TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025163746
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024067235
出願日
2024-04-18
発明の名称
学習装置、分類装置、学習方法、分類方法及びプログラム
出願人
NTT株式会社
代理人
弁理士法人志賀国際特許事務所
主分類
G06N
20/00 20190101AFI20251023BHJP(計算;計数)
要約
【課題】訓練ドメインと異なる目標ドメインで取得されたデータに対する分類を行う他の技術を提供すること。
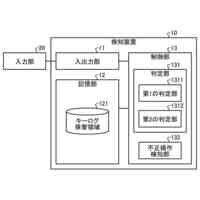
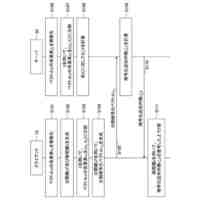
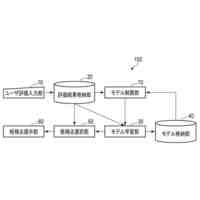
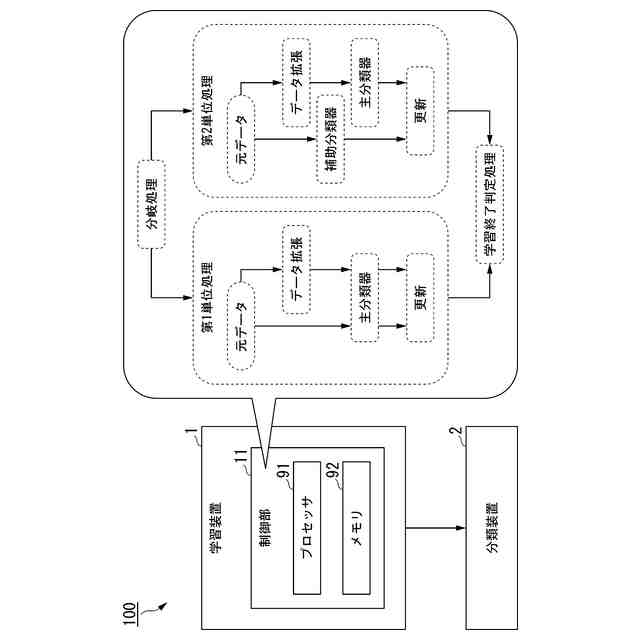
【解決手段】学習対象モデルの学習を行う制御部を備え、学習対象モデルは、目標ドメインの教師無しデータである元データの集合であるデータ集合に属する各元データに対してデータ拡張を行うデータ拡張処理と、処理対象のデータの特徴ベクトルと帰属先の候補として定められたクラスについてデータの帰属先である確率を示す分布とを得る主分類器と、拡張済みデータの特徴ベクトルと前記クラスについて拡張済みデータの帰属先である確率を示す分布とを得る補助分類器と、を含み、学習では、処理対象を元データとする主分類器の結果と処理対象を拡張済みデータとする主分類器の結果とに基づき主分類器及び補助分類器が更新され、処理対象を拡張済みデータとする主分類器の結果と補助分類器の結果とに基づきデータ拡張処理が更新される学習装置。
【選択図】図1
特許請求の範囲
【請求項1】
学習対象の数理モデルである学習対象モデルの学習を行う制御部、
を備え、
前記学習対象モデルは、目標ドメインの教師無しデータである元データ、の集合であるデータ集合に属する各元データに対して確率的に決定されたデータ拡張を行う処理であるデータ拡張処理と、処理対象のデータの特徴ベクトルと予め帰属先の候補として定められたクラスそれぞれについて前記データの帰属先である確率を示す主分類帰属確率分布とを得る主分類器と、前記データ拡張の結果である拡張済みデータの特徴ベクトルと前記クラスそれぞれについて上記拡張済みデータの帰属先である確率を示す補助分類帰属確率分布とを得る補助分類器と、を含み、
前記主分類器のパラメータの値と前記補助分類器のパラメータの値とは異なり、
前記学習では、処理対象を元データとする主分類器の結果と処理対象を拡張済みデータとする前記主分類器の結果とに基づき、前記主分類器及び前記補助分類器が更新され、処理対象を拡張済みデータとする前記主分類器の結果と補助分類器の結果とに基づき前記データ拡張処理の内容が更新される、
学習装置。
続きを表示(約 2,300 文字)
【請求項2】
前記学習では、前記学習対象モデルの実行結果に基づき前記主分類器及び前記補助分類器を更新する第1単位処理の実行により、前記主分類器及び前記補助分類器が更新され、
前記第1単位処理では、実行中の第1単位処理よりも前に実行された第1単位処理における主分類器の結果であって処理対象を元データとする主分類器の結果にも基づき、主分類器及び補助分類器が更新される、
請求項1に記載の学習装置。
【請求項3】
前記学習において前記主分類器及び前記補助分類器は、前記データ集合に属する元データのうちの任意の1つである第1元データと前記第1元データに対するデータ拡張処理の結果とのいずれか一方が入力された前記主分類器の出力である第1確率分布と、実行中の第1単位処理における前記第1元データに対する主分類帰属確率分布、又は、実行中の第1単位処理よりも前に実行された第1単位処理における前記第1元データに対する主分類帰属確率分布である第2確率分布との類似度が高いほど小さくなる値である第1値と、前記データ集合に属する元データのうち第1元データとは異なる任意の1つの元データである第2元データが入力された前記主分類器の出力である第3確率分布と前記第1確率分布との類似度が低いほど小さくなる値に基づいて、更新される、
請求項1に記載の学習装置。
【請求項4】
