TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025169285
公報種別
公開特許公報(A)
公開日
2025-11-12
出願番号
2025129048,2021547683
出願日
2025-08-01,2020-02-12
発明の名称
磁気によりガイドされた材料取扱いロボット
出願人
パーシモン テクノロジーズ コーポレイション
,
PERSIMMON TECHNOLOGIES, CORP.
,
住友重機械工業株式会社
代理人
個人
主分類
H01L
21/677 20060101AFI20251105BHJP(基本的電気素子)
要約
【課題】真空中で放出ガス、放出粒子等で環境を汚染しないロボットを提供する。
【解決手段】ロボットは、その上で基板を支持する第1のデバイスと、第1のデバイスが接続された第1の搬送機構と、を備え、第1の搬送機構は、レール又は磁気浮上ガイドと、レール又は磁気浮上ガイドの上方に、第1のデバイスとレール又は磁気浮上ガイドとの間に隙間を空けて、第1のデバイスを垂直に置く磁気システムと、レール又は磁気浮上ガイドに沿って第1のデバイスを動かすリニアアクチュエータと、を備える。磁気システムは、第1のデバイスの第1の側の第1の角部にある第1の電磁アクチュエータと、第1のデバイスの第1の側の第2の角部にある第2の電磁アクチュエータと、第1のデバイスの対向する第2の側にあり、第1のデバイスの3つの側の角部に近接配置されない第3の電磁アクチュエータと、を備える。
【選択図】なし
特許請求の範囲
【請求項1】
その上で基板を支持するように構成された第1のデバイスと、
前記第1のデバイスが接続された第1の搬送機構と、
外部のコントローラと通信するよう構成された無線通信デバイスと、
を備える装置であって、
前記第1の搬送機構は、水平経路に沿った移動のために前記第1のデバイスを支持するように構成され、
前記第1の搬送機構は、
・ 第1のガイド及び第2のガイドを含む少なくとも2つのガイドと、
・ 前記少なくとも2つのガイドの上方に、前記第1のデバイスと前記少なくとも2つのガイドとの間に隙間を空けて、前記第1のデバイスを垂直に置くように構成された磁気システムと、
・ 前記少なくとも2つのガイドに沿った前記経路に前記第1のデバイスを動かすように構成されたリニアアクチュエータと、
を備え、
前記磁気システムは、
・ 前記第1のデバイスの第1の側の第1の角部にある第1の電磁アクチュエータと、
・ 前記第1のデバイスの前記第1の側の第2の角部にある第2の電磁アクチュエータと、
・ 前記第1のデバイスの対向する第2の側にあり、前記第1のデバイスの3つの側の角部に近接配置されない第3の電磁アクチュエータと、
を備え、
前記無線通信デバイスは、前記磁気システムを制御するために、前記コントローラ内のマスターコントローラと通信するように構成された光通信リンクを備える、
装置。
続きを表示(約 1,500 文字)
【請求項2】
前記第1、第2、及び第3の電磁アクチュエータは、いずれも、前記少なくとも2つのガイドの垂直上方に前記第1のデバイスを離間させるアクチュエータである、請求項1に記載の装置。
【請求項3】
前記第1及び第2の電磁アクチュエータはそれぞれ、前記第1のデバイスと前記第1のガイドとの間に相反する水平力を生成するように構成される、請求項1又は2に記載の装置。
【請求項4】
前記第3の電磁アクチュエータは、前記第1のデバイスと前記第2のガイドとの間に水平力を生成するように構成されていない、請求項3に記載の装置。
