TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025156467
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2025128512,2024099819
出願日
2025-07-31,2020-01-01
発明の名称
飛行体
出願人
株式会社エアロネクスト
代理人
主分類
B64U
30/297 20230101AFI20251002BHJP(航空機;飛行;宇宙工学)
要約
【課題】速度性能や燃費を効率的に向上することのできる飛行体を提供すること。
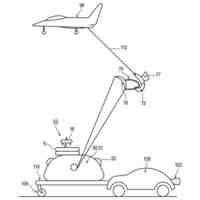
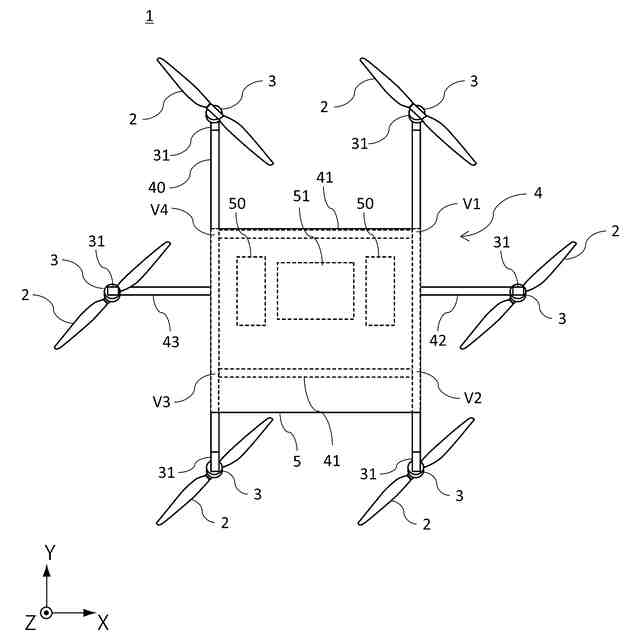
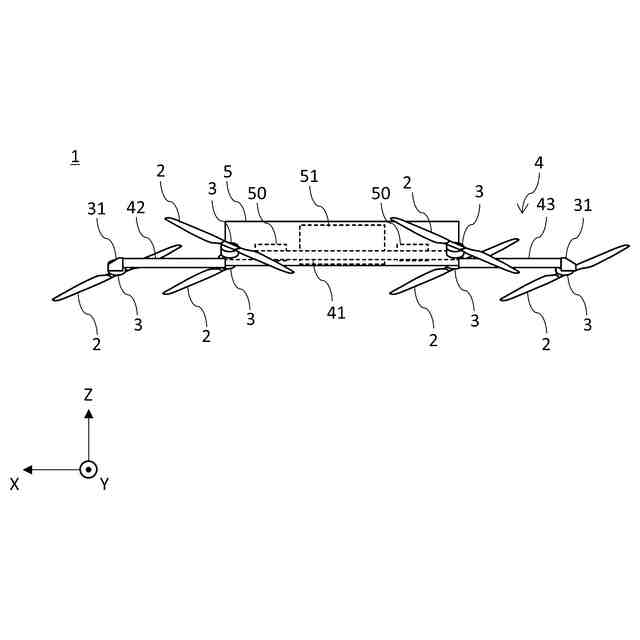
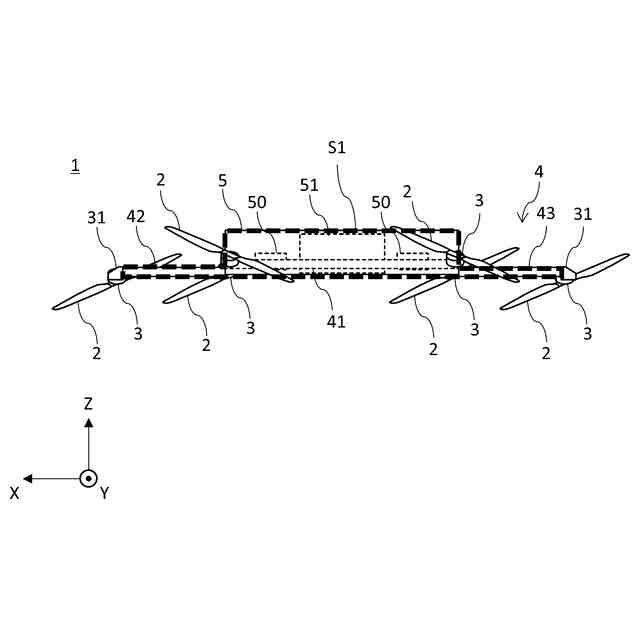
【解決手段】本開示による飛行体1は、前進飛行およびホバリングが可能な飛行体であって、揚力発生部2と、揚力発生部2を保持するフレーム4と、フレーム4に設けられ、且つ搭載対象物51を収納する搭載部5とを備え、前進飛行時におけるフレーム4および搭載部5の前面投影面積が、ホバリング時におけるフレーム4および搭載部5の前面投影面積よりも小さい。
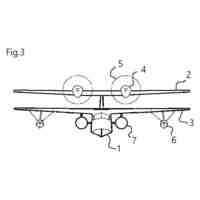
【選択図】図3
特許請求の範囲
【請求項1】
前進飛行およびホバリングが可能な飛行体であって、
揚力発生部と、
前記揚力発生部を保持するフレームと、
前記フレームに設けられ、且つ搭載対象物を収納する搭載部とを備え、
前進飛行時における前記フレームおよび前記搭載部の前面投影面積が、ホバリング時における前記フレームおよび前記搭載部の前面投影面積よりも小さい、
飛行体。
続きを表示(約 620 文字)
【請求項2】
請求項1に記載の飛行体であって、
前記揚力発生部は回転翼を含み、
前記フレームの端部において前記回転翼を支持する支持部をさらに備え、
前記支持部は前記回転翼を回動不能に固定する、飛行体。
【請求項3】
請求項2に記載の飛行体であって、
前記支持部は、前記回転翼の回転軸を、前記飛行体の前進方向でかつ、前記フレームに対して傾斜する方向となるように、前記回転翼を固定する、飛行体。
【請求項4】
請求項1~3のいずれか1項に記載の飛行体であって、
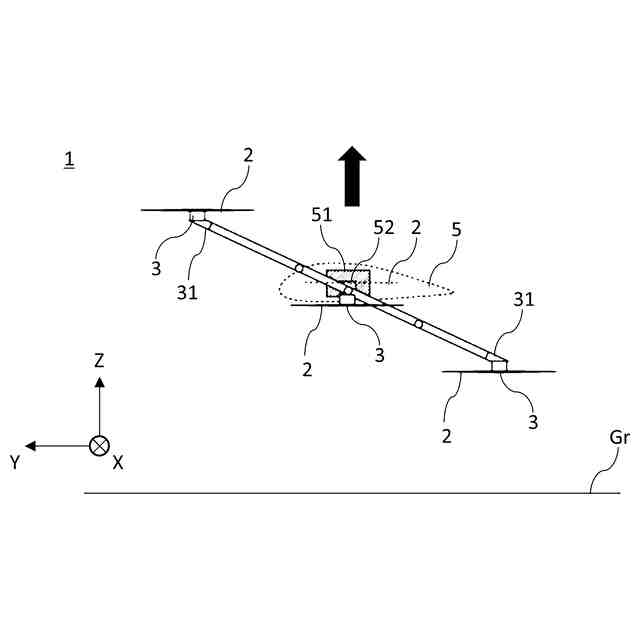