学習対象の数理モデルである学習対象モデルの学習を行う制御部、を備え、前記学習対象モデルは、目標ドメインの教師無しデータである元データ、の集合であるデータ集合に属する各元データに対して確率的に決定されたデータ拡張を行う処理であるデータ拡張処理と、処理対象のデータの特徴ベクトルと予め帰属先の候補として定められたクラスそれぞれについて前記データの帰属先である確率を示す主分類帰属確率分布とを得る主分類器と、前記データ拡張の結果である拡張済みデータの特徴ベクトルと前記クラスそれぞれについて上記拡張済みデータの帰属先である確率を示す補助分類帰属確率分布とを得る補助分類器と、を含み、前記主分類器のパラメータの値と前記補助分類器のパラメータの値とは異なり、前記学習では、処理対象を元データとする主分類器の結果と処理対象を拡張済みデータとする前記主分類器の結果とに基づき前記主分類器及び前記補助分類器が更新され、処理対象を拡張済みデータとする前記主分類器の結果と補助分類器の結果とに基づき前記データ拡張処理の内容が更新される、学習装置の得た学習済みの前記主分類器を用いた分類を行う分類部、
を備える分類装置。
【請求項5】
学習対象の数理モデルである学習対象モデルの学習を行う制御部、を備え、前記学習対象モデルは、目標ドメインの教師無しデータである元データ、の集合であるデータ集合に属する各元データに対して確率的に決定されたデータ拡張を行う処理であるデータ拡張処理と、処理対象のデータの特徴ベクトルと予め帰属先の候補として定められたクラスそれぞれについて前記データの帰属先である確率を示す主分類帰属確率分布とを得る主分類器と、前記データ拡張の結果である拡張済みデータの特徴ベクトルと前記クラスそれぞれについて上記拡張済みデータの帰属先である確率を示す補助分類帰属確率分布とを得る補助分類器と、を含み、前記主分類器のパラメータの値と前記補助分類器のパラメータの値とは異なり、前記学習では、処理対象を元データとする主分類器の結果と処理対象を拡張済みデータとする前記主分類器の結果とに基づき前記主分類器及び前記補助分類器が更新され、処理対象を拡張済みデータとする前記主分類器の結果と補助分類器の結果とに基づき前記データ拡張処理の内容が更新される、学習装置の実行する学習方法であって、
前記学習を行う制御ステップ、
を有する学習方法。
【請求項6】
学習対象の数理モデルである学習対象モデルの学習を行う制御部、を備え、前記学習対象モデルは、目標ドメインの教師無しデータである元データ、の集合であるデータ集合に属する各元データに対して確率的に決定されたデータ拡張を行う処理であるデータ拡張処理と、処理対象のデータの特徴ベクトルと予め帰属先の候補として定められたクラスそれぞれについて前記データの帰属先である確率を示す主分類帰属確率分布とを得る主分類器と、前記データ拡張の結果である拡張済みデータの特徴ベクトルと前記クラスそれぞれについて上記拡張済みデータの帰属先である確率を示す補助分類帰属確率分布とを得る補助分類器と、を含み、前記主分類器のパラメータの値と前記補助分類器のパラメータの値とは異なり、前記学習では、処理対象を元データとする主分類器の結果と処理対象を拡張済みデータとする前記主分類器の結果とに基づき前記主分類器及び前記補助分類器が更新され、処理対象を拡張済みデータとする前記主分類器の結果と補助分類器の結果とに基づき前記データ拡張処理の内容が更新される、学習装置の得た学習済みの前記主分類器を用いた分類を行う分類部、を備える分類装置の実行する分類方法であって、
前記分類を行う分類ステップ、
を有する分類方法。
【請求項7】
請求項1~3のいずれか一項に記載の学習装置としてコンピュータを機能させるためのプログラム。
【請求項8】
請求項4に記載の分類装置としてコンピュータを機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、学習装置、分類装置、学習方法、分類方法及びプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
機械学習を用いた分類器の訓練には、一般的に教師あり学習と呼ばれる枠組みが用いられる。教師あり学習とは、あるデータとそのデータに対する正解ラベルとのペアを大量に用意し、データを入力したときにその正解ラベルを予測することができる分類器を訓練する技術である。また、このような大量のデータと正解ラベルのペアを教師あり訓練データと呼ぶ。
【0003】
教師あり学習で訓練された分類器は、教師あり訓練データが取得される環境又は領域(以下「訓練ドメイン」という。)では、高い分類精度を達成できる。一方で、新たに分類器を適用したいデータが取得される環境又は領域(以下「目標ドメイン」という。)について、訓練ドメインと目標ドメインが異なる場合、目標ドメインに対して分類器は、分類精度を大きく低下してしまう。
【0004】
この説明からわかるように、目標ドメインとは、訓練データを用いて学習された数理モデルに入力されるデータの取得された環境又は領域であって訓練データの取得された環境又は領域とは異なる環境又は領域、である。一方、訓練ドメインとは数理モデルの学習に用いられるデータである訓練データの取得された環境又は領域である。
【0005】
