TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025161078
公報種別
公開特許公報(A)
公開日
2025-10-24
出願番号
2024063976
出願日
2024-04-11
発明の名称
半導体処理装置
出願人
株式会社日立ハイテク
代理人
弁理士法人平木国際特許事務所
主分類
H01L
21/68 20060101AFI20251017BHJP(基本的電気素子)
要約
【課題】半導体処理装置が処理する試料を搬送する搬送ロボットに起因して発生する搬送誤差を補正し、高精度な試料搬送を実現する。
【解決手段】本開示に係る半導体処理装置は、搬送機構が試料を試料ステージ上に載置する前に、センサが計測した前記搬送機構の角度または位置を用いて、前記試料の理想位置からの位置ずれ量を計算し、前記位置ずれ量だけ前記試料ステージを動作させる。
【選択図】図1
特許請求の範囲
【請求項1】
半導体の試料を処理する半導体処理装置であって、
前記試料を載置する試料ステージ、
前記試料ステージとの間で前記試料を受け渡しする搬送機構、
前記搬送機構の角度または前記搬送機構の位置を検出するセンサ、
前記搬送機構を制御する計算機、
を備え、
前記計算機は、前記搬送機構が前記試料を前記試料ステージ上に載置する前に、前記センサが計測した前記角度または前記位置を用いて、前記試料の理想位置からの位置ずれ量を計算し、
前記計算機は、前記位置ずれ量だけ前記試料ステージを動作させることにより、前記搬送機構が前記試料ステージ上に前記試料を載置する際の位置決め誤差を低減する
ことを特徴とする半導体処理装置。
続きを表示(約 1,600 文字)
【請求項2】
前記搬送機構は、回転軸を中心に回転するアームを備え、
前記センサは、前記アームの前記回転軸を中心とする回転角を前記角度として計測し、
前記計算機は、前記角度と前記アームの長さと前記試料の位置との間の関係式にしたがって、前記位置ずれ量を計算する
ことを特徴とする請求項1記載の半導体処理装置。
【請求項3】
前記搬送機構は、平面内を移動することができるアームおよび前記試料を乗せるハンドを備え、
前記センサは、前記アームの平面位置または前記ハンドの平面位置を前記位置として計測し、
前記計算機は、前記位置と前記試料の位置との間の関係式にしたがって、前記位置ずれ量を計算する
ことを特徴とする請求項1記載の半導体処理装置。
【請求項4】
前記半導体処理装置は、前記試料ステージを収容している試料室に対して前記試料を搬送する前において前記試料が静止しているときの前記試料の偏心量を計測するプリアライナを備え、
前記計算機は、前記角度または前記位置を用いて、前記搬送機構が前記試料を受け取るときに発生した前記試料の位置ずれを、受け取り時ずれとして計算し、
前記計算機は、前記プリアライナが計測した前記偏心量と、前記受け取り時ずれとを加算することにより、前記位置ずれ量を計算する
ことを特徴とする請求項1記載の半導体処理装置。
【請求項5】
前記半導体処理装置は、前記試料ステージを収容している試料室に対して前記試料を搬送する前において前記試料が静止しているときの前記試料の偏心量を計測するプリアライナを備え、
