TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025165502
公報種別
公開特許公報(A)
公開日
2025-11-05
出願番号
2024069571
出願日
2024-04-23
発明の名称
センサマット構造、把持検知システム
出願人
豊田合成株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B62D
1/04 20060101AFI20251028BHJP(鉄道以外の路面車両)
要約
【課題】車両のハンドルにおけるタッチセンサにおいて、実際には運転者がハンドルを把持していないにも拘わらず、ハンドルが把持されていると検知される虞があった。
【解決手段】タッチセンサのセンサマット構造であって、把持部は、操舵部が車両の直進方向を指示する基本状態において、操舵部の回転軸方向と車両の上下方向を含む第1平面について対称な形状を有し、タッチセンサは、運転者の把持を検知し、センサマット構造は、導電布層を備え、導電布層は、基本状態における回転軸方向と車両の左右方向とを含む第2平面よりも車両の下方向の側に位置する第1検知範囲に、少なくとも設けられる第1導電布と、第1検知範囲より車両の上方向の側に位置する第2検知範囲に設けられる第2導電布と、を含み、第1導電布は、第2導電布の素材と同一の素材で構成されており、第2導電布よりも厚く構成されている、センサマット構造。
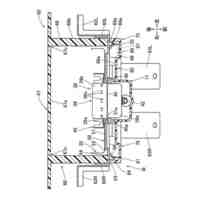
【選択図】図5
特許請求の範囲
【請求項1】
車両の進行方向を指示するための操舵部において、運転者に把持される把持部に設けられるタッチセンサのセンサマット構造であって、
前記操舵部は、前記車両に対して回転可能に取り付けられており、
前記把持部は、前記操舵部が前記車両の直進方向を指示する基本状態において、前記操舵部の回転軸方向と前記車両の上下方向を含む第1平面について対称な形状を有し、
前記タッチセンサは、
複数の検知範囲を有し、前記複数の検知範囲のそれぞれにおいて、前記運転者の接近による静電容量の変化に基づいて前記運転者の把持を検知し、
前記センサマット構造は、
導電性を有する素材より構成されている導電布層を備え、
前記導電布層は、前記複数の検知範囲に設けられ、
前記複数の検知範囲のうち、前記基本状態における前記回転軸方向と前記車両の左右方向とを含む第2平面よりも前記車両の下方向の側に位置する第1検知範囲に、少なくとも設けられる第1導電布と、
前記把持部における前記把持部を通り前記操舵部の回転軸に垂直な第3平面に対して前記第1導電布が設けられている側において、前記複数の検知範囲のうち、前記操舵部が前記基本状態にあるとき前記第1検知範囲より前記車両の上方向の側に位置する第2検知範囲に設けられる第2導電布と、を含み、
前記第1導電布は、前記第2導電布の素材と同一の素材で構成されており、前記第2導電布よりも厚く構成されている、センサマット構造。
続きを表示(約 1,200 文字)
【請求項2】
請求項1記載のセンサマット構造であって、
前記第1導電布は、前記第3平面に対して前記運転者に面していない裏側にのみ設けられる、センサマット構造。
【請求項3】
請求項2記載のセンサマット構造であって、
