TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025168953
公報種別
公開特許公報(A)
公開日
2025-11-12
出願番号
2024073851
出願日
2024-04-30
発明の名称
操舵制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B62D
6/00 20060101AFI20251105BHJP(鉄道以外の路面車両)
要約
【課題】取付姿勢のズレに起因した車両横位置の誤差への影響の大きさに応じて目標横位置を補正する学習値を算出することができる操舵制御装置を提供する。
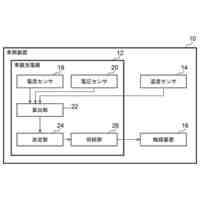
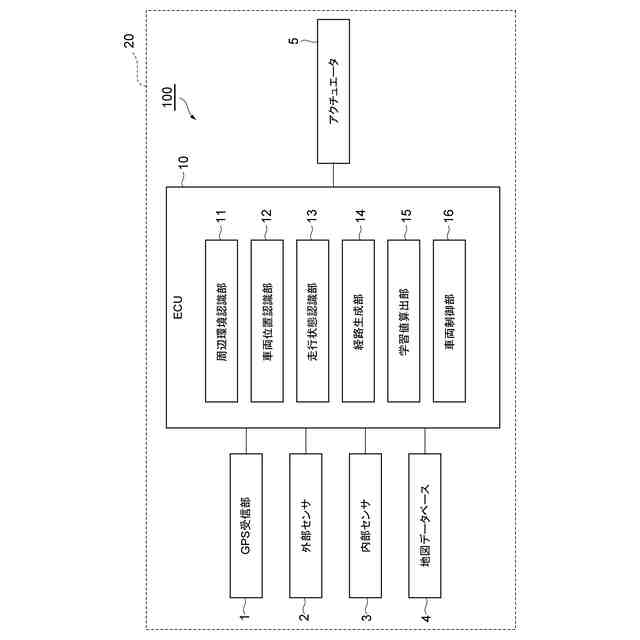
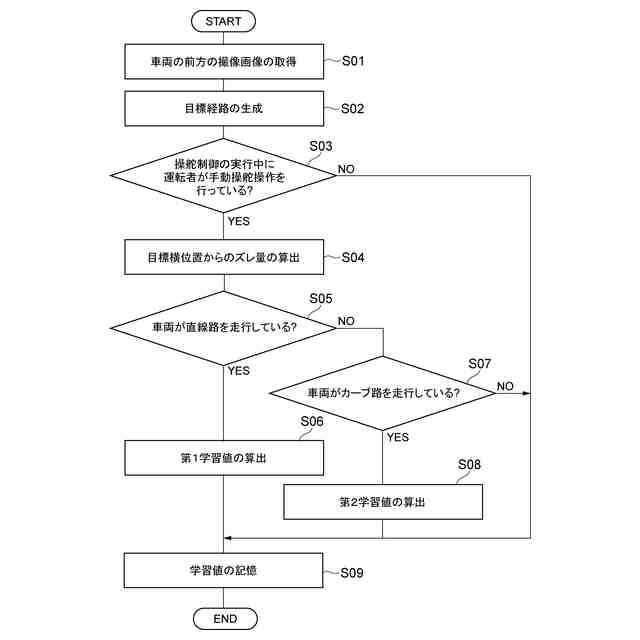
【解決手段】操舵制御装置100は、車両20の操舵支援又は自動操舵を含む操舵制御を実行する。操舵制御装置100は、車両20の前方の撮像画像に基づいて、目標横位置を含む目標経路を生成する経路生成部14と、操舵制御の実行中に車両20の運転者が手動操舵操作を行っている際、手動操舵操作に従った車両20の手動経路が目標経路に対して有する目標横位置からのズレ量に基づいて、目標横位置を補正する学習値を算出する学習値算出部15と、目標経路と学習値とに基づいて操舵制御を実行する車両制御部16と、を備える。学習値算出部15は、車両20が直線路を走行しているときの学習値である第1学習値と、車両20がカーブ路を走行しているときの学習値である第2学習値と、を算出する。
【選択図】図1
特許請求の範囲
【請求項1】
車両の操舵支援又は自動操舵を含む操舵制御を実行する操舵制御装置であって、
前記車両の前方の撮像画像に基づいて、前記車両の走行車線における目標横位置を含む目標経路を生成する経路生成部と、
前記操舵制御の実行中に前記車両の運転者が手動操舵操作を行っている際、前記手動操舵操作に従った前記車両の手動経路が前記目標経路に対して有する前記目標横位置からのズレ量に基づいて、前記目標横位置を補正する学習値を算出する学習値算出部と、
前記目標経路と前記学習値とに基づいて前記操舵制御を実行する操舵制御部と、を備え、
前記学習値算出部は、前記車両が直線路を走行しているときの前記学習値である第1学習値と、前記車両がカーブ路を走行しているときの前記学習値である第2学習値と、を算出する、操舵制御装置。
続きを表示(約 210 文字)
【請求項2】
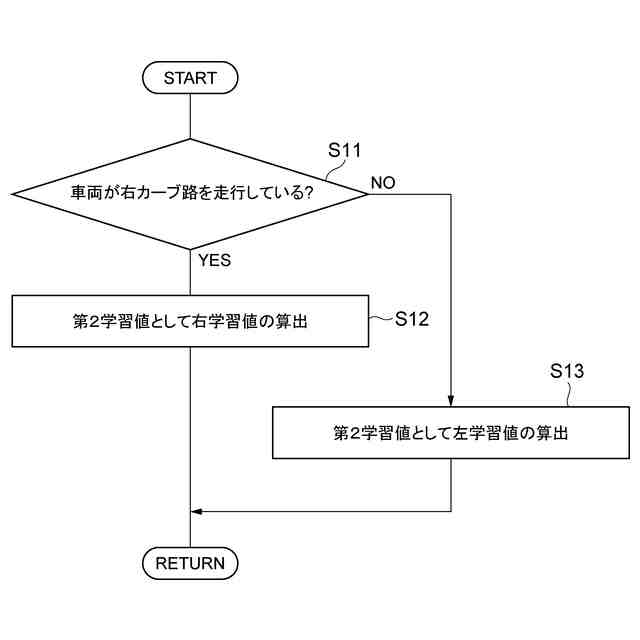
前記学習値算出部は、前記車両が右カーブ路を走行しているときの前記第2学習値である右学習値と、前記車両が左カーブ路を走行しているときの前記第2学習値である左学習値と、を算出する、請求項1に記載の操舵制御装置。
【請求項3】