前記計算機は、前記角度または前記位置を用いて、前記搬送機構が前記試料を前記試料ステージ上に載置するときに発生した前記試料の位置ずれを、引き渡し時ずれとして計算し、
前記計算機は、前記プリアライナが計測した前記偏心量と、前記引き渡し時ずれとを加算することにより、前記位置ずれ量を計算する
ことを特徴とする請求項1記載の半導体処理装置。
【請求項6】
前記計算機は、前記試料の理想位置からのずれを実際に計測した結果を、実測ずれ量として取得し、
前記計算機は、前記角度または前記位置を用いて計算した前記位置ずれ量と、前記実測ずれ量との間の差分が閾値以上である場合は、その旨のアラートを発信する
ことを特徴とする請求項1記載の半導体処理装置。
【請求項7】
前記計算機は、前記試料の理想位置からのずれを実際に計測した結果を、実測ずれ量として取得し、
前記計算機は、前記実測ずれ量が閾値以上である場合は、前記搬送機構が前記試料を搬送する速度を、前記実測ずれ量が前記閾値未満である場合よりも遅くする
ことを特徴とする請求項1記載の半導体処理装置。
【請求項8】
前記搬送機構は、前記試料を前記試料ステージ上に載置する前に前記センサが計測した前記角度が閾値以上の振幅で振動している場合は、前記振幅が前記閾値未満に減衰するまで、前記試料を前記試料ステージ上に載置する動作を実施しない
ことを特徴とする請求項1記載の半導体処理装置。
【請求項9】
前記計算機は、前記搬送機構が前記試料を前記試料ステージ上に載置する前に前記センサが計測した前記角度が閾値以上の変化速度で次第にずれていっている場合は、前記変化速度に追従するように前記試料ステージを移動させる
ことを特徴とする請求項1記載の半導体処理装置。
【請求項10】
前記半導体処理装置は、前記試料に対して荷電粒子ビームを照射する荷電粒子ビーム装置として構成されている
ことを特徴とする請求項1記載の半導体処理装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、半導体処理装置における試料搬送方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
荷電粒子線装置などの半導体処理装置においては、半導体ウェハなどの試料を装置内へ搬送するためにウェハ搬送ロボットが用いられる。例えば、装置外の大気圧環境と接続するためのロードロック室(以下、LC)から、真空環境の試料室(以下、SC)内の試料ステージ上にウェハを搬送するために真空搬送ロボットが用いられる。この時、ウェハ搬送ロボットは、繰り返し動作するごとに、試料ステージ上に高精度にウェハを搬送することが求められる。
【0003】
特許文献1は、高精度にウェハを搬送する方法として、LC内でのウェハ偏心量を計測し、計測された偏心量を基に試料ステージの位置を補正することにより、高精度なウェハ搬送を実現する方法が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2012-114117号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示された技術によれば、LC内でウェハ位置がずれてしまっている場合であっても、搬送ロボットの動作を変更することなく高精度なウェハ搬送を実現することが可能になる。一方、同文献の技術においては、予備排気室から試料ステージ上へウェハを搬送するウェハ搬送ロボットの位置決め誤差が発生した場合、その誤差を補正することができず、試料ステージ上への搬送精度が悪化するという課題が生じる。
