TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025150244
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051030
出願日
2024-03-27
発明の名称
経路設定装置、経路設定方法、プログラムおよび経路設定システム
出願人
沖電気工業株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20251002BHJP(制御;調整)
要約
【課題】多様な自律走行ロボットによる走行経路に沿った自律走行を実現する。
【解決手段】自律移動体の現在位置から目的位置までの設定経路に基づいて、前記設定経路の形を特徴付ける位置を特徴位置として抽出する特徴位置抽出部と、前記設定経路と前記特徴位置とに基づいて、前記特徴位置に対応する第1のアクション順序を決定し、前記特徴位置が第1の経由位置として前記第1のアクション順序に対応付けられた第1のアクション指示を示す情報が、前記自律移動体に送信されるように通信部を制御する通信制御部と、を備える、経路設定装置が提供される。
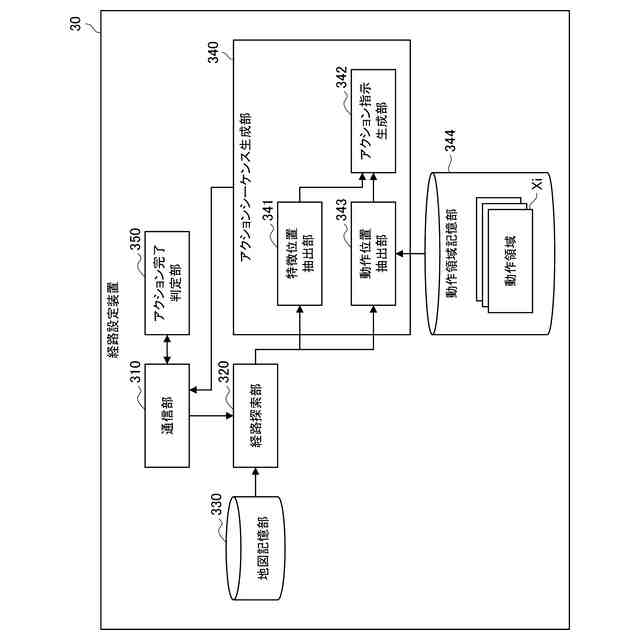
【選択図】図5
特許請求の範囲
【請求項1】
自律移動体の現在位置から目的位置までの設定経路に基づいて、前記設定経路の形を特徴付ける位置を特徴位置として抽出する特徴位置抽出部と、
前記設定経路と前記特徴位置とに基づいて、前記特徴位置に対応する第1のアクション順序を決定し、前記特徴位置が第1の経由位置として前記第1のアクション順序に対応付けられた第1のアクション指示を示す情報が、前記自律移動体に送信されるように通信部を制御する通信制御部と、
を備える、経路設定装置。
続きを表示(約 1,900 文字)
【請求項2】
前記特徴位置抽出部は、前記設定経路に対して形状の単純化処理を施すことにより、前記特徴位置を抽出する、
請求項1に記載の経路設定装置。
【請求項3】
前記経路設定装置は、
前記設定経路と動作領域とに基づいて、前記自律移動体による動作位置を抽出する動作位置抽出部を備え、
前記通信制御部は、前記設定経路と前記動作位置と前記特徴位置とに基づいて、前記第1のアクション順序と、前記動作位置である第2の経由位置に対応する第2のアクション順序とを決定し、前記第2の経由位置と動作アクションとが前記第2のアクション順序に対応付けられた第2のアクション指示を示す情報と、前記第1のアクション指示を示す情報とが、前記自律移動体に送信されるように前記通信部を制御する、
請求項1に記載の経路設定装置。
【請求項4】
前記経路設定装置は、
前記自律移動体の移動方向が閾値以上変化する特徴位置を方向変化位置として抽出する方向変化位置抽出部と、
前記設定経路と前記方向変化位置とに基づいて、方向指示開始アクションに対応する第3の経由位置を抽出する方向指示位置抽出部と、を備え、
前記通信制御部は、前記設定経路と、前記第3の経由位置と、前記特徴位置とに基づいて、前記第1のアクション順序と、前記第3の経由位置に対応する第3のアクション順序とを決定し、前記第3の経由位置と前記方向指示開始アクションとが前記第3のアクション順序に対応付けられた第3のアクション指示を示す情報と、前記第1のアクション指示を示す情報とが、前記自律移動体に送信されるように前記通信部を制御する、
請求項1に記載の経路設定装置。
【請求項5】
前記方向指示位置抽出部は、前記設定経路を構成する複数の位置のうち、前記自律移動体が前記方向変化位置より所定の距離だけ時間的に前に到達する位置に基づいて、前記第3の経由位置を抽出する、
請求項4に記載の経路設定装置。
【請求項6】
前記経路設定装置は、
前記設定経路における所定の距離間隔ごとの複数の位置を抽出する補助位置抽出部を備え、
前記通信制御部は、前記設定経路と、前記複数の位置とに基づいて、前記第1のアクション順序と、前記複数の位置の各々に対応する第4のアクション順序とを決定し、前記複数の位置が複数の経由位置として前記第4のアクション順序に対応付けられた第4のアクション指示を示す情報と、前記第1のアクション指示を示す情報とが、前記自律移動体に送信されるように前記通信部を制御する、