前記第1導電布は、前記把持部において前記第1検知範囲にのみに設けられる、センサマット構造。
【請求項4】
請求項3記載のセンサマット構造であって、
前記把持部は、環状であり、
前記第1導電布は、前記表側から見た場合の前記基本状態の前記把持部において、前記操舵部の回転軸を中心とする時計における4時から8時の円弧状の部位にのみ設けられている、センサマット構造。
【請求項5】
把持検知システムであって、
車両のステアリング装置に設けられ、前記車両の進行方向を指示するため前記車両に対して回転可能に取り付けられている操舵部であって、前記車両の運転者に把持される把持部を有する操舵部と、
情報を出力する出力部と、
複数の検知範囲を有し、前記複数の検知範囲のそれぞれにおいて、前記運転者の接近による静電容量の変化に基づいて前記運転者の把持を検知するタッチセンサと、
制御部と、を備え、
前記把持部は、
前記操舵部が前記車両の直進方向を指示する基本状態において、前記操舵部の回転軸方向と前記車両の上下方向を含む第1平面について対称な形状を有し、
前記タッチセンサは、
前記把持部の形状に沿って設けられ、
前記把持部の断面において、導電性を有する素材より構成されている導電布層を備え、
前記導電布層は、前記複数の検知範囲に設けられ、
前記複数の検知範囲のうち、前記基本状態における前記回転軸方向と前記車両の左右方向とを含む第2平面よりも前記車両の下方向の側に位置する第1検知範囲に、少なくとも設けられる第1導電布と、
前記把持部における前記把持部を通り前記操舵部の回転軸に垂直な第3平面に対して前記第1導電布が設けられている側において、前記複数の検知範囲のうち、前記操舵部が前記基本状態にあるとき前記第1検知範囲より前記車両の上方向の側に位置する第2検知範囲に設けられる第2導電布と、を含み、
前記第1導電布は、前記第2導電布の素材と同一の素材で構成されており、前記第2導電布よりも厚く構成されており、
前記制御部は、
前記運転者により前記第2平面に重なる前記把持部の断面を含む予め定められた基準範囲が把持される場合、前記運転者による前記把持部の把持を検知し、
前記運転者による把持を検知しない場合、前記出力部により、前記把持部が把持されていないことを表す出力を行い、
前記運転者による把持を検知する場合、前記出力部による出力を行わない、把持検知システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、センサマット構造、把持検知システムに関する。
続きを表示(約 4,500 文字)
【背景技術】
【0002】
車両のハンドルにおいて、例えば、特許文献1に記載されているように、ハンドルに設けられたタッチセンサにより、運転者がハンドルを把持しているか否かを検知する技術が存在する。このような技術は、例えば、LTA(Lane Tracing Assist:車線逸脱防止支援システム)やLCA(Lane Change Assist:車線変更支援システム)を含む高度運転支援システムの作動中に、運転者にハンドルの把持を要求するために用いられる。
【0003】
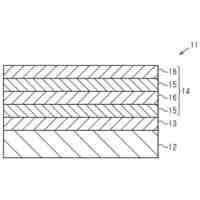
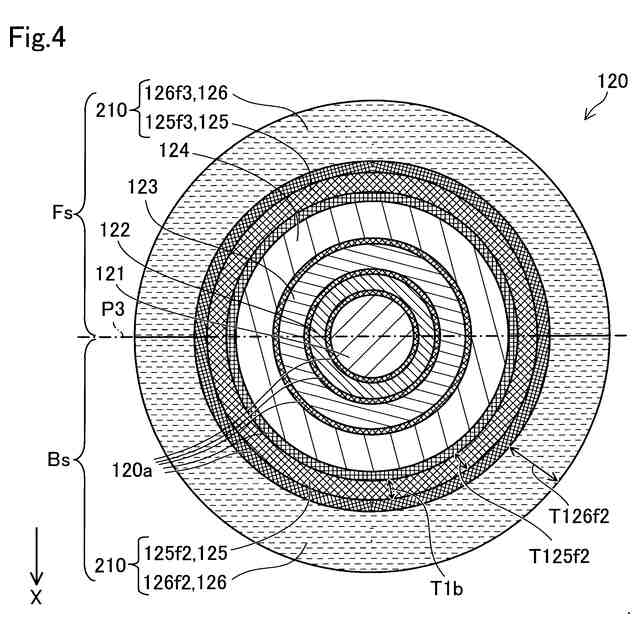
