TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025166042
公報種別
公開特許公報(A)
公開日
2025-11-05
出願番号
2025129843,2023553848
出願日
2025-08-04,2021-10-14
発明の名称
情報処理装置、制御方法、プログラム及び記憶媒体
出願人
パイオニア株式会社
,
パイオニアスマートセンシングイノベーションズ株式会社
代理人
個人
主分類
G08G
3/00 20060101AFI20251028BHJP(信号)
要約
【課題】船舶における自己位置推定の精度を向上させることが可能な情報処理装置を提供する。
【解決手段】情報処理装置は、予測位置取得手段と、推定位置算出手段と、信頼度算出手段と、速度算出手段と、を有する。予測位置取得手段は、船舶の予測位置を取得する。推定位置算出手段は、船舶に設けられた外界センサの出力に基づくデータと地図データとの照合に基づき、予測位置を更新した船舶の推定位置を算出する。信頼度算出手段は、照合の信頼度を算出する。速度算出手段は、第1処理時刻での前記推定位置と、第1処理時刻の直前の第2処理時刻での推定位置と、少なくとも信頼度に基づき設定した時定数とに基づき、第1処理時刻での船舶の速度を算出する。
【選択図】図13
特許請求の範囲
【請求項1】
船舶の予測位置を取得する予測位置取得手段と、
前記船舶に設けられた外界センサの出力に基づくデータと地図データとの照合に基づき、前記予測位置を更新した前記船舶の推定位置を算出する推定位置算出手段と、
前記照合の信頼度を算出する信頼度算出手段と、
第1処理時刻での前記推定位置と、前記第1処理時刻の直前の第2処理時刻での前記推定位置と、少なくとも前記信頼度に基づき設定した時定数とに基づき、前記第1処理時刻での前記船舶の速度を算出する速度算出手段と、
を有する情報処理装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、船舶の自己位置推定に関する。
続きを表示(約 3,900 文字)
【背景技術】
【0002】
レーザスキャナなどの計測装置を用いて計測した周辺物体の形状データを、予め周辺物体の形状が記憶された地図情報と照合(マッチング)することで、移動体の自己位置を推定する技術が従来知られている。例えば、特許文献1には、空間を所定の規則で分割したボクセル中における検出物が静止物か移動物かを判定し、静止物が存在するボクセルを対象として地図情報と計測データとのマッチングを行う自律移動システムが開示されている。また、特許文献2には、ボクセル毎の静止物体の平均ベクトルと共分散行列とを含むボクセルデータとライダが出力する点群データとの照合により自己位置推定を行うスキャンマッチング手法が開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開WO2013/076829
国際公開WO2018/221453
【発明の概要】
【発明が解決しようとする課題】
【0004】
昨今、自動車分野だけでなく、船舶においても、自動操船システム検討が進められており、安全な自動操船には精度の良い自己位置推定は同様に重要である。外洋では周辺に構造物が少ないためGNSS(Global Navigation Satellite System)により自己位置を測位可能であるが、都市部の沿岸や河川では高層ビル等が隣接するため、受信衛星数の低下やマルチパスなどによりGNSS電波の受信環境は悪く、精度の良い測位はできないことが多い。そのため、船舶においても、上記のスキャンマッチングによる高精度な自己位置推定を行うことができるように検討が進められている。
【0005】
しかし、船舶においては、潮流及び波の影響が推定位置の誤差となって現れることに起因し、自己位置推定の精度が低下してしまう、という課題が生じている。
【0006】
本発明は、上記の課題を解決するためになされたものであり、船舶における自己位置推定の精度を向上させることが可能な情報処理装置を提供することを主な目的とする。
【課題を解決するための手段】
【0007】
