TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025165184
公報種別
公開特許公報(A)
公開日
2025-11-04
出願番号
2024069139
出願日
2024-04-22
発明の名称
走行軌跡生成装置、走行軌跡生成方法、及び走行軌跡生成プログラム
出願人
株式会社豊田中央研究所
,
トヨタ自動車株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
G08G
1/16 20060101AFI20251027BHJP(信号)
要約
【課題】移動体の走行軌跡データを複数の領域に分割して補正する際に、走行軌跡データに発生する誤差を低減させる。
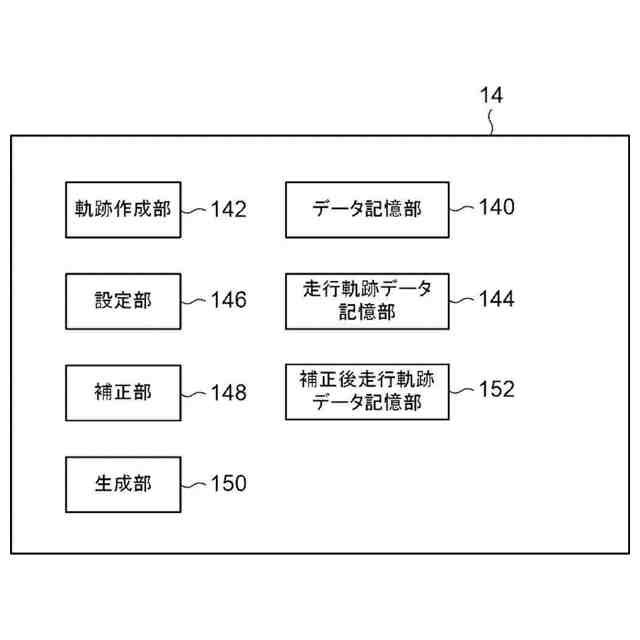
【解決手段】走行軌跡生成装置は、複数の移動体の各々の走行軌跡データに対して、走行軌跡データに沿った箇所に位置する複数の領域であって、かつ隣接する領域と重複領域を有する複数の領域を設定する。走行軌跡生成装置は、複数の移動体の各々の走行軌跡データに写る周辺物標に基づいて、設定された複数の領域の各々に写る走行軌跡データを補正する。走行軌跡生成装置は、複数の移動体の各々の走行軌跡データに設定された隣接する領域のペアの各々について、ペアのうちの第1の領域内の重複領域に写る走行軌跡データ内の移動体と、ペアのうちの第2の領域内の重複領域に写る走行軌跡データ内の移動体とが一致するように、ペアのうちの少なくとも一方の領域の位置又は傾きを補正して、複数の移動体の各々の走行軌跡データを補正する。
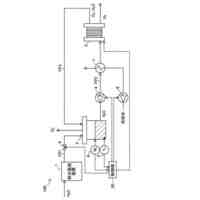
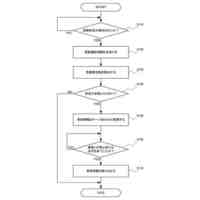
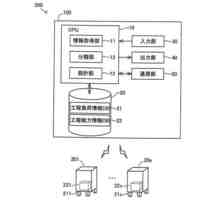
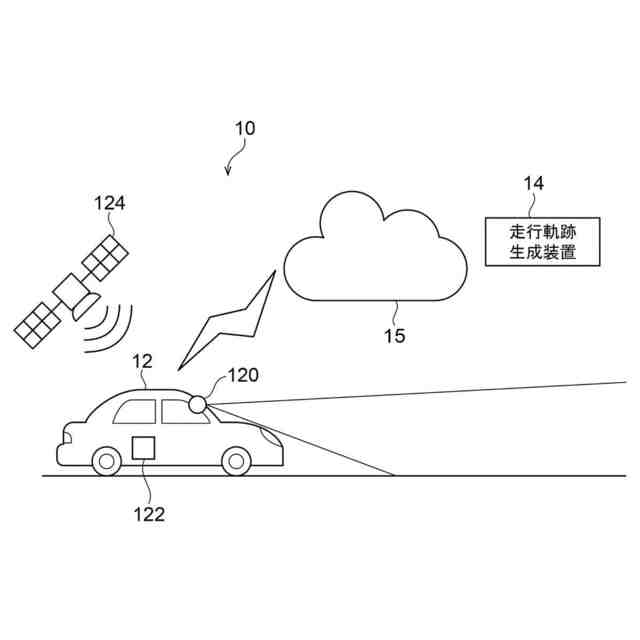
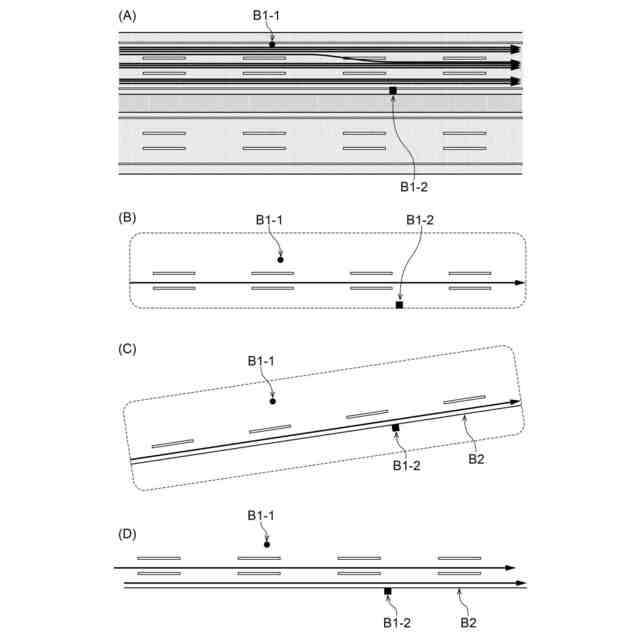
【選択図】図1
特許請求の範囲
【請求項1】
複数の移動体の各々の走行軌跡データに対して、前記走行軌跡データに沿った箇所に位置する複数の領域であって、かつ隣接する領域と重複領域を有する複数の領域を設定する設定部と、
複数の移動体の各々の走行軌跡データに写る周辺物標に基づいて、設定された複数の領域の各々に写る走行軌跡データを補正する補正部と、
複数の移動体の各々の走行軌跡データに設定された隣接する領域のペアの各々について、ペアのうちの第1の領域内の前記重複領域に写る走行軌跡データ内の移動体と、ペアのうちの第2の領域内の前記重複領域に写る走行軌跡データ内の移動体とが一致するように、ペアのうちの少なくとも一方の領域の位置又は傾きを補正して、複数の移動体の各々の走行軌跡データを補正することにより、複数の移動体の各々の走行軌跡データを生成する生成部と、
を備えた走行軌跡生成装置。
続きを表示(約 1,900 文字)
【請求項2】
前記生成部は、
前記領域のペアの各々について、前記ペアのうちの第1の領域内の前記重複領域に写る走行軌跡データ内の移動体と、前記ペアのうちの第2の領域内の前記重複領域に写る走行軌跡データ内の移動体とが一致するように、前記ペアのうちの少なくとも一方の領域の位置又は傾きを補正した後に、第1の領域内の前記重複領域に写る移動体の位置と第2の領域内の前記重複領域に写る移動体の位置との間の残差を計算し、前記残差が小さいほど大きくなるような値を、移動体の位置情報の信頼度を表す移動体位置信頼度として算出し、
複数の移動体の各々の走行軌跡データのうち、前記移動体位置信頼度が所定閾値以下である走行軌跡データを除外する、