タッチセンサが設けられたハンドルは、積層構造を有する。例えば、ハンドルは、最外層を革で覆われている。さらに、ハンドルは、内層に導電性の布である導電布を有する。タッチセンサは、ハンドルの最外層に接近する運転者の手と導電布とによる静電容量の変化を検知する。これにより、タッチセンサは、ハンドルが把持されているか否かを検知する。ハンドルにおける導電布から最外層までの構造を、「センサマット構造」と呼ぶ。
【先行技術文献】
【特許文献】
【0004】
特開2023-055420号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、運転者の手以外が触れることによっても静電容量は、変化する。このため、タッチセンサは、例えば、運転者の膝がハンドルに触れることにより生じる静電容量の変化も検知する。
【0006】
すなわち、従来のセンサマット構造では、実際には運転者がハンドルを把持していないにも拘わらず、ハンドルが把持されていると検知される虞があった。
【課題を解決するための手段】
【0007】
本開示は、以下の形態として実現することが可能である。
【0008】
(1)本開示の一形態によれば、センサマット構造が提供される。このセンサマット構造は、車両の進行方向を指示するための操舵部において、運転者に把持される把持部に設けられるタッチセンサのセンサマット構造であって、前記操舵部は、前記車両に対して回転可能に取り付けられており、前記把持部は、前記操舵部が前記車両の直進方向を指示する基本状態において、前記操舵部の回転軸方向と前記車両の上下方向を含む第1平面について対称な形状を有し、前記タッチセンサは、複数の検知範囲を有し、前記複数の検知範囲のそれぞれにおいて、前記運転者の接近による静電容量の変化に基づいて前記運転者の把持を検知し、前記センサマット構造は、導電性を有する素材より構成されている導電布層を備え、前記導電布層は、前記複数の検知範囲に設けられ、前記複数の検知範囲のうち、前記基本状態における前記回転軸方向と前記車両の左右方向とを含む第2平面よりも前記車両の下方向の側に位置する第1検知範囲に、少なくとも設けられる第1導電布と、前記把持部における前記把持部を通り前記操舵部の回転軸に垂直な第3平面に対して前記第1導電布が設けられている側において、前記複数の検知範囲のうち、前記操舵部が前記基本状態にあるとき前記第1検知範囲より前記車両の上方向の側に位置する第2検知範囲に設けられる第2導電布と、を含み、前記第1導電布は、前記第2導電布の素材と同一の素材で構成されており、前記第2導電布よりも厚く構成されている。
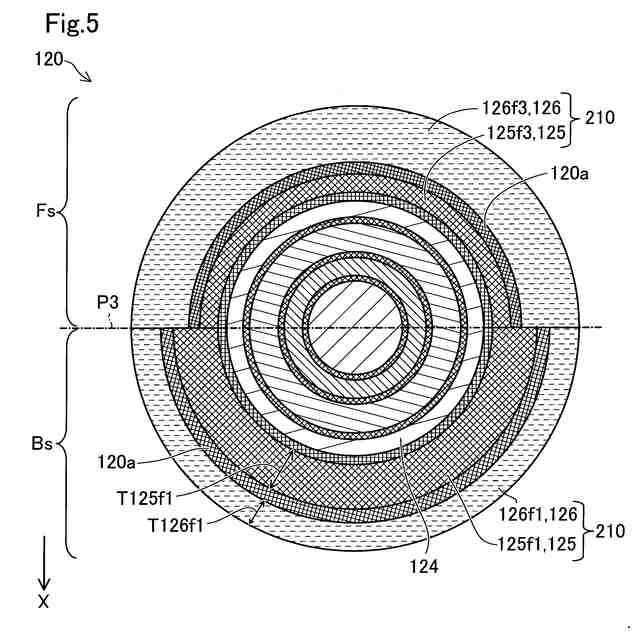
このような形態とすることで、タッチセンサは、導電布の厚みが異なる第1導電布と第2導電布により、運転者の把持を検知する。タッチセンサでは、把持部に運転者が接近することにより、導電布の表面に電荷が集中する。導電布の厚みが薄いほど、電荷が導電布の表面に集中しやすくなり、運転者と導電布の間に、より強い電場が発生しやすくなる。すなわち、導電布の厚みが薄いほど、静電容量が変化しやすくなる。そして、導電布の厚みが厚いほど、静電容量が変化しにくくなる。このため、素材が同一であるとき、第1導電布における静電容量の変化は、第2導電布における静電容量の変化よりも鈍くなる。