TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025145449
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024045631
出願日
2024-03-21
発明の名称
距離認識制御システム、電磁波信号発振装置、距離認識制御プログラム
出願人
株式会社豊田中央研究所
,
トヨタ自動車株式会社
,
株式会社デンソー
,
株式会社豊田自動織機
,
株式会社アイシン
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
19/06 20060101AFI20250926BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】GND部としての機能を装置に準備する必要がなく、装置自体を小型化し、作業者の一部のみを電磁場の発信源とする。
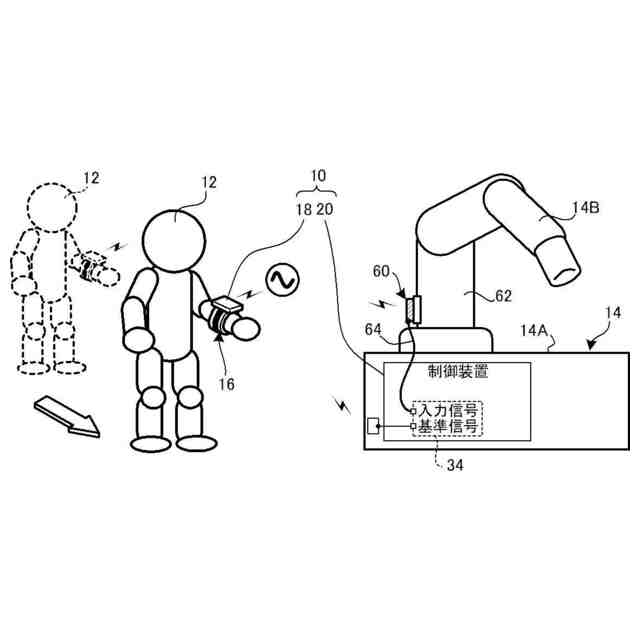
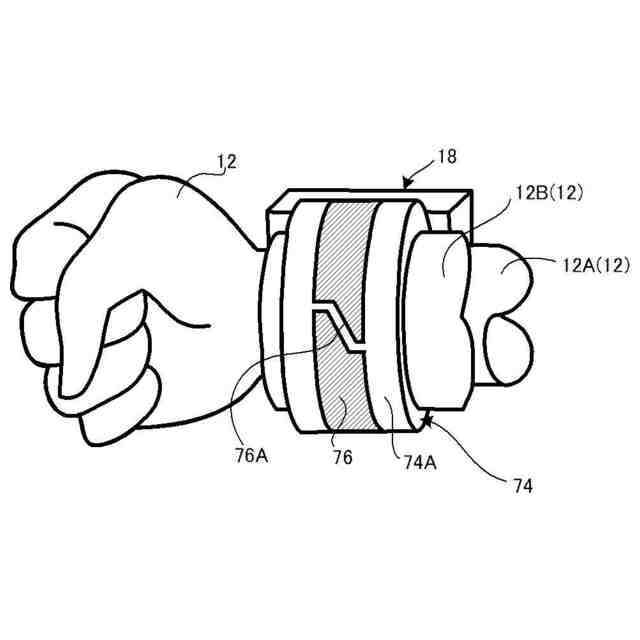
【解決手段】リストバンド16において、作業者12の体表面及び/又は体内をGND線側としたため、発振周波数(波長)に対応する電極の長さを確保することができ、GND線として必要な長さの配線が不要となる。電磁波信号発生部18を、作業者12が装着するリストバンド16に取り付けた。電磁波発振源が、作業者12の手首部12A(バンド部16Aの外周に設けた第2の電極32)に限定されるため、ロボットアーム14に近づくと他の部位よりも危険度が高い部位、或いは、ロボットアーム14に最先に近づく可能性が高い部位に対して、距離認識制御を実行することができる。
【選択図】図2
特許請求の範囲
【請求項1】
互いに接近及び離間し得る第1個体と第2個体との間で、互いの距離を認識するための距離認識制御システムであって、
前記第1個体に設けられ、電磁波信号を発生させて発振する電磁波信号発生部と、
前記第2個体に設けられ、前記電磁波信号発生部から発振する前記電磁波信号を受信し、受信した前記電磁波信号の状態から前記第1個体との距離を演算する制御部とを有し、
前記電磁波信号発生部が一対の電極を備え、前記一対の電極の内、電圧の基準となる一方の電極が、前記第1個体の所定以上の領域を占有する導電性部位に電気的に接続され、
前記一対の電極の内、他方の電極が、前記第1個体の前記導電性部位とは絶縁された特定部位に配置された、距離認識制御システム。
続きを表示(約 960 文字)
【請求項2】
前記第1個体の前記所定以上の領域が人体であり、前記人体に前記一方の電極が当該人体に接続されることで、前記人体が、前記一対の電極に印加する電圧の基準として機能する、請求項1記載の距離認識制御システム。
【請求項3】
前記第1個体の前記所定以上の領域が導電性の移動体であり、前記移動体に前記一方の電極が接続されることで、前記移動体が、前記一対の電極に印加する電圧の基準として機能する、請求項1記載の距離認識制御システム。
【請求項4】
前記他方の電極の電気長が、前記電磁波信号の周波数に基づいて定められ、前記特定部位が、前記制御部で演算する距離の起点となる長さに設定される、請求項1記載の距離認識制御システム。
【請求項5】
前記一方の電極が、前記第1個体の導電性部位に対して、所定の大きさの静電容量で電気的に接続される、請求項1記載の距離認識制御システム。
【請求項6】
前記制御部は、前記電磁波信号を入力し得る複数の入力端子を備え、
前記複数の入力端子まで伝搬してきた、前記電磁波信号が発する電磁界の各々の位相差を得ることで、前記特定部位からの距離を演算する、請求項1記載の距離認識制御システム。
【請求項7】
前記制御部は、前記第1個体との距離が、所定以下となった場合に、前記第2個体の移動を制限するように指示する、請求項1記載の距離認識制御システム。
【請求項8】
一対の電極を備え電磁波信号を発生させて発振する電磁波信号発生部を備え、当該電磁波信号の受信位置との距離を演算する距離認識制御システムに用いられる電磁波信号発振装置であって、
電磁波信号を発振するために電圧が印加される、前記電磁波信号発生部の一対の電極の内、電圧の基準となる一方の電極が、所定以上の領域を占有する導電性部位に電気的に接続され、
