TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025165065
公報種別
公開特許公報(A)
公開日
2025-11-04
出願番号
2024068921
出願日
2024-04-22
発明の名称
管理システム、及び管理方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/644 20240101AFI20251027BHJP(制御;調整)
要約
【課題】自律移動ロボットを付属ユニットとともに用いる場合、付属ユニットに応じた適切な制御を行うことができる管理システム、及び管理方法を提供する。
【解決手段】本実施形態にかかる管理システムは、自律移動ロボットと、移動ロボットに組み合わせて用いられることで異なる複数のサービスを移動ロボットが実行することを可能とする複数の付属ユニット30とを管理する管理システムであって、移動ロボットに組み合わせて用いられる付属ユニットに関するユニット情報を取得し、ユニット情報に基づいて、付属ユニット毎に設定された複数の制御パラメータを取得し、複数の制御パラメータに応じて、移動ロボットの動作を制御する。管理システムは、ディープラーニングなどの機械学習モデルを用いてもよい。
【選択図】図2
特許請求の範囲
【請求項1】
自律移動ロボットと、
前記自律移動ロボットに組み合わせて用いられることで異なる複数のサービスを前記自律移動ロボットが実行することを可能とする複数の付属ユニットとを管理する管理システムであって、
前記自律移動ロボットに組み合わせて用いられる前記付属ユニットに関するユニット情報を取得し、
前記ユニット情報に基づいて、前記付属ユニット毎に設定された複数の制御パラメータを取得し、
前記複数の制御パラメータに応じて、前記自律移動ロボットの動作を制御する、
管理システム。
続きを表示(約 500 文字)
【請求項2】
インタフェースを介して選択された付属ユニットの識別情報を取得して、識別情報に基づいて複数の制御パラメータを取得する請求項1に記載の管理システム。
【請求項3】
自律移動ロボットに組み合わせられている付属ユニットを検出して、検出された付属ユニットのユニット情報に基づいて、複数の制御パラメータを取得する請求項1に記載の管理システム。
【請求項4】
ユーザが前記制御パラメータを調整可能である請求項1に記載の管理システム。
【請求項5】
自律移動ロボットと、
前記自律移動ロボットに組み合わせて用いられることで異なる複数のサービスを前記自律移動ロボットが実行することを可能とする複数の付属ユニットとを管理する管理方法であって、
前記自律移動ロボットに組み合わせて用いられる前記付属ユニットに関するユニット情報を取得し、
前記ユニット情報に基づいて、前記付属ユニット毎に設定された複数の制御パラメータを取得し、
前記複数の制御パラメータに応じて、前記自律移動ロボットの動作を制御する、
