TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025170023
公報種別
公開特許公報(A)
公開日
2025-11-14
出願番号
2025141699,2023551817
出願日
2025-08-27,2022-09-28
発明の名称
情報処理装置、ロボットコントローラ、情報処理システム、及び情報処理方法
出願人
京セラ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
13/00 20060101AFI20251107BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットを使用する際の効率を向上できる情報処理装置、ロボットコントローラ、情報処理システム、及び情報処理方法を提供する。
【解決手段】情報処理装置は、記憶部に記録された、ロボットの処理パターンを含む少なくとも1つの制御プログラムから、第1ロボットに実行させる第1制御プログラムを推定する制御部を備える。制御部は、第1ロボットの作業環境の少なくとも一部を示す第1環境情報を取得し、第1環境情報に基づいて第1ロボットに実行させる少なくとも1つの第1処理パターンの候補を推定することによって、第1制御プログラムを推定する。
【選択図】図1
特許請求の範囲
【請求項1】
記憶部に記録された、ロボットの処理パターンを含む少なくとも1つの制御プログラムから、第1ロボットに実行させる第1制御プログラムを推定する制御部を備え、
前記制御部は、
前記第1ロボットの作業環境の少なくとも一部を示す第1環境情報を取得し、
前記第1環境情報に基づいて前記第1ロボットに実行させる少なくとも1つの第1処理パターンの候補を推定することによって、前記第1制御プログラムを推定する、情報処理装置。
発明の詳細な説明
【関連出願へのクロスリファレンス】
【0001】
本出願は、日本国特許出願2021-158478号(2021年9月28日出願)の優先権を主張するものであり、当該出願の開示全体を、ここに参照のために取り込む。
続きを表示(約 1,400 文字)
【技術分野】
【0002】
本開示は、情報処理装置、ロボットコントローラ、情報処理システム、及び情報処理方法に関する。
【背景技術】
【0003】
従来、ユーザからの指示に不足があってもロボットに作業群を実行させる装置が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2021-30407号公報
【発明の概要】
【0005】