請求項1~5のいずれか一項に記載の経路設定装置。
【請求項7】
自律移動体の現在位置から目的位置までの設定経路に基づいて、前記設定経路の形を特徴付ける位置を特徴位置として抽出することと、
前記設定経路と前記特徴位置とに基づいて、前記特徴位置に対応する第1のアクション順序を決定し、前記特徴位置が第1の経由位置として前記第1のアクション順序に対応付けられた第1のアクション指示を示す情報が、前記自律移動体に送信されるように通信部を制御することと、
を含む、コンピュータにより実行される経路設定方法。
【請求項8】
コンピュータを、
自律移動体の現在位置から目的位置までの設定経路に基づいて、前記設定経路の形を特徴付ける位置を特徴位置として抽出する特徴位置抽出部と、
前記設定経路と前記特徴位置とに基づいて、前記特徴位置に対応する第1のアクション順序を決定し、前記特徴位置が第1の経由位置として前記第1のアクション順序に対応付けられた第1のアクション指示を示す情報が、前記自律移動体に送信されるように通信部を制御する通信制御部と、
として機能させるプログラム。
【請求項9】
自律的に移動する自律移動体と、
前記自律移動体の現在位置から目的位置までの設定経路に基づいて、前記設定経路の形を特徴付ける位置を特徴位置として抽出する特徴位置抽出部と、
前記設定経路と前記特徴位置とに基づいて、前記特徴位置に対応する第1のアクション順序を決定し、前記特徴位置が第1の経由位置として前記第1のアクション順序に対応付けられた第1のアクション指示を示す情報が、前記自律移動体に送信されるように通信部を制御する通信制御部と、
を備える、経路設定システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、経路設定装置、経路設定方法、プログラムおよび経路設定システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、交通施設および商業施設などにおける警備業務または搬送業務の自動化に向けた自律移動体の開発が進められている。自律移動とは、移動体が現在位置から目的位置まで人の手を介さずに自律的に移動する機能であり、自律移動体は、自律的な移動機能を持つ移動体である。このような自律移動体については、例えば特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2010-191502号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、商用化されている自律移動体は、外部システムから設定された経路に沿って自律的に移動することが難しいという問題がある。一般的に商用化されている自律移動体は、特定の業務の自動化に向けて開発されており、想定するユーザとしては、現在その業務を担当している非技術者であることが多い。そのため、自律移動体の操作としても、基本的には移動の目的位置を指定するだけの単純な操作のみ可能となっている。
【0005】
また、経路計画は、各メーカーが保有する独自技術またはノウハウによって調整される機能であり、特別な場合として経路が設定できたとしても、メーカーごとに経路の構成が全く異なり、メーカーごとに異なる経路設定方法が必要となる可能性がある。
【0006】
そこで、本発明は、上記問題に鑑みてなされたものであり、本発明の目的とするところは、経路に沿った自律的な移動が多様な自律移動体によって実現される可能性を高めることが可能な技術を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のある観点によれば、自律移動体の現在位置から目的位置までの設定経路に基づいて、前記設定経路の形を特徴付ける位置を特徴位置として抽出する特徴位置抽出部と、前記設定経路と前記特徴位置とに基づいて、前記特徴位置に対応する第1のアクション順序を決定し、前記特徴位置が第1の経由位置として前記第1のアクション順序に対応付けられた第1のアクション指示を示す情報が、前記自律移動体に送信されるように通信部を制御する通信制御部と、を備える、経路設定装置が提供される。