請求項1に記載の走行軌跡生成装置。
【請求項3】
前記生成部は、
複数の移動体の各々の走行軌跡データのうち、前記移動体位置信頼度が所定閾値以下である走行軌跡データを除外した後に、
前記領域のペアの各々について、前記ペアのうちの少なくとも一方の領域の位置又は傾きを補正して、複数の移動体の各々の走行軌跡データを補正することにより、複数の移動体の各々の走行軌跡データを生成する、
請求項2に記載の走行軌跡生成装置。
【請求項4】
前記生成部は、
前記領域のペアの各々について、前記ペアのうちの第1の領域内の前記重複領域に写る走行軌跡データ内の移動体と、前記ペアのうちの第2の領域内の前記重複領域に写る走行軌跡データ内の移動体とが一致するように、前記ペアのうちの少なくとも一方の領域の位置又は傾きを補正した後に、第1の領域内の前記重複領域に写る移動体の位置と第2の領域内の前記重複領域に写る移動体の位置との間の残差を計算し、前記残差が小さいほど大きくなるような値を、前記領域のペアに対する信頼度表す領域信頼度として算出し、
複数の移動体の各々の走行軌跡データのうち、前記領域信頼度が所定閾値以下である前記領域のペアを除外する、
請求項1に記載の走行軌跡生成装置。
【請求項5】
前記生成部は、
複数の移動体の各々の走行軌跡データのうち、前記領域信頼度が所定閾値以下である前記領域のペアを除外した後に、
前記領域のペアの各々について、前記ペアのうちの少なくとも一方の領域の位置又は傾きを補正して、複数の移動体の各々の走行軌跡データを補正することにより、複数の移動体の各々の走行軌跡データを生成する、
請求項4に記載の走行軌跡生成装置。
【請求項6】
複数の移動体の各々の走行軌跡データに対して、前記走行軌跡データに沿った箇所に位置する複数の領域であって、かつ隣接する領域と重複領域を有する複数の領域を設定し、
複数の移動体の各々の走行軌跡データに写る周辺物標に基づいて、設定された複数の領域の各々に写る走行軌跡データを補正し、
複数の移動体の各々の走行軌跡データに設定された隣接する領域のペアの各々について、ペアのうちの第1の領域内の前記重複領域に写る走行軌跡データ内の移動体と、ペアのうちの第2の領域内の前記重複領域に写る走行軌跡データ内の移動体とが一致するように、ペアのうちの少なくとも一方の領域の位置又は傾きを補正して、複数の移動体の各々の走行軌跡データを補正することにより、複数の移動体の各々の走行軌跡データを生成する、
処理をコンピュータが実行する走行軌跡生成方法。
【請求項7】
コンピュータを、
複数の移動体の各々の走行軌跡データに対して、前記走行軌跡データに沿った箇所に位置する複数の領域であって、かつ隣接する領域と重複領域を有する複数の領域を設定する設定部、
複数の移動体の各々の走行軌跡データに写る周辺物標に基づいて、設定された複数の領域の各々に写る走行軌跡データを補正する補正部、及び
複数の移動体の各々の走行軌跡データに設定された隣接する領域のペアの各々について、ペアのうちの第1の領域内の前記重複領域に写る走行軌跡データ内の移動体と、ペアのうちの第2の領域内の前記重複領域に写る走行軌跡データ内の移動体とが一致するように、ペアのうちの少なくとも一方の領域の位置又は傾きを補正して、複数の移動体の各々の走行軌跡データを補正することにより、複数の移動体の各々の走行軌跡データを生成する生成部