本開示の一実施形態に係る情報処理装置は、記憶部に記録された、ロボットの処理パターンを含む少なくとも1つの制御プログラムから、第1ロボットに実行させる第1制御プログラムを推定する制御部を備える。前記制御部は、前記第1ロボットの作業環境の少なくとも一部を示す第1環境情報を取得し、前記第1環境情報に基づいて前記第1ロボットに実行させる少なくとも1つの第1処理パターンの候補を推定することによって、前記第1制御プログラムを推定する。
【0006】
本開示の一実施形態に係るロボットコントローラは、前記情報処理装置から出力された、前記第1制御プログラムに基づいて前記第1ロボットを制御する。
【0007】
本開示の一実施形態に係る情報処理システムは、前記情報処理装置と、前記情報処理装置に接続されるとともに、前記処理パターンを実行させる制御プログラムを記録したデータベースとを備える。
【0008】
本開示の一実施形態に係る情報処理方法は、情報処理装置に記録された、ロボットの処理パターンを含む少なくとも1つの制御プログラムから、第1ロボットに実行させる第1制御プログラムを推定する情報処理装置によって実行される。前記情報処理方法は、前記情報処理装置が、前記第1ロボットの作業環境の少なくとも一部を示す第1環境情報を取得することを含む。前記情報処理方法は、前記情報処理装置が、前記第1環境情報に基づいて前記第1ロボットに実行させる少なくとも1つの第1処理パターンの候補を推定することによって、前記第1制御プログラムを推定することを含む。
【図面の簡単な説明】
【0009】
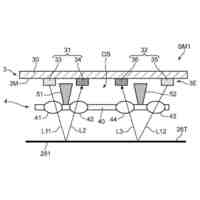
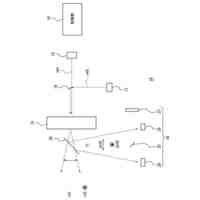
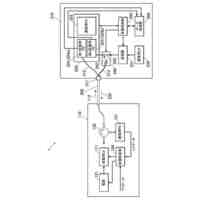
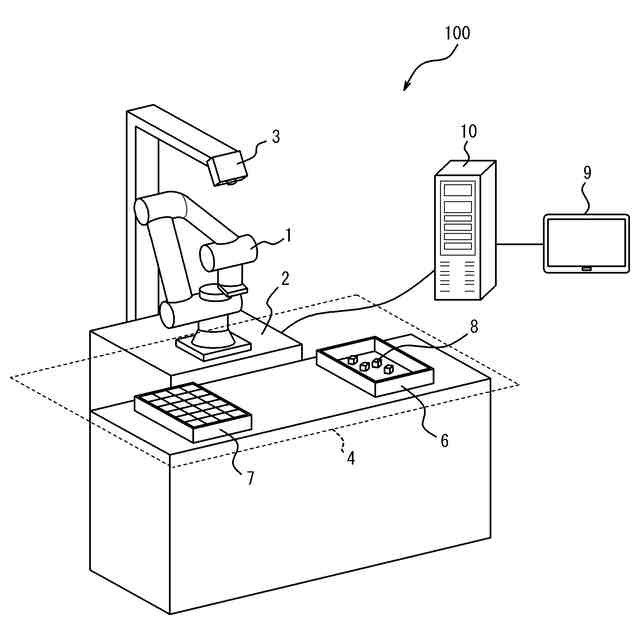
一実施形態に係るロボット制御システムの構成例を示す模式図である。
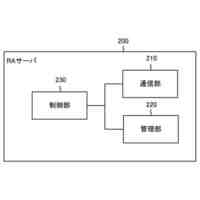
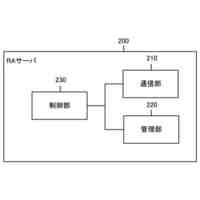
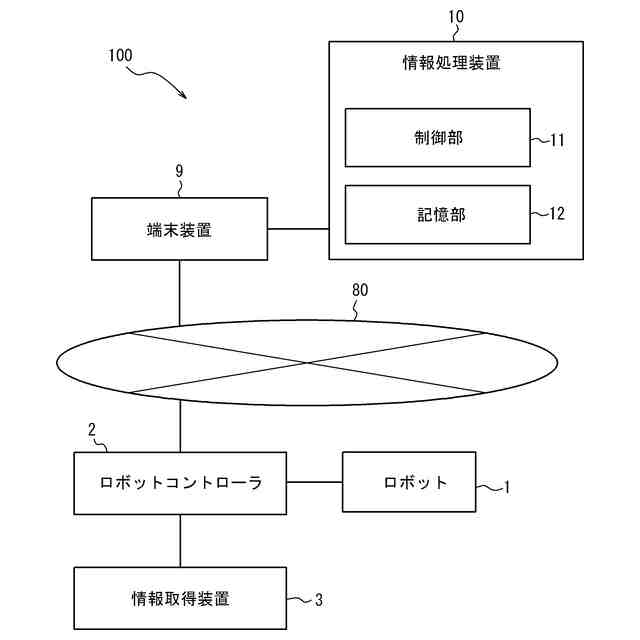
一実施形態に係るロボット制御システムの構成例を示すブロック図である。
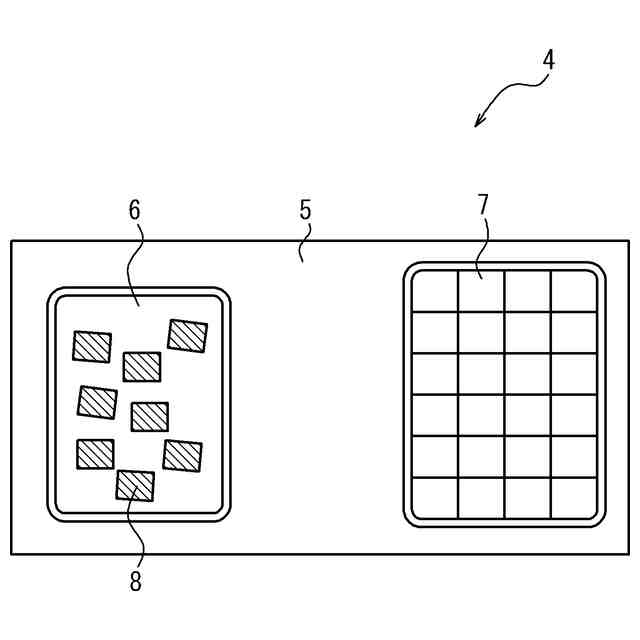
作業環境画像の一例を示す図である。
作業環境に位置する物体の属性情報の一例を示す表である。
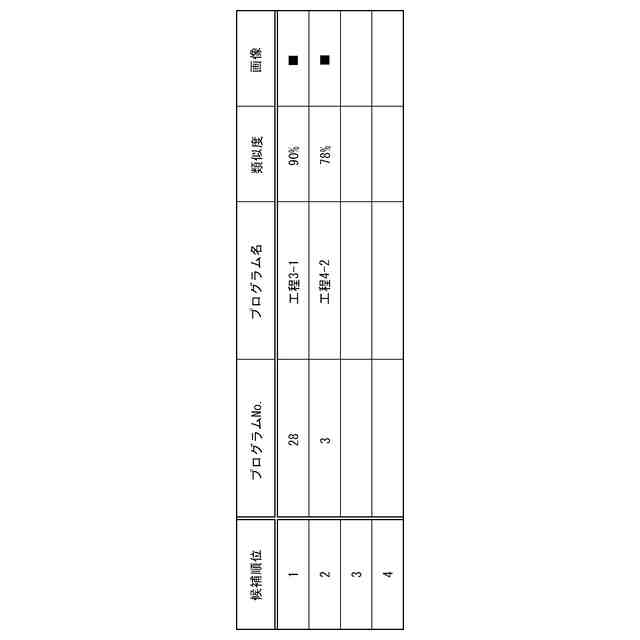
作業環境画像に基づいて抽出したプログラムの候補の一例を示す表である。
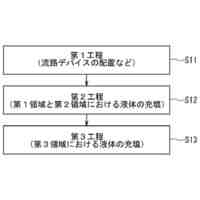
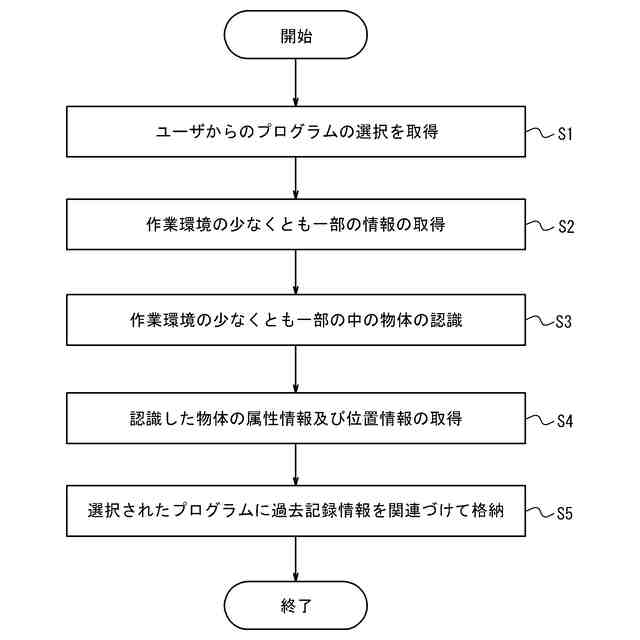
制御プログラムと過去記録情報とを関連づける手順例を示すフローチャートである。