前記飛行体の前記ホバリング時において、前記飛行体は、水平方向に対して後傾した姿勢をとる、飛行体。
【請求項5】
請求項1~4のいずれか1項に記載の飛行体であって、
前記飛行体の前記前進飛行時において、
前記揚力発生部は、前方および上方に対して揚力を発生させ、
前記飛行体は、前記フレームが水平となる姿勢をとる、飛行体。
【請求項6】
請求項1~5のいずれか1項に記載の飛行体であって、
前記搭載部は、前記フレームと、前記フレームに対して少なくとも前後方向に回動可能に接続する接続部を有する、飛行体。
【請求項7】
請求項6に記載の飛行体であって、
前記接続部は、前記搭載部の姿勢を制御する姿勢制御機構を有する、飛行体。
発明の詳細な説明
【技術分野】
【0001】
本開示は、飛行体に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、ドローン(Drone)又は無人航空機(UAV:Unmanned Aerial Vehicle)などの飛行体(以下、「飛行体」と総称する)が普及している。例えば、複数の回転翼を有するマルチコプタタイプが挙げられる(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2013-129301号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の飛行体においては、前進方向への飛行時において、機体を傾斜させることで水平方向の推力を得る。しかしながら機体が傾斜することで移動方向における水平成分の抵抗が大きくなり、速度性能及び燃費の低下を招く要因となっている。
【0005】
そこで、本開示は、速度性能及び燃費を効率的に向上することのできる飛行体を提供することを一つの目的とする。
【課題を解決するための手段】
【0006】
本開示による飛行体は、
前進飛行およびホバリングが可能な飛行体であって、
揚力発生部と、
前記揚力発生部を保持するフレームと、
前記フレームに設けられ、且つ搭載対象物を収納する搭載部とを備え、
前進飛行時における前記フレームおよび前記搭載部の前面投影面積が、ホバリング時における前記フレームおよび前記搭載部の前面投影面積よりも小さい。
【発明の効果】
【0007】
本開示によれば、速度性能及び燃費を効率的に向上することのできる飛行体を提供し得る。
【図面の簡単な説明】
【0008】
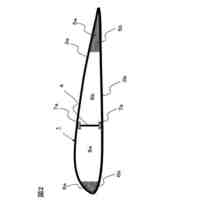