【0008】
前記特徴位置抽出部は、前記設定経路に対して形状の単純化処理を施すことにより、前記特徴位置を抽出してもよい。
【0009】
前記経路設定装置は、前記設定経路と動作領域とに基づいて、前記自律移動体による動作位置を抽出する動作位置抽出部を備え、前記通信制御部は、前記設定経路と前記動作位置と前記特徴位置とに基づいて、前記第1のアクション順序と、前記動作位置である第2の経由位置に対応する第2のアクション順序とを決定し、前記第2の経由位置と動作アクションとが前記第2のアクション順序に対応付けられた第2のアクション指示を示す情報と、前記第1のアクション指示を示す情報とが、前記自律移動体に送信されるように前記通信部を制御してもよい。
【0010】
前記経路設定装置は、前記自律移動体の移動方向が閾値以上変化する特徴位置を方向変化位置として抽出する方向変化位置抽出部と、前記設定経路と前記方向変化位置と前記特徴位置とに基づいて、方向指示開始アクションに対応する第3の経由位置を抽出する方向指示位置抽出部と、を備え、前記通信制御部は、前記設定経路と、前記第3の経由位置と、前記特徴位置とに基づいて、前記第1のアクション順序と、前記第3の経由位置に対応する第3のアクション順序とを決定し、前記第3の経由位置と前記方向指示開始アクションとが前記第3のアクション順序に対応付けられた第3のアクション指示を示す情報と、前記第1のアクション指示を示す情報とが、前記自律移動体に送信されるように前記通信部を制御してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
沖電気工業株式会社
画像形成装置
1日前
沖電気工業株式会社
画像形成装置
2日前
沖電気工業株式会社
処理装置および処理システム
22日前
沖電気工業株式会社
画像形成装置および媒体種別報知方法
23日前
沖電気工業株式会社
画像形成装置、画像形成媒体及び画像形成方法
1日前
沖電気工業株式会社
情報処理装置、情報処理方法およびプログラム
9日前
沖電気工業株式会社
情報処理システム、情報処理方法およびプログラム
24日前
沖電気工業株式会社
情報処理方法、情報処理プログラム及び情報処理システム
1日前
沖電気工業株式会社
情報処理装置、情報処理プログラム、情報処理方法、及び情報処理システム
22日前
沖電気工業株式会社
画像形成装置、画像形成システム、状態提示方法、及び状態提示プログラム
1か月前
沖電気工業株式会社
情報処理方法、情報処理プログラム、及び情報処理装置
22日前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
2か月前
株式会社熊谷組
障害物の検出方法
1か月前
愛知製鋼株式会社
車両用システム
3か月前
ローム株式会社
基準電圧源
2か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1日前
新電元工業株式会社
作業用ロボット
1か月前
豊田合成株式会社
機器制御装置
1か月前
ローム株式会社
半導体集積回路
2日前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
2か月前
株式会社アサヒエンタープライズ
調整弁
17日前
株式会社ダイフク
物品搬送設備
2か月前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
トヨタ自動車株式会社
制御装置
2か月前
株式会社ダイフク
物品搬送設備
1か月前
カヤバ株式会社
減圧弁
1か月前
トヨタ自動車株式会社
クラッチペダル
3か月前
株式会社ダイフク
物品搬送設備
9日前
キヤノン株式会社
配送システム
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
3か月前
日野自動車株式会社
自動運転装置
1か月前
株式会社TMEIC
安全性診断装置
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