例えば,コンピュータグラフィックスを用いて作成した物体の分類のための教師あり訓練データセットを用いて訓練された分類器は、実世界で撮影された写真に写る物体を分類する場合に、コンピュータグラフィックスと写真との見えの違いによって、分類精度を低下させてしまう。このようにドメイン間に差異が存在する場合における学習問題はドメイン適応問題と呼ばれる。通常、目標ドメインにおいても教師あり訓練データを構築することは、データ収集や正解ラベルの付与などにかかるコストの観点から制約が存在することも多く、目標ドメインにおいて教師あり学習を実施することによる解決は難しい。
【0006】
そこでこのようなドメイン適応問題を解決するために、例えば下記の特許文献1や非特許文献1~3に開示された技術が存在する。
【0007】
特許文献1に開示された技術では訓練ドメインのサンプルの生成分布と目標ドメインのサンプルの生成分布との分布間距離を表すMaximum Mean Discrepancy (MMD)の値に基づき、その値を最小化するような、訓練ドメインから目標ドメインへの変換則が学習される。特許文献1の技術では、上記変換則に従って変換された訓練ドメインのサンプルを用いて、分類器を学習することによって、ドメイン適応問題の解決が図られている。
【0008】
例えば、非特許文献1に開示された技術では、訓練ドメインと目標ドメインのサンプルを分類するドメイン分類器を同時に学習することが行われる。非特許文献1に開示された技術では、ドメイン分類器が二つのドメインを正しく分類できなくなるような特徴量を学習することにより、ドメインに依存せず分類に有用な特徴量を獲得することで、ドメイン適応問題の解決が図られている。
【0009】
例えば、特許文献1や非特許文献1に開示の技術やそれに類する技術は、分類器を目標ドメインに対して訓練する際に、訓練ドメインの教師ありデータと目標ドメインの教師なしデータとの二つのドメインのデータを必要とする。しかしながら、教師あり訓練データに関するプライバシーの問題が存在しうることや、目標ドメインが異なるごとに教師あり訓練データを用いて分類器を都度学習することが非効率であるといった問題を抱えている。これらの観点から、教師あり訓練データを用いずに分類器を訓練できることが求められる場合がある。
【先行技術文献】
【特許文献】
【0010】
特開2019-101789号公報
【非特許文献】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
NTT株式会社
計算装置
1か月前
NTT株式会社
検知装置
9日前
NTT株式会社
計算装置
24日前
NTT株式会社
光デバイス
2か月前
NTT株式会社
圧力センサ
2か月前
NTT株式会社
通信システム
15日前
NTT株式会社
遠隔制御システム
1日前
NTT株式会社
遠隔制御システム
1日前
NTT株式会社
復号装置及び復号方法
1か月前
NTT株式会社
推定装置及び推定方法
2か月前
NTT株式会社
解析装置および解析方法
2か月前
NTT株式会社
情報処理装置、及び情報処理方法
1か月前
NTT株式会社
情報処理装置、及び情報処理方法
1か月前
NTT株式会社
交通量推定装置及び交通量推定方法
2か月前
NTT株式会社
無線通信システム及び無線通信方法
23日前
NTT株式会社
通信システム、方法及びプログラム
1か月前
NTT株式会社
通信システム、方法及びプログラム
1か月前
NTT株式会社
窒素固定能を有する藻類の選抜方法
25日前
NTT株式会社
映像処理装置、方法及びプログラム
2か月前
NTT株式会社
秘匿計算システム及び秘匿計算方法
2か月前
NTT株式会社
刺激制御装置、および刺激制御方法
23日前
NTT株式会社
秘匿計算システム及び秘匿計算方法
2か月前
NTT株式会社
映像処理装置、方法及びプログラム
1日前
NTT株式会社
評価装置、評価方法およびプログラム
1か月前
NTT株式会社
光ファイバの群遅延時間測定システム
2か月前
NTT株式会社
情報処理装置、方法およびプログラム
2か月前
NTT株式会社
データ解析装置、方法およびプログラム
2か月前
NTT株式会社
量子鍵配送システム及び量子鍵配送方法
1か月前
NTT株式会社
電子署名システム、方法及びプログラム
1か月前
NTT株式会社
座屈剥離構造の予測装置および予測方法
1か月前
NTT株式会社
微生物の土壌中での生存性を調節する方法
1か月前
NTT株式会社
情報処理装置およびボットネット分析方法
1か月前
NTT株式会社
測定装置、測定方法、及び、測定プログラム
1か月前
NTT株式会社
推論装置、学習装置、推論方法、及びプログラム
2か月前
NTT株式会社
数モードマルチコア光ファイバ及び光伝送システム
1か月前
NTT株式会社
推定装置、復元装置、推定方法、およびプログラム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