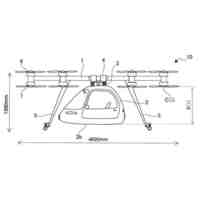
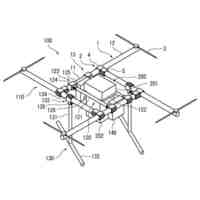
一実施の形態による飛行体の平面視図である。
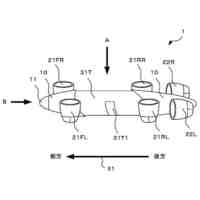
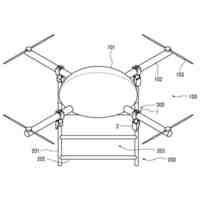
同実施の形態による飛行体の正面視図である。
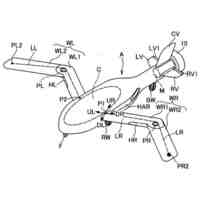
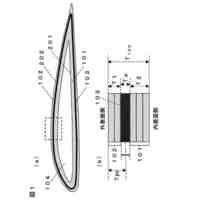
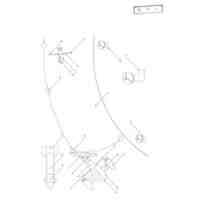
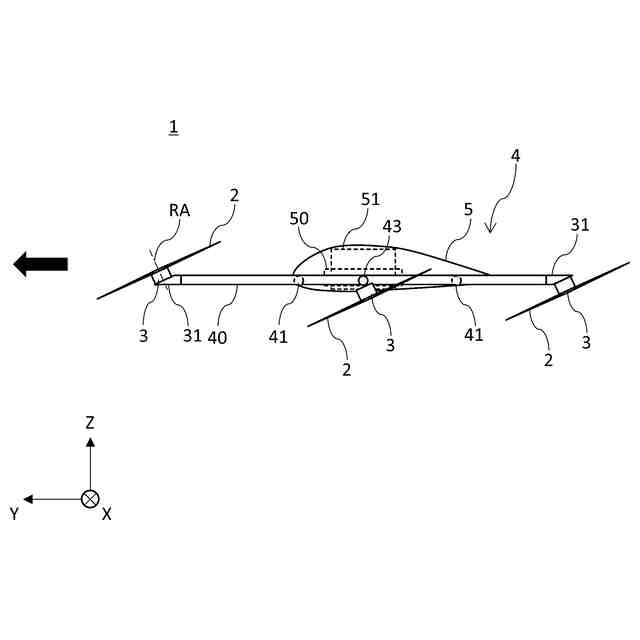
同実施の形態による飛行体の側面視図である。
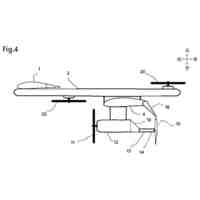
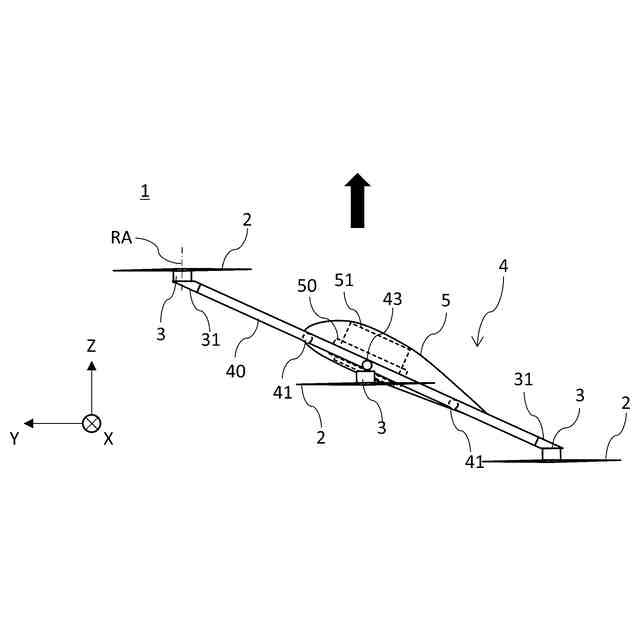
同実施の形態による飛行体の変形例を示す側面視図である。
同実施の形態による飛行体のホバリング状態を示す側面視図である。
前進飛行時における機体の前面の投影領域を示す図である。
ホバリング時における機体の前面の投影領域を示す図である。
飛行体の例示的な機能ブロック図である。
【発明を実施するための形態】
【0009】
本開示の一実施形態の内容を列記して説明する。本開示の一実施の形態による飛行体は、例えば以下のような構成を備える。
[項目1]
前進飛行およびホバリングが可能な飛行体であって、
揚力発生部と、
前記揚力発生部を保持するフレームと、
前記フレームに設けられ、且つ搭載対象物を収納する搭載部とを備え、
前進飛行時における前記フレームおよび前記搭載部の前面投影面積が、ホバリング時における前記フレームおよび前記搭載部の前面投影面積よりも小さい、
飛行体。
[項目2]
項目1に記載の飛行体であって、
前記揚力発生部は回転翼を含み、
前記フレームの端部において前記回転翼を支持する支持部をさらに備え、
前記支持部は前記回転翼を回動不能に固定する、飛行体。
[項目3]
項目2に記載の飛行体であって、
前記支持部は、前記回転翼の回転軸を、前記飛行体の前進方向でかつ、前記フレームに対して傾斜する方向となるように、前記回転翼を固定する、飛行体。
[項目4]
項目1~3のいずれか1項に記載の飛行体であって、
前記飛行体の前記ホバリング時において、前記飛行体は、水平方向に対して後傾した姿勢をとる、飛行体。