【請求項5】
前記第1及び第2の電磁アクチュエータはそれぞれ、前記第1のデバイスと前記第1のガイドとの間に第1の方向に水平力を生成するように構成され、
前記装置は、前記第1のデバイスの3つの側のそれぞれ第3及び第4の角部に近接する第4の電磁アクチュエータ及び第5の電磁アクチュエータをさらに備え、
前記第4及び第5の電磁アクチュエータはそれぞれ、前記第1のデバイスと前記第2のガイドとの間に反対の第2の方向に水平力を生成するように構成される、請求項1に記載の装置。
【請求項6】
前記第1のデバイスと前記第1のガイドとの間に第1の方向に水平力を生成するように構成される、前記第1のデバイスの前記第1の側に近接して配置された第4の電磁アクチュエータと、前記第1のデバイスの3つの側のそれぞれ第3及び第4の角部に近接する第4の電磁アクチュエータ及び第5の電磁アクチュエータと、をさらに備え、
前記第4及び第5の電磁アクチュエータはそれぞれ、前記第1のデバイスと前記第2のガイドとの間に反対の第2の方向に水平力を生成するように構成される、請求項1に記載の装置。
【請求項7】
前記少なくとも2つのガイドは、前記第1のガイドと前記第2のガイドとの間に第3のガイドを備え、
前記装置は、前記第3のガイドに第4の電磁アクチュエータ及び第5の電磁アクチュエータをさらに含み、
前記第4及び第5の電磁アクチュエータはそれぞれ、前記第1のデバイスと前記第3のガイドとの間に相反する水平力を生成するように構成される、請求項1に記載の装置。
【請求項8】
前記第1のデバイスは、その中にロボットモータを有するロボット筐体と、前記ロボットモータに接続されたロボットアームと、を備え、
前記ロボットアームは前記ロボット筐体の外側に配置され、
前記ロボットアームはその上で前記基板を支持するように構成されたエンドエフェクタを備え、
前記第1の側は前記ロボット筐体の第1の側面であり、前記第2の側は前記ロボット筐体の第2の対向する側面である、請求項1から7のいずれかに記載の装置。
【請求項9】
前記第1の電磁アクチュエータに第1のセンサを、前記第2の電磁アクチュエータに第2のセンサを、前記第3の電磁アクチュエータに第3のセンサを、さらに備え、
前記第1~第3のセンサは、前記第1及び第2のガイドに対する前記第1のデバイスの位置を測定するように構成される、請求項1から8のいずれかに記載の装置。
【請求項10】
前記無線通信デバイスは、前記装置のモータアンプからの全運動軸の位置を周期的に前記コントローラに送信すると共に、前記装置の入出力モジュールからのデジタル及びアナログ入力のステータスと、前記入出力モジュールからのデジタル入力変更のタイミングとを前記コントローラに送信するように構成される、請求項1から9のいずれかに記載の装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
例示的かつ非制限的な実施形態は、概して、基板搬送ロボットアセンブリに関する。
続きを表示(約 2,100 文字)
【従来技術の簡単な説明】
【0002】
基板を搬送するためのロボットが知られている。米国特許出願公開第2016/0229296号明細書、第2013/0071218号明細書、第2015/0214086号明細書、及び第2017/0028546号明細書(これらは、その全体が参照により本明細書に組み込まれる)に記載されているような基板搬送ロボットの搬送のためのリニア駆動システムも知られている。
【摘要】
【0003】