一実施形態に係る情報処理方法の手順例を示すフローチャートである。
【発明を実施するための形態】
【0010】
(ロボット制御システム100の概要)
図1及び図2に示されるように、一実施形態に係るロボット制御システム100は、ロボット1と、ロボットコントローラ2と、情報取得装置3と、端末装置9と、情報処理装置10とを備える。ロボット制御システム100は、作業環境4に位置する作業台5の上に配置されている物体に対してロボット1に作業を実行させる。具体的に、例えばロボット1は、第1トレイ6に収容されているワーク8を、第2トレイ7に移動させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
京セラ株式会社
光学系
18日前
京セラ株式会社
二次電池
2か月前
京セラ株式会社
蓄電装置
1か月前
京セラ株式会社
配線基板
24日前
京セラ株式会社
配線基板
24日前
京セラ株式会社
弾性波装置
1か月前
京セラ株式会社
粒子分離装置
1か月前
京セラ株式会社
センサシステム
1か月前
京セラ株式会社
静圧気体軸受装置
1か月前
京セラ株式会社
太陽電池モジュール
2か月前
京セラ株式会社
光センサモジュール
5日前
京セラ株式会社
光センサモジュール
5日前
京セラ株式会社
予測装置及び予測方法
13日前
京セラ株式会社
配線基板及び電子装置
1か月前
京セラ株式会社
コネクタ及び取付方法
1か月前
京セラ株式会社
印刷装置及び印刷方法
10日前
京セラ株式会社
走査装置及び制御装置
1か月前
京セラ株式会社
走査装置及び制御装置
1か月前
京セラ株式会社
配線基板及び電子装置
1か月前
京セラ株式会社
積層セラミック電子部品
11日前
京セラ株式会社
太陽電池付きカーポート
1か月前
京セラ株式会社
発光装置および照明装置
1か月前
京セラ株式会社
太陽電池付きカーポート
1か月前
京セラ株式会社
流路デバイスの準備方法
1か月前
京セラ株式会社
取付部材及びヘッド取付方法
1か月前
京セラ株式会社
半導体装置及びその製造方法
2か月前
京セラ株式会社
電磁波検出装置及び制御装置
24日前
京セラ株式会社
受電装置及び光給電システム
1か月前
京セラ株式会社
骨モデルおよび表示システム
2か月前
京セラ株式会社
電源制御装置及び電源制御方法
2か月前
京セラ株式会社
液体吐出ヘッドおよび記録装置
2か月前
京セラ株式会社
光集積回路及び光トランシーバ
24日前
京セラ株式会社
電源制御装置及び電源制御方法
2か月前
京セラ株式会社
端子、端子部材および電気機器
5日前
京セラ株式会社
端子、端子部材および電気機器
3日前
京セラ株式会社
電源制御装置及び電源制御方法
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