【0006】
本発明は、上記課題に鑑みてなされたものであり、半導体処理装置が処理する試料を搬送する搬送ロボットに起因して発生する搬送誤差を補正し、高精度な試料搬送を実現することを目的とする。
【課題を解決するための手段】
【0007】
本開示に係る半導体処理装置は、搬送機構が試料を試料ステージ上に載置する前に、センサが計測した前記搬送機構の角度または位置を用いて、前記試料の理想位置からの位置ずれ量を計算し、前記位置ずれ量だけ前記試料ステージを動作させる。
【発明の効果】
【0008】
本開示に係る半導体処理装置によれば、搬送ロボットに起因して発生する搬送誤差を補正し、高精度な試料搬送を実現することが可能である。本開示のその他の課題、構成、効果などについては、以下の実施形態の説明によって明らかとなる。
【図面の簡単な説明】
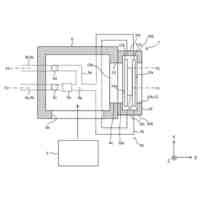
【0009】
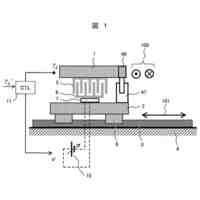
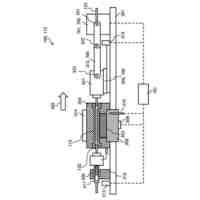
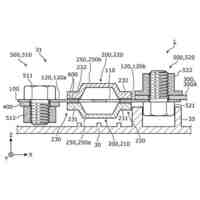
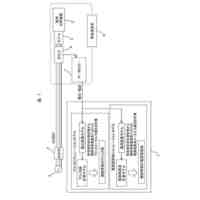
実施形態1に係る半導体処理装置の構成図である。
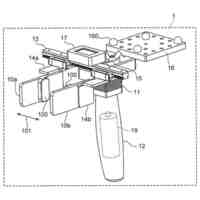
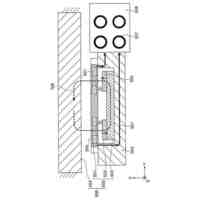
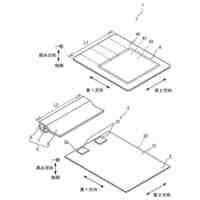
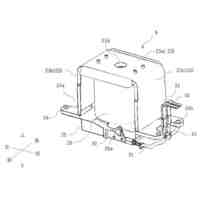
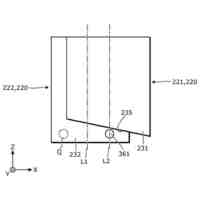
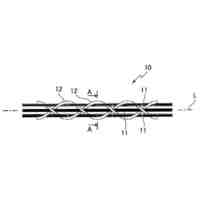
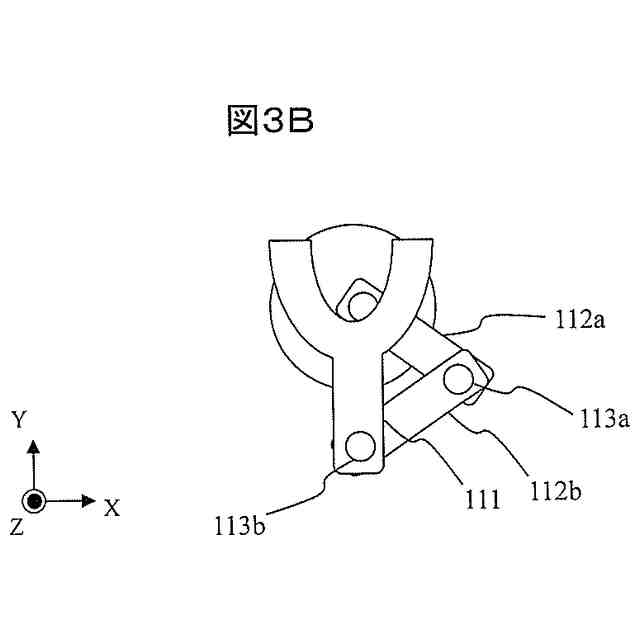
真空内ウェハ搬送ロボット11を横から見た概要図である。
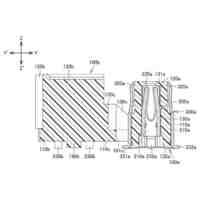
アームを伸ばした状態の真空内ウェハ搬送ロボット11の平面図である。
アームを縮めた状態の真空内ウェハ搬送ロボット11の平面図である。
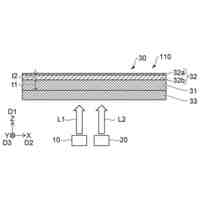
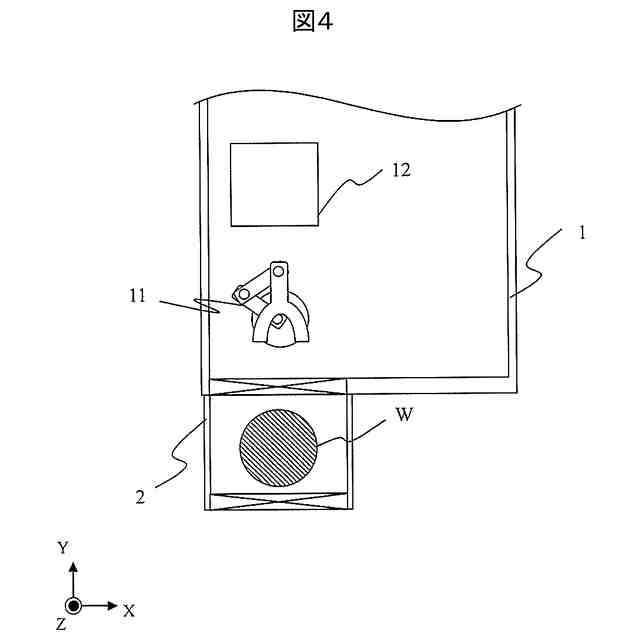
LC2内にウェハWが載置されている状態を示す。
LC2内の真空排気が終了し、真空内ウェハ搬送ロボット11がアームを伸ばしてウェハWを取りに行く様子を示す。
真空内ウェハ搬送ロボット11が図5の状態からウェハWを持ち上げてアームを縮めた後、ロボット全体を回転させて真空内ウェハ搬送ロボット11が試料ステージ12の方向を向いている状態を示す。