第1導電布は、少なくとも第1検知範囲に設けられる。着座した運転者の脚は、把持部における車両の下方向の側に位置するため、運転者が脚を組む際に、把持部の下の第1検知範囲に接触する可能性が高い。しかし、第1導電布の静電容量の変化は、第2導電布の静電容量の変化よりも変化しにくい。すなわち、運転者の脚が把持部に接触しても、検知されにくい。よって、この形態のセンサマット構造は、運転者が把持していないにも拘わらず、把持部が把持されていると誤って検知されることを抑制できる。
(2)上記形態のセンサマット構造において、前記第1導電布は、前記把持部において、前記第3平面に対して前記運転者に面していない裏側にのみ設けられてもよい。
このような形態とすることで、第1導電布は、把持部において膝の接触する可能性の高い側のみに設けられる。したがって、この形態のセンサマット構造は、第1導電布が表側にも設けられる形態よりも、第1導電布を小さくできる。すなわち、この形態のセンサマット構造は、把持部の感度を鈍くする範囲を小さくできるため、把持部が把持されていると誤って検知されることを抑制しつつ、運転者の把持を検知しやすくできる。
(3)上記形態のセンサマット構造において、前記第1導電布は、前記把持部において前記第1検知範囲にのみに設けられてもよい。
このような形態においては、第1導電布は、把持部の裏側における第1検知範囲にのみに設けられる。これにより、この形態のセンサマット構造は、第1検知範囲以外にも第1導電布が設けられる形態よりも、把持部の感度を鈍くする範囲を小さくできる。よって、この形態のセンサマット構造は、より運転者の把持を検知しやすくできる。
(4)上記形態のセンサマット構造において、前記把持部は、環状であり、前記第1導電布は、前記表側から見た場合の前記基本状態の前記把持部において、前記操舵部の回転軸を中心とする時計における4時から8時の円弧状の部位にのみ設けられていてもよい。
このような形態とすることで、第1導電布は、第1検知範囲によりも、より小さい範囲に設けられる。すなわち、この形態のセンサマット構造は、把持部の感度を鈍くする範囲を小さくできる。よって、この形態のセンサマット構造は、より運転者の把持を検知しやすくできる。
(5)本開示の他の形態によれば、把持検知システムが提供される。この把持検知システムは、車両のステアリング装置に設けられ、前記車両の進行方向を指示するため前記車両に対して回転可能に取り付けられている操舵部であって、前記車両の運転者に把持される把持部を有する操舵部と、情報を出力する出力部と、複数の検知範囲を有し、前記複数の検知範囲のそれぞれにおいて、前記運転者の接近による静電容量の変化に基づいて前記運転者の把持を検知するタッチセンサと、制御部と、を備え、前記把持部は、前記操舵部が前記車両の直進方向を指示する基本状態において、前記操舵部の回転軸方向と前記車両の上下方向を含む第1平面について対称な形状を有し、前記タッチセンサは、前記把持部の形状に沿って設けられ、前記把持部の断面において、導電性を有する素材より構成されている導電布層を備え、前記導電布層は、前記複数の検知範囲に設けられ、前記複数の検知範囲のうち、前記基本状態における前記回転軸方向と前記車両の左右方向とを含む第2平面よりも前記車両の下方向の側に位置する第1検知範囲に、少なくとも設けられる第1