前記学習値算出部は、前記第1学習値の学習速度よりも前記第2学習値の学習速度が速くなるように、前記学習値を算出する、請求項1又は2に記載の操舵制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、操舵制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1に記載の自車位置推定装置では、操舵オーバーライドと判定された場合に自車横位置制御が中断され、その後、操舵オーバーライド終了と判定された場合に自車横位置制御が再開される。GPS情報に基づく自車位置と地図情報に基づく自車位置との差分がGPS情報の固有位置誤差とみなされて、この固有位置誤差が操舵オーバーライド終了時の自車位置に反映される。
【先行技術文献】
【特許文献】
【0003】
特開2017-013586号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来、例えば出荷段階の組付け誤差がある場合及びユーザが意図せずカメラに触れて向きがずれる場合等、操舵制御に用いるカメラ等の取付姿勢が理想的な状態からずれてしまうことがある。そのような取付姿勢のズレが車両横位置の誤差に対して与える影響は、直線とカーブとで必ずしも一律ではない。そのため、誤差の補正には改良の余地があった。
【課題を解決するための手段】
【0005】
本開示の一態様は、車両の操舵支援又は自動操舵を含む操舵制御を実行する操舵制御装置であって、車両の前方の撮像画像に基づいて、車両の走行車線における目標横位置を含む目標経路を生成する経路生成部と、操舵制御の実行中に車両の運転者が手動操舵操作を行っている際、手動操舵操作に従った車両の手動経路が目標経路に対して有する目標横位置からのズレ量に基づいて、目標横位置を補正する学習値を算出する学習値算出部と、目標経路と学習値とに基づいて操舵制御を実行する操舵制御部と、を備え、学習値算出部は、車両が直線路を走行しているときの学習値である第1学習値と、車両がカーブ路を走行しているときの学習値である第2学習値と、を算出する。
【0006】
本開示の一態様に係る操舵制御装置では、目標横位置を補正する学習値として、直線路用の第1学習値とカーブ路用の第2学習値とが算出される。ここで、車両が走行する道路上における車両横位置の誤差は、撮像画像を取得するカメラの取付姿勢のズレに起因して生じ得る。取付姿勢のズレに起因した車両横位置の誤差は、直線の道路とカーブの道路とで比較して、例えば直線よりもカーブの方で大きくなる等、必ずしも一律ではない。上記構成によれば、直線路用の第1学習値とカーブ路用の第2学習値とは、互いに異なる値として算出され得る。したがって、取付姿勢のズレに起因した車両横位置の誤差への影響の大きさに応じて目標横位置を補正する学習値を算出することができる。
【0007】
一実施形態において、学習値算出部は、車両が右カーブ路を走行しているときの第2学習値である右学習値と、車両が左カーブ路を走行しているときの第2学習値である左学習値と、を算出してもよい。取付姿勢のズレが車両横位置の誤差に対して与える影響は、車両が右カーブ路を走行しているときと、車両が左カーブ路を走行しているときと、で必ずしも一律ではない。上記構成によれば、右カーブ路用の右学習値と左カーブ路用の左学習値とは、互いに異なる値として算出され得る。したがって、取付姿勢のズレに起因した車両横位置の誤差に対して、右カーブ路と左カーブ路とでの影響の大きさの違いに対応して、それぞれの第2学習値を算出することができる。