図6の状態からアーム伸縮動作用モータ114を回転させてアームを伸ばし、試料ステージ12上にウェハWを搬送した状態を示す。
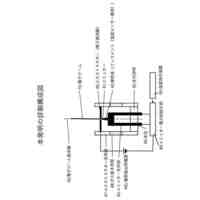
モータ位置決め誤差とウェハずれ量との間の関係について説明する上面図である。
ウェハWを試料ステージ12上に搬送する際のウェハずれ量の補正方法およびウェハ搬送方法について説明するフローチャートである。
【発明を実施するための形態】
【0010】
<実施の形態1>
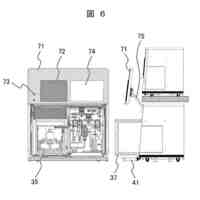
図1は、本開示の実施形態1に係る半導体処理装置の構成図である。図1の半導体処理装置は、試料(以下の例においては半導体ウェハ)に対して荷電粒子線を照射する荷電粒子線装置として構成されている。半導体処理装置は、SC1、LC2、ミニエンバイロンメント(ミニエン)3、および計算機5を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立ハイテク
ガスセンサ
26日前
株式会社日立ハイテク
分散制御システム
4日前
株式会社日立ハイテク
ロボット教示装置
4日前
株式会社日立ハイテク
検体処理システム
1か月前
株式会社日立ハイテク
診断装置および診断方法
1か月前
株式会社日立ハイテク
セキュリティ分析装置および方法
12日前
株式会社日立ハイテク
セキュリティ対策管理装置および方法
18日前
株式会社日立ハイテク
ステージ装置、それを備えた荷電粒子線装置
5日前
株式会社日立ハイテク
ステージ装置、荷電粒子線装置および真空装置
4日前
株式会社日立ハイテク
自動培養装置、それを複数用いた自動培養システム
18日前
株式会社日立ハイテク
分析装置
20日前
株式会社日立ハイテク
フリッカ値算出及び電源高調波解析装置、分析装置、フリッカ値算出及び電源高調波解析方法
1か月前
APB株式会社
蓄電セル
1か月前
東ソー株式会社
絶縁電線
1か月前
日機装株式会社
加圧装置
3日前
マクセル株式会社
電源装置
1か月前
株式会社東芝
端子台
1か月前
ローム株式会社
半導体装置
1か月前
日新イオン機器株式会社
イオン源
3日前
富士電機株式会社
電磁接触器
18日前
株式会社ホロン
冷陰極電子源
1か月前
株式会社GSユアサ
蓄電装置
18日前
株式会社GSユアサ
蓄電装置
1か月前
三菱電機株式会社
回路遮断器
26日前
株式会社GSユアサ
蓄電装置
1か月前
株式会社GSユアサ
蓄電装置
1か月前
トヨタ自動車株式会社
蓄電装置
1か月前
日新イオン機器株式会社
基板処理装置
1か月前
ホシデン株式会社
複合コネクタ
12日前
トヨタ自動車株式会社
バッテリ
1か月前
株式会社東芝
電子源
3日前
株式会社トクミ
ケーブル
4日前
日本特殊陶業株式会社
保持装置
1か月前
個人
電源ボックス及び電子機器
3日前
トヨタ自動車株式会社
冷却構造
1か月前
北道電設株式会社
配電具カバー
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