請求項に記載の発明は、情報処理装置であって、船舶の予測位置を取得する予測位置取得手段と、前記船舶に設けられた外界センサの出力に基づくデータと地図データとの照合に基づき、前記予測位置を更新した前記船舶の推定位置を算出する推定位置算出手段と、前記照合の信頼度を算出する信頼度算出手段と、第1処理時刻での前記推定位置と、前記第1処理時刻の直前の第2処理時刻での前記推定位置と、少なくとも前記信頼度に基づき設定した時定数とに基づき、前記第1処理時刻での前記船舶の速度を算出する速度算出手段と、有する。
【0008】
また、請求項に記載の発明は、コンピュータが実行する制御方法であって、船舶の予測位置を取得し、前記船舶に設けられた外界センサの出力に基づくデータと地図データとの照合に基づき、前記予測位置を更新した前記船舶の推定位置を算出し、前記照合の信頼度を算出し、第1処理時刻での前記推定位置と、前記第1処理時刻の直前の第2処理時刻での前記推定位置と、少なくとも前記信頼度に基づき設定した時定数とに基づき、前記第1処理時刻での前記船舶の速度を算出する。
【0009】
また、請求項に記載の発明は、プログラムであって、船舶の予測位置を取得し、前記船舶に設けられた外界センサの出力に基づくデータと地図データとの照合に基づき、前記予測位置を更新した前記船舶の推定位置を算出し、前記照合の信頼度を算出し、第1処理時刻での前記推定位置と、前記第1処理時刻の直前の第2処理時刻での前記推定位置と、少なくとも前記信頼度に基づき設定した時定数とに基づき、前記第1処理時刻での前記船舶の速度を算出する処理をコンピュータに実行させる。
【図面の簡単な説明】
【0010】
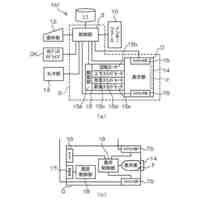
第1実施例に係る運転支援システムの概略構成を示す図。
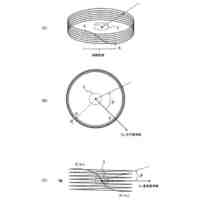
自己位置推定に用いられる角速度を説明するための図。
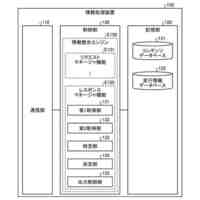
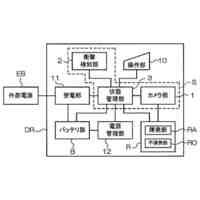
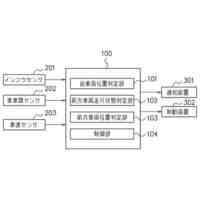
第1実施例に係る情報処理装置のハードウェア構成の一例を示すブロック図。
自己位置推定部が推定すべき自己位置を3次元直交座標で表した図。
ボクセルデータVDの概略的なデータ構造の一例を示す図。
自己位置推定部により行われる処理の一例を説明するための図。
信頼度値NRVと信頼度指標NRIとの関係を表す図。
信頼度指標NRIと時定数τとの関係を示す図。
信頼度値NRVと時定数τとの関係を示す図。
フィルタ無しの状態でワールド座標系における速度を算出した場合の例を示す図。
フィルタの時定数τを固定した状態でワールド座標系における速度を算出した場合の例を示す図。
フィルタ無しの状態でワールド座標系における速度を算出した場合の例を示す図。
フィルタの時定数τを固定した状態でワールド座標系における速度を算出した場合の例を示す図。
フィルタ無しの状態でワールド座標系における速度を算出した場合の例を示す図。
フィルタの時定数τを変化させつつワールド座標系における速度を算出した場合の例を示す図。
フィルタ無しの状態で船舶の自己位置推定を行った場合の例を説明するための図。
フィルタ有りの状態で船舶の自己位置推定を行った場合の例を説明するための図。
フィルタ有りの状態で船舶の自己位置推定を行った場合の例を説明するための図。
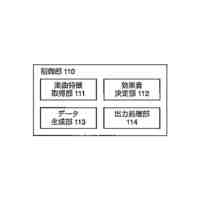
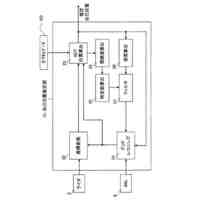
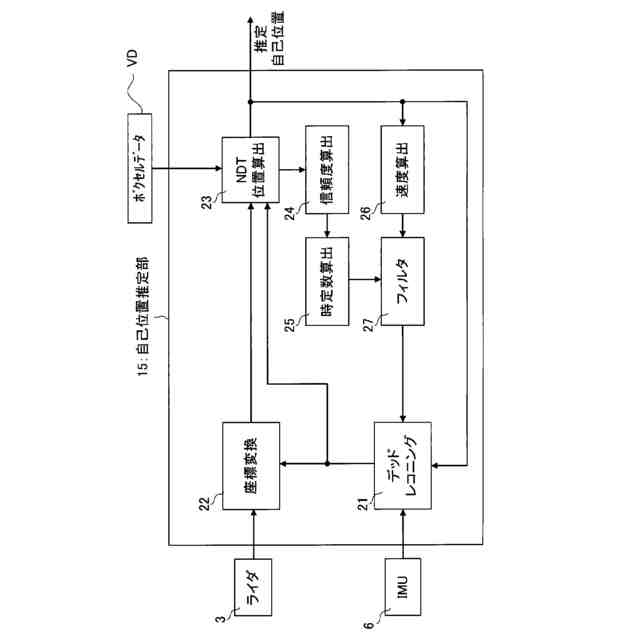
第1実施例に係る自己位置推定部の機能ブロックの一例を示す図。
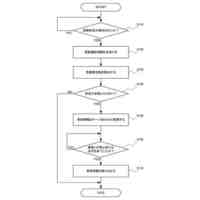
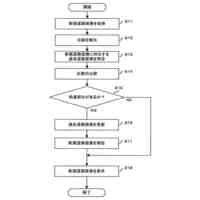
自己位置推定処理の手順の一例を示すフローチャート。