以下の摘要は、単に例示的であるように意図される。この摘要は、特許請求の範囲を制限することを意図したものではない。
【0004】
一態様によれば、装置が提供される。当該装置は、その上で基板を支持するように構成された第1のデバイスと、前記第1のデバイスが接続された第1の搬送機構と、を備える。前記第1の搬送機構は、水平経路に沿った移動のために前記第1のデバイスを支持するように構成される。前記第1の搬送機構は、少なくとも2つのレールと、前記少なくとも2つのレールの上方に、前記第1のデバイスと前記少なくとも2つのレールとの間に隙間を空けて、前記第1のデバイスを垂直に置くように構成された磁気システムと、前記少なくとも2つのレールに沿った経路に前記第1のデバイスを動かすように構成されたリニアアクチュエータと、を備える。前記磁気システムは、前記第1のデバイスの第1の側の第1の角部にある第1の電磁アクチュエータと、前記第1のデバイスの前記第1の側の第2の角部にある第2の電磁アクチュエータと、前記第1のデバイスの対向する第2の側にあり、前記第1のデバイスの3つの側の角部に近接配置されない第3の電磁アクチュエータと、を備える。
【0005】
別の態様によれば、方法が提供される。当該方法は、第1のデバイスの第1の側の第1の角部に近接して第1の電磁アクチュエータを接続することと、前記第1のデバイスの前記第1の側の第2の角部に近接して第2の電磁アクチュエータを接続することと、前記第1のデバイスの対向する第2の側に近接して第3の電磁アクチュエータを接続することと、前記第1のデバイスを少なくとも2つのレールの上方に配置することと、を含む。前記第1の角部は前記第1のデバイスの3つの側にあり、前記第1のデバイスはその上で基板を支持するように構成され、前記第1の電磁アクチュエータは、前記第1のデバイスが接続された第1の搬送機構の磁気システムの一部であり、前記第1の搬送機構は、水平経路に沿った移動のために前記第1のデバイスを支持するように構成される。前記第2の電磁アクチュエータは、前記磁気システムの一部であり、前記第2の角部は前記第1のデバイスの3つの側にある。前記第3の電磁アクチュエータは、前記磁気システムの一部であり、前記第3の電磁アクチュエータは、前記第1のデバイスの3つの側の角部に近接配置されない。前記第1及び第2の電磁アクチュエータは前記レールのうちの第1のレールに配置され、前記第3の電磁アクチュエータは前記レールのうちの異なる第2のレールに配置される。
【0006】
別の態様によれば、方法が提供される。当該方法は、第1のレールの上方に第1のデバイスの第1の角部を垂直に置くように磁気システムの第1の電磁アクチュエータを制御することと、前記第1のレールの上方に前記第1のデバイスの異なる第2の角部を垂直に置くように前記磁気システムの第2の電磁アクチュエータを制御することと、第2のレールの上方に前記第1のデバイスを垂直に置くように前記磁気システムの第3の電磁アクチュエータを制御することと、を含む。前記第1の電磁アクチュエータは、前記第1のレール及び前記第2のレールの上方に、前記第1のデバイスと前記レールとの間に隙間を空けて、前記第1のデバイスを磁気により垂直に置くように構成された第1の搬送機構の一部であり、前記第1の搬送機構は、水平経路に沿った移動のために前記第1のデバイスを支持するように構成され、前記第1の角部は前記第1のデバイスの3つの側にあり、前記第1のデバイスはその上で基板を支持するように構成される。前記第2の角部は前記第1のデバイスの3つの側にあり、前記第1及び第2の角部は前記第1のデバイスの第1の側にある。前記第3の電磁アクチュエータは、前記第1のデバイスの対向する第2の側に配置され、前記第3の電磁アクチュエータは、前記第1のデバイスの3つの側の角部に近接配置されない。