導電布と、前記把持部における前記把持部を通り前記操舵部の回転軸に垂直な第3平面に対して前記第1導電布が設けられている側において、前記複数の検知範囲のうち、前記操舵部が前記基本状態にあるとき前記第1検知範囲より前記車両の上方向の側に位置する第2検知範囲に設けられる第2導電布と、を含み、前記第1導電布は、前記第2導電布の素材と同一の素材で構成されており、前記第2導電布よりも厚く構成されており、前記制御部は、前記運転者により前記第2平面に重なる前記把持部の断面を含む予め定められた基準範囲が把持される場合、前記運転者による前記把持部の把持を検知し、前記運転者による把持を検知しない場合、前記出力部により、前記把持部が把持されていないことを表す出力を行い、前記運転者による把持を検知する場合、前記出力部による出力を行わない。
このような形態においては、把持検知システムは、基本状態の把持部において下の第1検知範囲よりも、第2検知範囲の把持を検知しやすいように設計される。さらに、第1導電布が第2導電布よりも厚いため、第1検知範囲は、把持を検知されにくい。着座した運転者の脚は、把持部における車両の下方向の側に位置するため、運転者が脚を組む際に、把持部の下の第1検知範囲に接触する可能性が高い。よって、この形態の把持検知システムは、運転者が把持していないにも拘わらず、把持部が把持されていると誤って検知されることを抑制できる。さらに、運転者は、手動による車両の操舵を開始する際に、第2検知範囲を把持する可能性が高い。この形態の把持検知システムは、把持される可能性の高い範囲を検知されやすくできる。
【図面の簡単な説明】
【0009】
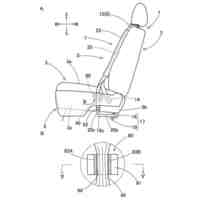
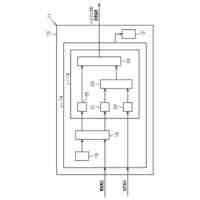
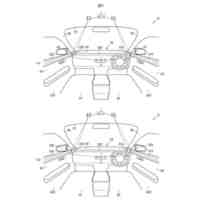
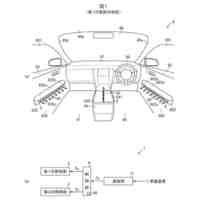
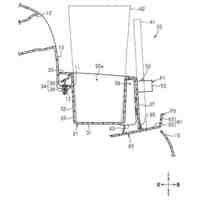
第1実施形態の把持検知システムを示す説明図である。
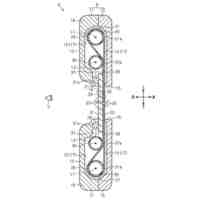
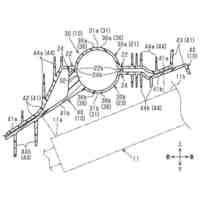
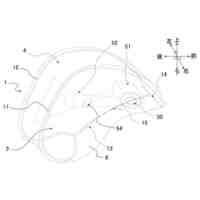
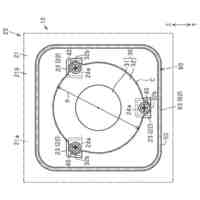
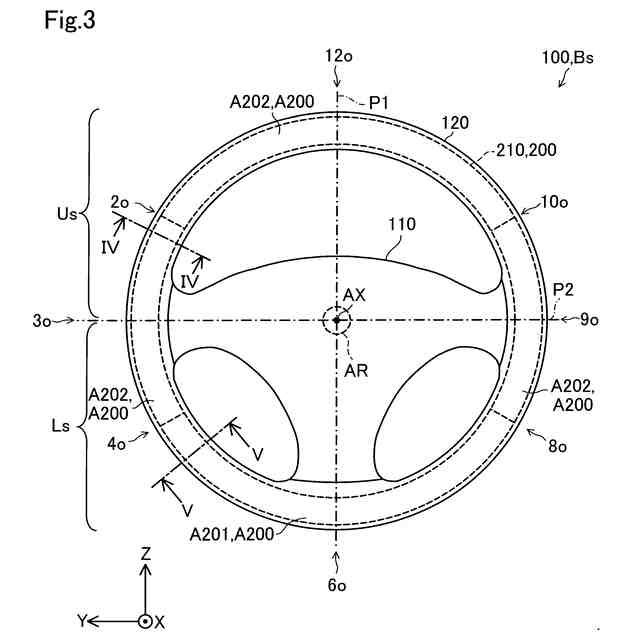
操舵部の表側を示す説明図である。
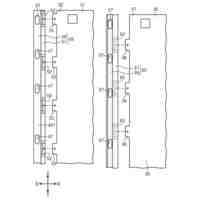
操舵部の裏側を示す説明図である。
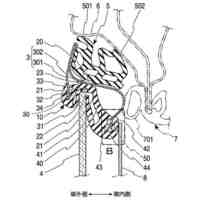
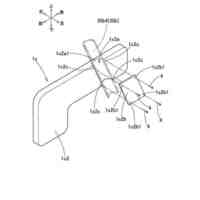
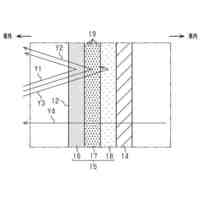
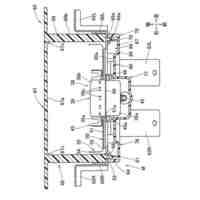
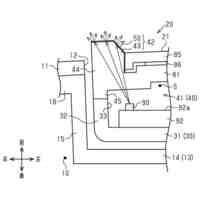