前記電磁波信号発生部の一対の電極の内、他方の電極が、前記導電性部位とは絶縁された特定部位に配置された、電磁波信号発振装置。
【請求項9】
コンピュータを、
請求項1~請求項7の何れか1項記載の制御部として動作させる、
距離認識制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、互いに接近及び離間し合う個体間の距離を認識するための距離認識制御システム、電磁波信号発振装置、距離認識制御プログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
マニピュレータ等の可動部を有する産業用ロボットには、可動部が作業者と接触することを回避するための安全装置が設けられている。例えば、特許文献1に記載の対人保護装置においては、作業者の体表面近傍に交流電界が付与されている状態で、ロボットと作業者とが接近することによりロボット側の電極の電圧が高くなると、計測器が計測した電圧値に応じた対人保護のための制御信号が制御器に送られる。制御器は、制御信号に基づいてロボットを減速させたり、停止させたりする。
【0003】
また、特許文献2には、協働ロボットの電界方式を利用した対人保護装置において、床面電極を用いない簡単な構成で、ロボットと作業者との接近を検知できる距離を長くすることが記載されている。
【0004】
より具体的には、特許文献2では、ロボットの周囲で作業する作業者の上衣に装着され、その作業者の体表面近傍に交流電界を付与するウェアラブル装置と、ロボットに設けられる検知電極と、検知電極の電圧を計測する計測器とからなる簡単な構成で、ロボットと作業者とが接近して検知電極の電圧が高くなると、計測器が計測した電圧値に応じた制御信号をロボットの制御器に送り、制御器が受信した制御信号に基づいてロボットに対人保護のための動作を行わせるようにしている。
【先行技術文献】
【特許文献】
【0005】
特開2020-15160号公報
特開2021-109288号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、作業者の一部のみを電磁場の発信源としたい要求があった場合でも、電圧の基準となるGND部の長さを確保する必要がある。例えば、周波数が1MHz~10MHzWお利用する場合、1/4波長は、約75m~7.5mとなる。このため、特許文献2を含む従来技術では、GND部の配線を含め、作業者の一部の領域内に全ての機能をまとめて、電磁場を発生する装置自体を小型化するのは困難である。
【0007】
本発明は上記事実を考慮し、GND部としての機能を装置に準備する必要がなく、装置自体を小型化し、作業者の一部のみを電磁場の発信源とすることができる距離認識制御システム、電磁波信号発振装置、距離認識制御プログラムを得ることが目的である。
【課題を解決するための手段】
【0008】
本発明に係る距離認識制御システムは、互いに接近及び離間し得る第1個体と第2個体との間で、互いの距離を認識するための距離認識制御システムであって、前記第1個体に設けられ、電磁波信号を発生させて発振する電磁波信号発生部と、前記第2個体に設けられ、前記電磁波信号発生部から発振する前記電磁波信号を受信し、受信した前記電磁波信号の状態から前記第1個体との距離を演算する制御部とを有し、前記電磁波信号発生部が一対の電極を備え、前記一対の電極の内、電圧の基準となる一方の電極が、前記第1個体の所定以上の領域を占有する導電性部位に電気的に接続され、前記一対の電極の内、他方の電極が、前記第1個体の前記導電性部位とは絶縁された特定部位に配置された、ことを特徴としている。
【0009】
本発明の距離認識制御システムにおいて、前記第1個体の前記所定以上の領域が人体であり、前記人体に前記一方の電極が当該人体に接続されることで、前記人体が、前記一対の電極に印加する電圧の基準として機能する、ことを特徴としている。
【0010】
本発明の距離認識制御システムにおいて、前記第1個体の前記所定以上の領域が導電性の移動体であり、前記移動体に前記一方の電極が接続されることで、前記移動体が、前記一対の電極に印加する電圧の基準として機能する、ことを特徴としている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る








 特許ウォッチ
特許ウォッチ