【図面の簡単な説明】
【0007】
前述の態様及び他の特徴は、以下の説明で添付図面と共に説明される。
【0008】
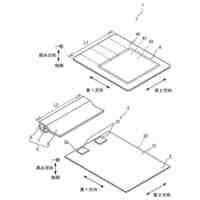
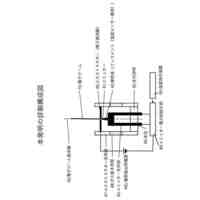
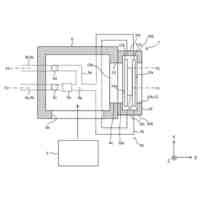
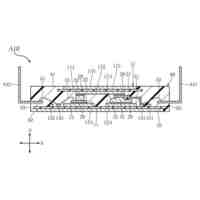
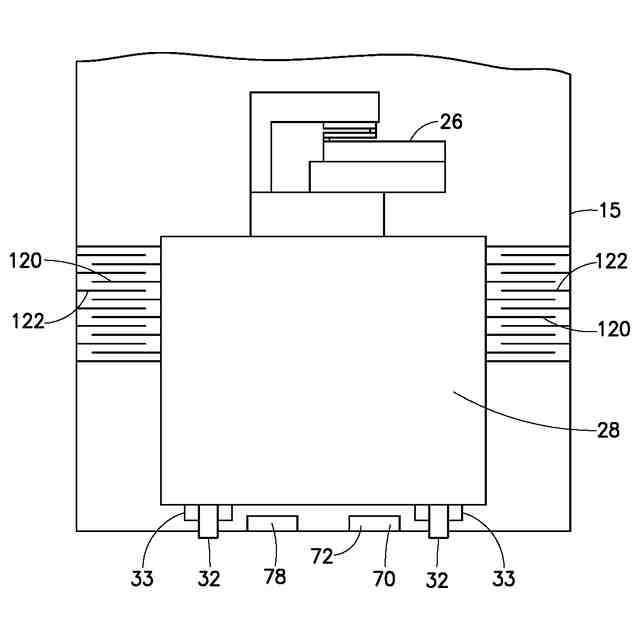
本明細書に記載されるような特徴を含む基板処理装置の概略上面図である。
【0009】
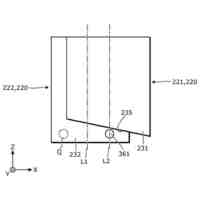
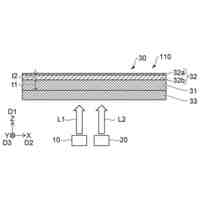
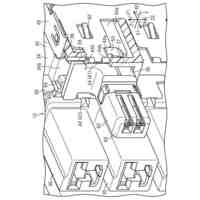
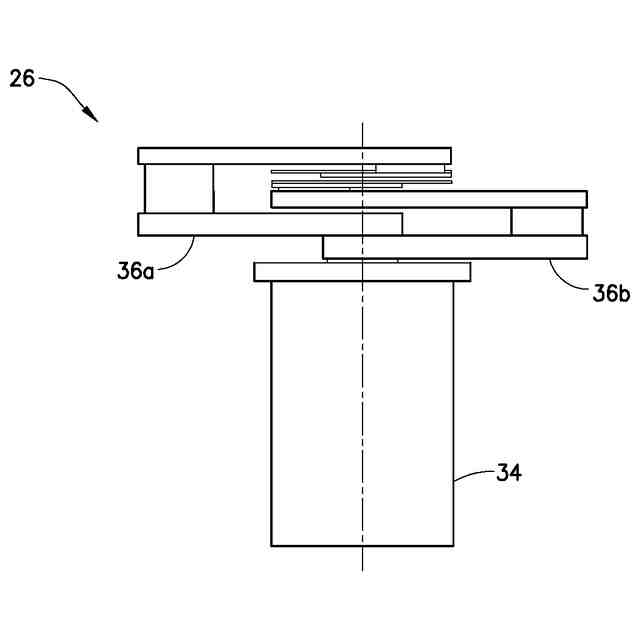
図1に示す基板処理装置の基板搬送装置の斜視図である。
【0010】
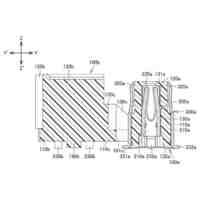
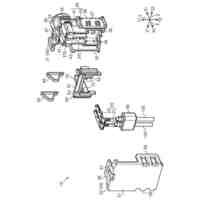
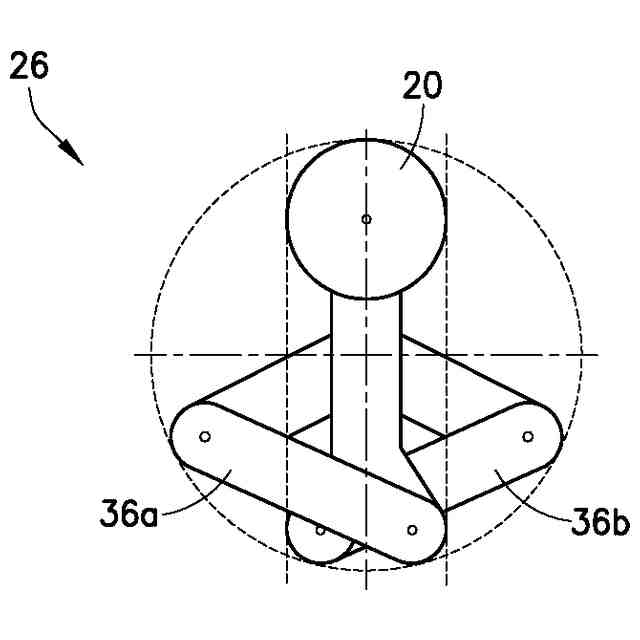
図2に示す基板搬送装置の斜視図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
東ソー株式会社
絶縁電線
1か月前
APB株式会社
蓄電セル
1か月前
日機装株式会社
加圧装置
2日前
日新イオン機器株式会社
イオン源
2日前
株式会社東芝
端子台
1か月前
マクセル株式会社
電源装置
1か月前
ローム株式会社
半導体装置
1か月前
三菱電機株式会社
回路遮断器
25日前
富士電機株式会社
電磁接触器
17日前
株式会社GSユアサ
蓄電装置
17日前
株式会社ホロン
冷陰極電子源
1か月前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
トヨタ自動車株式会社
冷却構造
1か月前
北道電設株式会社
配電具カバー
1か月前
大電株式会社
電線又はケーブル
9日前
日本特殊陶業株式会社
保持装置
1か月前
日新イオン機器株式会社
基板処理装置
1か月前
株式会社東芝
電子源
2日前
個人
電源ボックス及び電子機器
2日前
トヨタ自動車株式会社
蓄電装置
9日前
日本特殊陶業株式会社
保持装置
1か月前
ホシデン株式会社
複合コネクタ
11日前
株式会社トクミ
ケーブル
3日前
トヨタ自動車株式会社
バッテリ
1か月前
トヨタ自動車株式会社
蓄電装置
1か月前
住友電装株式会社
コネクタ
17日前
トヨタ自動車株式会社
電池パック
1か月前
甲神電機株式会社
変流器及び零相変流器
1か月前
矢崎総業株式会社
コネクタ
17日前
ローム株式会社
半導体装置
1か月前
日本無線株式会社
レーダアンテナ
1か月前
ローム株式会社
半導体モジュール
18日前
住友電装株式会社
コネクタ
1か月前
株式会社レゾナック
冷却器
25日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