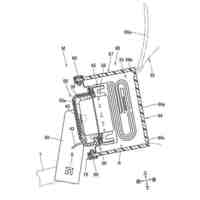
図2と図3のIV-IV断面図である。
図2と図3のV-V断面図である。
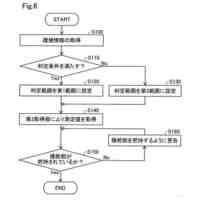
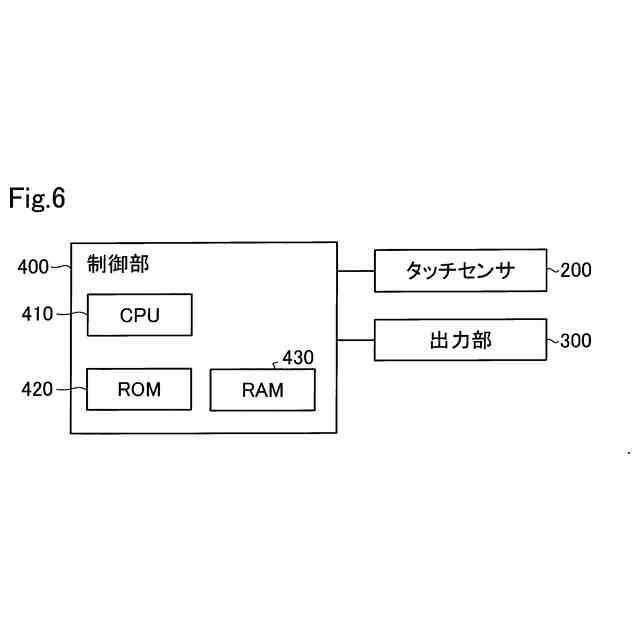
第1実施形態の制御部の構成を表すブロック図である。
【発明を実施するための形態】
【0010】
A.第1実施形態:
図1は、第1実施形態の把持検知システム10を示す説明図である。把持検知システム10は、例えば、高度運転支援システムを備えている車両Mに設けられる。高度運転支援システムは、LTA(Lane Tracing Assist:車線逸脱防止支援システム)、LCA(Lane Change Assist:車線変更支援システム)、運転者DRの操作を必要としない自動運転などを含む。なお、本明細書において、手動運転とは、高度運転支援システムが作動していない状態において運転者DRが車両Mを操作することを意味する。図1では、高度運転支援システムにより運転が行われていることを表すため、運転者DRが操舵部100を把持していない状態が図示されている。把持検知システム10は、高度運転支援システムによる運転から手動運転への移行する際に、運転者DRに把持部120を把持していることを要求する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
豊田合成株式会社
積層体
1か月前
豊田合成株式会社
調光装置
1か月前
豊田合成株式会社
調光装置
1か月前
豊田合成株式会社
調光装置
17日前
豊田合成株式会社
半導体素子
1か月前
豊田合成株式会社
ガラスラン
2か月前
豊田合成株式会社
光デバイス
3日前
豊田合成株式会社
外装パネル
2日前
豊田合成株式会社
乗員保護装置
1か月前
豊田合成株式会社
車両用外装品
1か月前
豊田合成株式会社
乗員保護装置
2か月前
豊田合成株式会社
乗員保護装置
2日前
豊田合成株式会社
乗員保護装置
1か月前
豊田合成株式会社
検知システム
1か月前
豊田合成株式会社
車両用ビーム
1か月前
豊田合成株式会社
車両用ビーム
1か月前
豊田合成株式会社
車両用外装品
1か月前
豊田合成株式会社
乗員保護装置
2日前
豊田合成株式会社
流体殺菌装置
17日前
豊田合成株式会社
乗員保護装置
2日前
豊田合成株式会社
制御ユニット
9日前
豊田合成株式会社
立体エアバッグ
2か月前
豊田合成株式会社
車両用発光装置
1か月前
豊田合成株式会社
エアバッグ装置
9日前
豊田合成株式会社
エアバッグ装置
9日前
豊田合成株式会社
車両用投影装置
1か月前
豊田合成株式会社
エアバッグ装置
2日前
豊田合成株式会社
車両用投影装置
1か月前
豊田合成株式会社
車両用照明装置
1か月前
豊田合成株式会社
車両用発光装置
1か月前
豊田合成株式会社
車両用発光装置
1か月前
豊田合成株式会社
エアバッグ装置
1か月前
豊田合成株式会社
車両用ホルダ装置
11日前
豊田合成株式会社
把持検知システム
2か月前
豊田合成株式会社
車両の音出力装置
1か月前
豊田合成株式会社
車両の音出力装置
2日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