として機能させるための走行軌跡生成プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、走行軌跡生成装置、走行軌跡生成方法、及び走行軌跡生成プログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1には、複数の移動軌跡の相対的な配置を高い精度で特定する軌跡解析装置が開示されている。特許文献1に開示されている軌跡解析装置は、複数の端末装置それぞれについて移動開始時の位置からの変位および移動開始時の向きからの偏角を時系列的に示す移動情報に基づいて、各端末装置の軌跡を生成する。そして、軌跡解析装置は、信号源から前記各端末装置に到来した信号の強度を時系列的に示す強度情報を収集し、端末装置ごとに収集された強度情報で示される信号の強度の時間変化に基づいて、所定の参照地点を各端末装置が通過した時刻を示す参照時刻を推定する。軌跡解析装置は、各端末装置に対応して生成された軌跡から、当該端末装置に対応する参照時刻を含む所定の期間に端末装置が移動した範囲を参照範囲として抽出する。そして、軌跡解析装置は、各端末装置の軌跡から抽出された参照範囲の位相幾何学的な特徴を照合することにより、複数の軌跡の相対位置を特定する。
【0003】
また、特許文献2には、補正が行われた走行軌跡を構成する軌跡同士が近接している領域を検出することによって、自律移動装置が重複して走行した領域である重複走行領域の検出を行う自律移動システムが開示されている。この自律移動システムは、重複走行領域における走行軌跡上の相対座標を複数選択し、選択された各相対座標に対応付けられている環境情報同士を互いに比較することによって、選択された各相対座標間における第1の相対的な位置関係を算出し、算出した第1の相対的な位置関係と、絶対座標と、の両者に基づく第2の誤差評価値を算出し、相対座標により得られる自律移動装置の走行軌跡または第1の補正が行われた走行軌跡を、当該第2の誤差評価値に基づいて変形させることで、走行軌跡を補正する。
【先行技術文献】
【特許文献】
【0004】
特開2013-217802号公報
特許5930346号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
移動体の位置の変化量及び姿勢の変化量を積算して走行軌跡データを生成する場合には、その走行軌跡が長くなるにつれて、移動体の位置及び姿勢の推定結果に対して誤差が発生し、その誤差は走行軌跡データへ反映される。このため、移動体の位置及び姿勢の変化量を積算して、長い走行軌跡データを生成する場合には、走行軌跡データの形状に歪みが生じる。
【0006】
そのため、例えば、走行軌跡が長い走行軌跡データを生成する際に、特許文献1に開示されているような技術を利用した場合には、走行軌跡データに歪みが発生してしまう。
【0007】
一方、走行軌跡データに含まれる各地点の領域における移動体の位置及び姿勢の推定精度を高めるために、走行軌跡データを小領域に分割し、小領域毎に走行軌跡データを生成し、後に統合するということが考えられる。しかし、この場合には、分割した小領域間において移動体の位置及び姿勢の不整合(例えば、位置ずれ)が発生し得る。このため、例えば、特許文献2に開示されているような技術を利用した場合には、領域間において移動体の位置及び姿勢の不整合が発生し、走行軌跡データに誤差が発生し得る。
【0008】
本開示は、移動体の走行軌跡データを複数の領域に分割して補正する際に、走行軌跡データに発生する誤差を低減させることができる走行軌跡生成装置、走行軌跡生成方法、及び走行軌跡生成プログラムを提供する。
【課題を解決するための手段】
【0009】
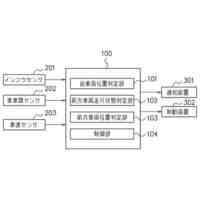
