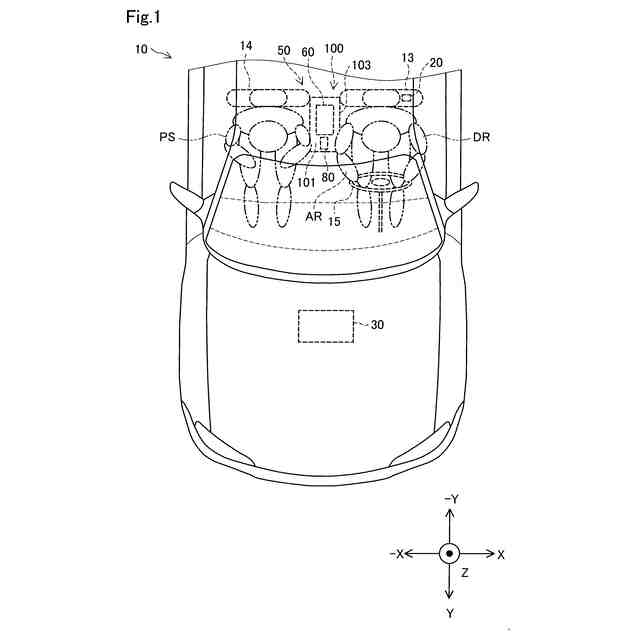
図1は、第1実施形態における移動体としての車両10の概略構成を示す平面図である。図2は、車両10内の運転座席13および助手席14の近傍を示す正面図である。図1および図2には、互いに直交するX,Y,Z方向に沿った矢印が表されている。X,Y,Z方向は、互いに直交する3つの空間軸であるX軸、Y軸、Z軸に沿った方向であり、それぞれ、X軸、Y軸、Z軸に沿う一方側の方向と、その反対方向とを、両方含む。具体的には、前記X軸,Y軸,Z軸に沿った正の方向が、それぞれ+X方向,+Y方向,+Z方向であり、前記X軸,Y軸,Z軸に沿った負の方向が、それぞれ-X方向,-Y方向,-Z方向である。Y方向は、車両10の前後方向に相当する。+Y方向は、前方であり、-Y方向は、後方である。X方向は、車両10の左右方向に相当する。本開示において、左右方向は、車両10を後方側から前方側に向かって見たときの左右方向を意味する。+X方向は、左方向であり、-X方向は、右方向である。また、Z方向は、車両10の上下方向に相当する。+Z方向は、鉛直上方向であり、-Z方向は、鉛直下方向である。他の図においても、X,Y,Z方向に沿った矢印が、適宜、表されている。図1および図2におけるX,Y,Z方向と、他の図におけるX,Y,Z方向とは、同じ方向を表している。
【0009】
図1および図2に示すように、車両10は、センサシステム50を搭載する。また、車両10は、アームレスト部100と、運転制御装置30とを備える。アームレスト部100のことを、アームレスト装置ともいう。なお、図1および図2には、運転座席13に着座した車両10の運転者DRと、助手席14に着座した乗員PSとが模式的に示されている。
【0010】
車両10は、例えば、乗用車や、バスや、トラックなどである。車両10は、車両10の推進力を発生させる駆動用アクチュエータと、車両10の制動力を発生させる制動用アクチュエータと、車両10の進行方向を変更する操舵用アクチュエータとを備えている。図1に示した運転制御装置30は、例えば、1以上のプロセッサとメモリと入出力インタフェイスとを備えるコンピュータとして構成され、これらのアクチュエータを制御する。運転制御装置30は、動作モードとして、手動運転モードと自動運転モードとを有している。手動運転モードでは、運転制御装置30は、アクセルペダルやブレーキペダルやステアリング装置15に対する運転者DRの操作に応じて駆動用アクチュエータと制動用アクチュエータと操舵用アクチュエータとを制御することにより、車両10を走行させる。自動運転モードでは、運転制御装置30は、駆動用アクチュエータと制動用アクチュエータと操舵用アクチュエータとの少なくとも一つを自動で制御することにより、車両10を走行させることができる。こうした各アクチュエータの自動制御により、運転制御装置30は、米国自動車技術者協会(SAE:Society of Automotive Engineers)により定義されたレベル1からレベル5までの自動運転を実現することができる。なお、SAEにより定義されたレベル1からレベル2までの自動運転のことを運転支援ともいう。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る






 特許ウォッチ
特許ウォッチ