【0008】
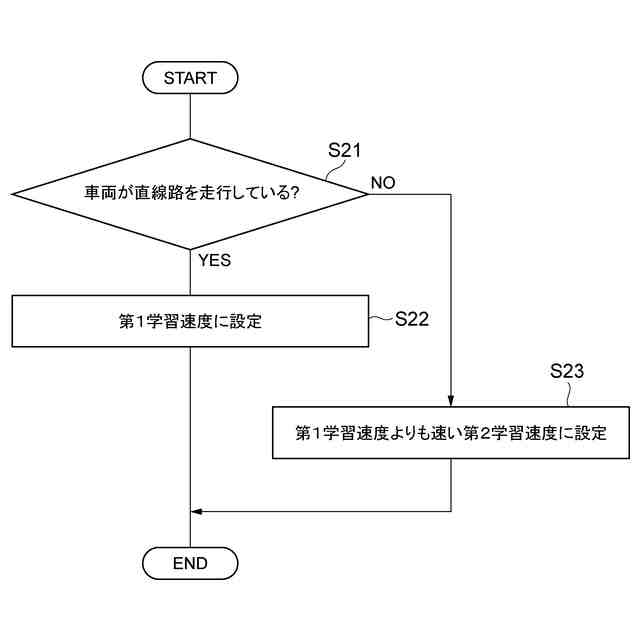
一実施形態において、学習値算出部は、第1学習値の学習速度よりも第2学習値の学習速度が速くなるように、学習値を算出してもよい。この場合、直線路を走行中での学習速度よりもカーブ路を走行中での学習速度を速くすることで、車両横位置の誤差への影響が大きい傾向があるカーブ路において早期に車両横位置を補正することができる。
【発明の効果】
【0009】
本開示の種々の態様によれば、取付姿勢のズレに起因した車両横位置の誤差への影響の大きさに応じて目標横位置を補正する学習値を算出することができる。
【図面の簡単な説明】
【0010】
実施形態に係る操舵制御装置を含む車両の一例の概略構成図である。
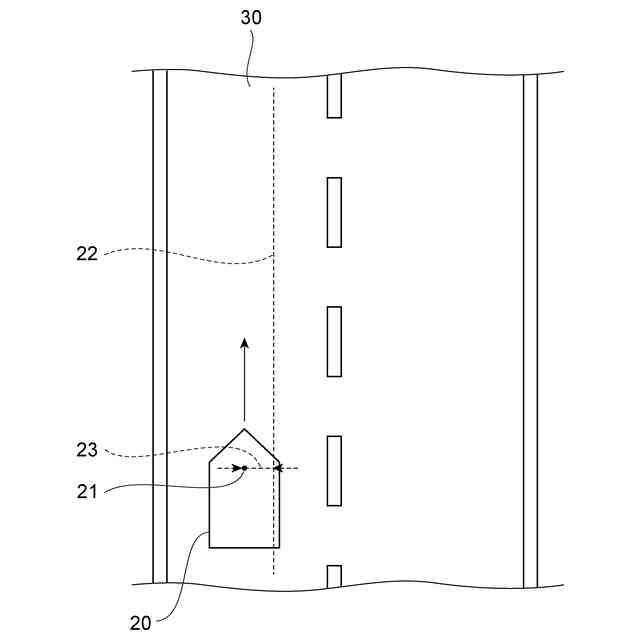
目標横位置からのズレ量に基づく目標横位置を補正する学習値の算出を説明するための平面図である。
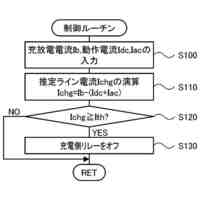
学習値の算出処理の一例を示すフローチャートである。
図3の第2学習値の算出処理の一例を示すフローチャートである。
学習速度の設定処理の一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
方法
3日前
トヨタ自動車株式会社
電池
18日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
電動車
18日前
トヨタ自動車株式会社
タンク
3日前
トヨタ自動車株式会社
電動車
19日前
トヨタ自動車株式会社
判定装置
18日前
トヨタ自動車株式会社
制御装置
18日前
トヨタ自動車株式会社
エンジン
19日前
トヨタ自動車株式会社
蓄電装置
11日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
反応容器
18日前
トヨタ自動車株式会社
蓄電装置
18日前
トヨタ自動車株式会社
蓄電装置
18日前
トヨタ自動車株式会社
蓄電装置
18日前
トヨタ自動車株式会社
エンジン
18日前
トヨタ自動車株式会社
蓄電装置
11日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
車両装置
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
塗工装置
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
エンジン
10日前
トヨタ自動車株式会社
蓄電装置
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