管理方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、管理システム、及び管理方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、車輪付きカートを牽引する自律移動ロボットが開示されている。自律移動ロボットは、車輪付きカートを牽引する牽引アームを有している。牽引アームが車輪付きカートの下側に入った状態で、自律移動ロボットが車輪付きカートを牽引する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2023/086665号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、自律移動ロボットが、車輪付きカートを搬送するという搬送サービスを実行することができる。ところで、このような移動ロボットでは、搬送サービス以外のサービスを実行したいという要望がある。
【課題を解決するための手段】
【0005】
本実施形態にかかる管理システムは、自律移動ロボットと、前記自律移動ロボットに組み合わせて用いられることで異なる複数のサービスを前記自律移動ロボットが実行することを可能とする複数の付属ユニットとを管理する管理システムであって、前記自律移動ロボットに組み合わせて用いられる前記付属ユニットに関するユニット情報を取得し、前記ユニット情報に基づいて、前記付属ユニット毎に設定された複数の制御パラメータを取得し、前記複数の制御パラメータに応じて、前記自律移動ロボットの動作を制御する。
【0006】
本実施形態にかかる管理方法は、自律移動ロボットと、前記自律移動ロボットに組み合わせて用いられることで異なる複数のサービスを前記自律移動ロボットが実行することを可能とする複数の付属ユニットとを管理する管理方法であって、前記自律移動ロボットに組み合わせて用いられる前記付属ユニットに関するユニット情報を取得し、前記ユニット情報に基づいて、前記付属ユニット毎に設定された複数の制御パラメータを取得し、前記複数の制御パラメータに応じて、前記自律移動ロボットの動作を制御する。
【発明の効果】
【0007】
本開示によれば、自律移動ロボットを付属ユニットとともに用いる場合、付属ユニットに応じた適切な制御を行うことができる管理システム、及び管理方法を提供することができる。
【図面の簡単な説明】
【0008】
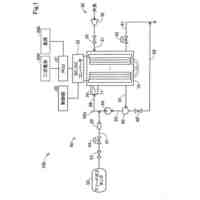
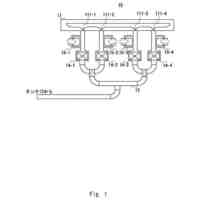
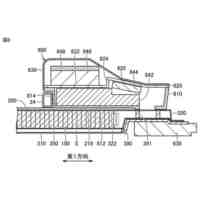
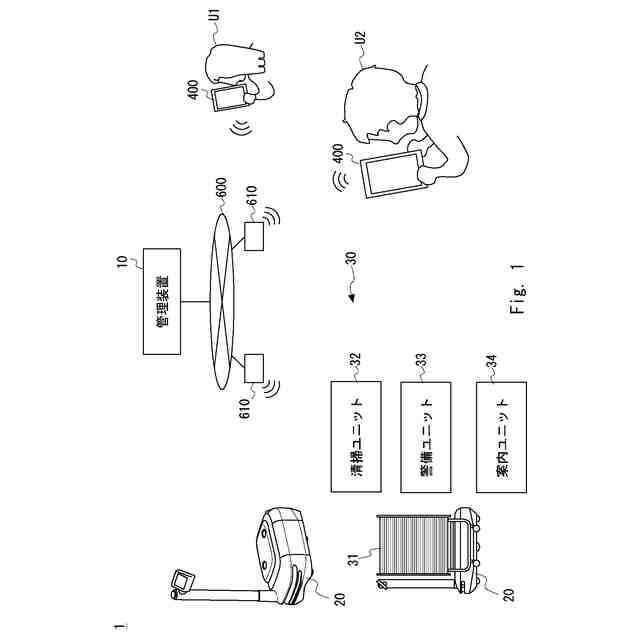
本実施形態に係る管理システムの全体構成を示す模式図である。