本開示の第1態様は、複数の移動体の各々の走行軌跡データに対して、前記走行軌跡データに沿った箇所に位置する複数の領域であって、かつ隣接する領域と重複領域を有する複数の領域を設定する設定部と、複数の移動体の各々の走行軌跡データに写る周辺物標に基づいて、設定された複数の領域の各々に写る走行軌跡データを補正する補正部と、複数の移動体の各々の走行軌跡データに設定された隣接する領域のペアの各々について、ペアのうちの第1の領域内の前記重複領域に写る走行軌跡データ内の移動体と、ペアのうちの第2の領域内の前記重複領域に写る走行軌跡データ内の移動体とが一致するように、ペアのうちの少なくとも一方の領域の位置又は傾きを補正して、複数の移動体の各々の走行軌跡データを補正することにより、複数の移動体の各々の走行軌跡データを生成する生成部と、を備えた走行軌跡生成装置である。
【0010】
第2態様は、第1態様の走行軌跡生成装置において、前記生成部は、前記領域のペアの各々について、前記ペアのうちの第1の領域内の前記重複領域に写る走行軌跡データ内の移動体と、前記ペアのうちの第2の領域内の前記重複領域に写る走行軌跡データ内の移動体とが一致するように、前記ペアのうちの少なくとも一方の領域の位置又は傾きを補正した後に、第1の領域内の前記重複領域に写る移動体の位置と第2の領域内の前記重複領域に写る移動体の位置との間の残差を計算し、前記残差が小さいほど大きくなるような値を、移動体の位置情報の信頼度を表す移動体位置信頼度として算出し、複数の移動体の各々の走行軌跡データのうち、前記移動体位置信頼度が所定閾値以下である走行軌跡データを除外する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社豊田中央研究所
燃料電池システム
14日前
株式会社豊田中央研究所
分散電源システム
今日
株式会社豊田中央研究所
ガスセンサ及びその製造方法
8日前
株式会社豊田中央研究所
吸着器の製造方法および吸着器
5日前
株式会社豊田中央研究所
水電解システムおよび水電解装置の制御方法
5日前
株式会社豊田中央研究所
情報処理システム、情報処理方法及びプログラム
16日前
株式会社豊田中央研究所
水電解システム、水供給システム、および水供給方法
5日前
株式会社豊田中央研究所
情報処理システム、情報処理方法、及び情報処理プログラム
今日
株式会社豊田中央研究所
非水系二次電池の不活性化剤及び非水系二次電池の不活性化方法
8日前
株式会社豊田中央研究所
水電解システム、水電解方法、および、コンピュータプログラム
8日前
株式会社豊田中央研究所
走行軌跡生成装置、走行軌跡生成方法、及び走行軌跡生成プログラム
8日前
株式会社豊田中央研究所
電池評価装置、電池保護システム、電池評価方法および電池製造方法
14日前
株式会社豊田中央研究所
製造ライン設計装置、製造ライン設計システム、製造ライン設計方法、およびコンピュータプログラム
15日前
個人
安全支援装置
7日前
日本精機株式会社
警報システム
2か月前
株式会社SUBARU
車両
1か月前
個人
自動電動車椅子
1か月前
スズキ株式会社
運転支援装置
2か月前
エムケー精工株式会社
車両誘導装置
2か月前
個人
磁気路上での車両の路線離脱防御
1か月前
株式会社国際電気
防災システム
2か月前
ニッタン株式会社
発信機
3か月前
ニッタン株式会社
発信機
3か月前
ニッタン株式会社
検知器
1か月前
日本無線株式会社
船舶システム
8日前
ニッタン株式会社
検知器
2か月前
ニッタン株式会社
検知器
2か月前
ニッタン株式会社
検知器
2か月前
トヨタ自動車株式会社
車両
3か月前
株式会社SUBARU
運転支援装置
1か月前
ダイハツ工業株式会社
移動支援装置
26日前
個人
乗り物の移動を支援する方法及び装置
3か月前
日本信号株式会社
異常走行検出装置
1か月前
トヨタ自動車株式会社
サーバ
16日前
株式会社小糸製作所
移動体検出装置
2か月前
トヨタ自動車株式会社
サーバ
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