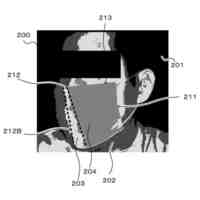
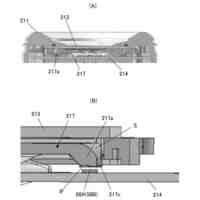
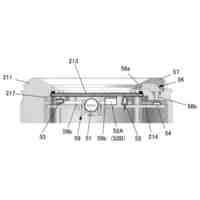
実験時におけるライダの設置状態及びスキャン範囲を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ無しの状態で速度を算出する比較例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
フィルタ有りの状態で速度を算出する実施例に係る自己位置推定結果を示す図。
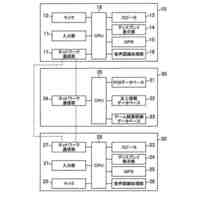
第2実施例に係る運転支援システムの概略構成を示す図。
第2実施例に係る情報処理装置のハードウェア構成の一例を示すブロック図。
第2実施例に係る自己位置推定部の機能ブロックの一例を示す図。
加速度センサにより計測された加速度をワールド座標系の加速度に変換する際に行われる演算の概要を示す図。
第3実施例に係る情報処理装置のハードウェア構成の一例を示すブロック図。
第3実施例に係る自己位置推定部の機能ブロックの一例を示す図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
パイオニア株式会社
光制御装置
16日前
パイオニア株式会社
光制御装置
16日前
パイオニア株式会社
情報処理装置
23日前
パイオニア株式会社
情報表示装置
4日前
パイオニア株式会社
情報処理装置
1か月前
パイオニア株式会社
情報処理装置
23日前
パイオニア株式会社
情報処理装置
24日前
パイオニア株式会社
効果音出力装置
1か月前
パイオニア株式会社
情報処理装置、端末装置
23日前
パイオニア株式会社
認識装置、認識方法及び認識プログラム
12日前
パイオニア株式会社
制御装置、制御方法及び制御用プログラム
23日前
パイオニア株式会社
撮影装置、制御方法、プログラム及び記憶媒体
23日前
パイオニア株式会社
表示装置、表示方法、プログラム、及び、記憶媒体
25日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
25日前
パイオニア株式会社
情報処理装置、判定方法、プログラム及び記憶媒体
2日前
パイオニア株式会社
情報処理装置、情報処理方法及び情報処理プログラム
1か月前
パイオニア株式会社
制御装置、制御方法、および、制御装置用プログラム
1か月前
パイオニア株式会社
情報記録装置、情報記録方法及び情報記録用プログラム
16日前
パイオニア株式会社
車載装置、情報処理方法、情報管理装置及び情報管理方法
2日前
パイオニア株式会社
携帯端末装置、情報処理装置、連携システム及び表示制御方法
9日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記録媒体
25日前
パイオニア株式会社
地点検索方法、地点検索プログラム、地点検索記憶媒体および地点検索装置
1か月前
パイオニア株式会社
情報処理装置、広告情報提示装置及びこれらの装置によって実行される方法
1か月前
パイオニア株式会社
通信端末、通信方法、通信プログラム、通信プログラムを格納した記録媒体および情報処理装置
2日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び情報処理プログラムを記録したコンピュータ読み取り可能な記録媒体
4日前
日本精機株式会社
警報システム
3か月前
個人
安全支援装置
25日前
株式会社SUBARU
車両
1か月前
個人
自動電動車椅子
2か月前
スズキ株式会社
運転支援装置
2か月前
エムケー精工株式会社
車両誘導装置
3か月前
株式会社国際電気
防災システム
3か月前
ニッタン株式会社
検知器
2か月前
ニッタン株式会社
検知器
2か月前
ニッタン株式会社
検知器
2か月前
日本無線株式会社
船舶システム
26日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