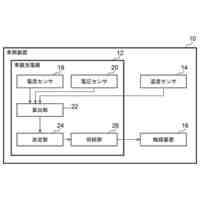
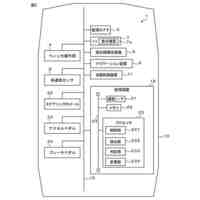
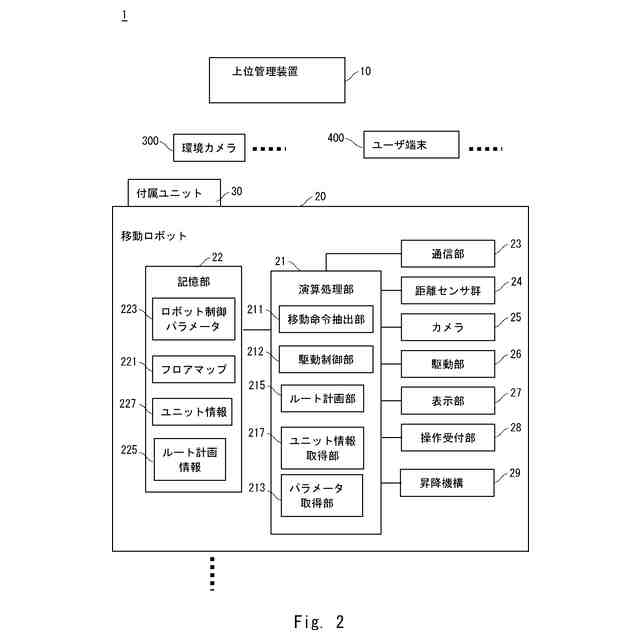
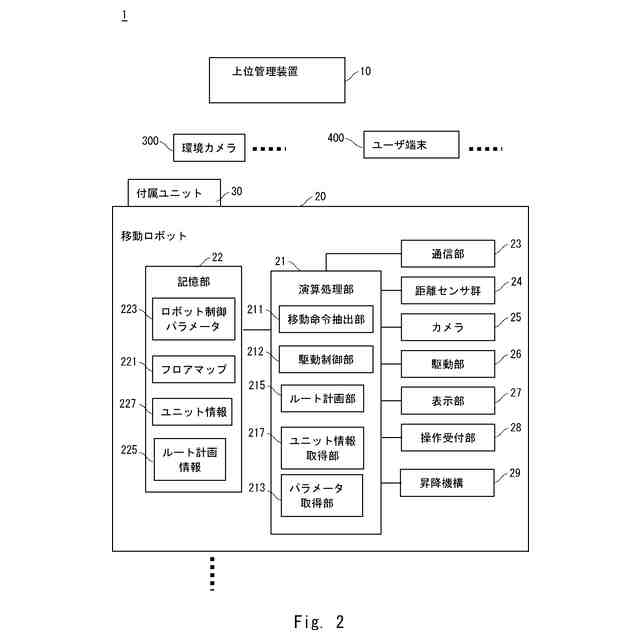
管理システムの制御系を示すブロック図である。
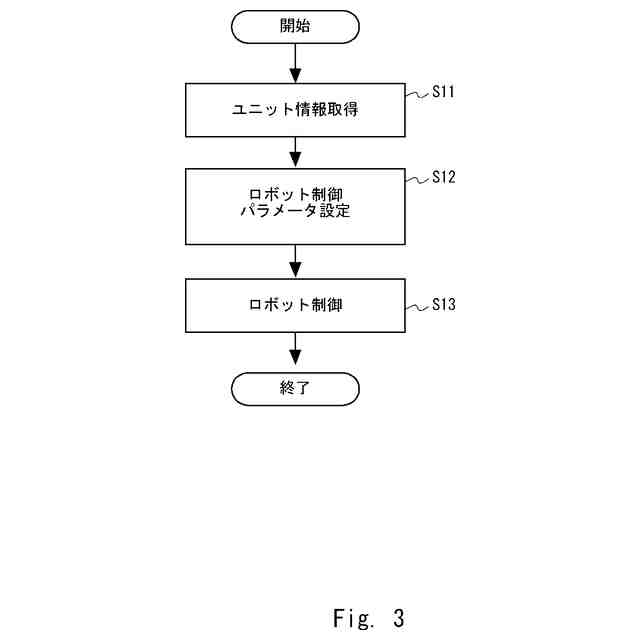
管理方法を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、発明の実施の形態を通じて本発明を説明するが、特許請求の範囲に係る発明は以下の実施形態に限定するものではない。また、実施形態で説明する構成の全てが課題を解決するための手段として必須であるとは限らない。
【0010】
(全体構成)
本実施の形態にかかる管理システムは複数のサービス(タスクともいう)を実行可能な自律移動ロボットを管理するためのシステムである。図1は、管理システム1の構成を示す模式図である。管理システム1は、移動ロボット20と、上位管理装置10と、付属ユニット30と、ネットワーク600と、通信ユニット610と、ユーザ端末400と、を備えている管理システム1は、1又は複数の移動ロボット20と、その付属ユニット30を管理するためのシステムである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電池
17日前
トヨタ自動車株式会社
方法
2日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
電池
23日前
トヨタ自動車株式会社
配管
18日前
トヨタ自動車株式会社
タンク
2日前
トヨタ自動車株式会社
電動車
17日前
トヨタ自動車株式会社
電動車
18日前
トヨタ自動車株式会社
ロータ
18日前
トヨタ自動車株式会社
塗工装置
9日前
トヨタ自動車株式会社
車両装置
9日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
製造設備
23日前
トヨタ自動車株式会社
監視装置
23日前
トヨタ自動車株式会社
エンジン
9日前
トヨタ自動車株式会社
蓄電セル
25日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
10日前
トヨタ自動車株式会社
蓄電装置
9日前
トヨタ自動車株式会社
蓄電装置
17日前
トヨタ自動車株式会社
制御装置
18日前
トヨタ自動車株式会社
制御装置
18日前
トヨタ自動車株式会社
学習装置
17日前
トヨタ自動車株式会社
コネクタ
17日前
トヨタ自動車株式会社
制御装置
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