[項目5]
項目1~4のいずれか1項に記載の飛行体であって、
前記飛行体の前記前進飛行時において、
前記揚力発生部は、前方および上方に対して揚力を発生させ、
前記飛行体は、前記フレームが水平となる姿勢をとる、飛行体。
[項目6]
項目1~5のいずれか1項に記載の飛行体であって、
前記搭載部は、前記フレームと、前記フレームに対して少なくとも前後方向に回動可能に接続する接続部を有する、飛行体。
[項目7]
項目6に記載の飛行体であって、
前記接続部は、前記搭載部の姿勢を制御する姿勢制御機構を有する、飛行体。
【0010】
<実施の形態の詳細>
以下、本開示の一実施の形態による飛行体について、図面を参照しながら説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
ドローン
8か月前
個人
人工台風
3か月前
個人
着火ドローン
5か月前
個人
救難消防飛行艇
5か月前
個人
AERO JET
24日前
個人
ドローンシステム
9か月前
東レ株式会社
中空回転翼
4か月前
個人
無人空中移動体
1か月前
個人
飛行自動車vol.2
2日前
個人
動力原付きグライダー
1か月前
個人
連続回転可能な飛行機翼
6か月前
個人
導風板付き垂直離着陸機
3か月前
個人
陸海空用の乗り物
6か月前
東レ株式会社
プロペラブレード
4か月前
個人
空飛ぶクルマ
4か月前
東レ株式会社
飛翔体用ブレード
1か月前
東レ株式会社
プロペラブレード
4か月前
東レ株式会社
プロペラブレード
4か月前
個人
垂直離着陸機用エンジン改
9か月前
個人
空中移動システム
11か月前
個人
ドローンを自動離着陸する方法
9か月前
トヨタ自動車株式会社
ドローン
7か月前
個人
エアライナー全自動パラシュート
8か月前
個人
搬送方法および搬送システム
5か月前
個人
ヘリコプター駆動装置
5か月前
株式会社小糸製作所
飛行体ポート
6か月前
株式会社ACSL
システム
8か月前
合同会社アドエア
パラシュート射出装置
8か月前
合同会社アドエア
飛行体の落下補助装置
10か月前
株式会社ACSL
システム
8か月前
個人
飛行体
4か月前
個人
垂直離着陸機用ガスタービンエンジン
9か月前
個人
飛行体
1か月前
株式会社SUBARU
移動体
11か月前
個人
飛行体
4か月前
個人
パラボラ型スペースデブリカタパルト
5か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