TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025134528
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032497
出願日
2024-03-04
発明の名称
検出装置、車両制御装置、検出方法、及びプログラム
出願人
本田技研工業株式会社
代理人
弁理士法人大塚国際特許事務所
主分類
G06V
20/58 20220101AFI20250909BHJP(計算;計数)
要約
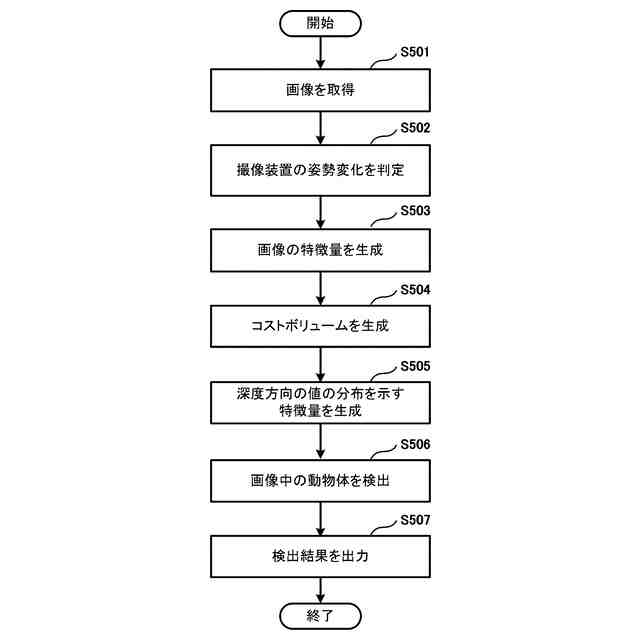
【課題】画像からの動物体検出を高速に行う。
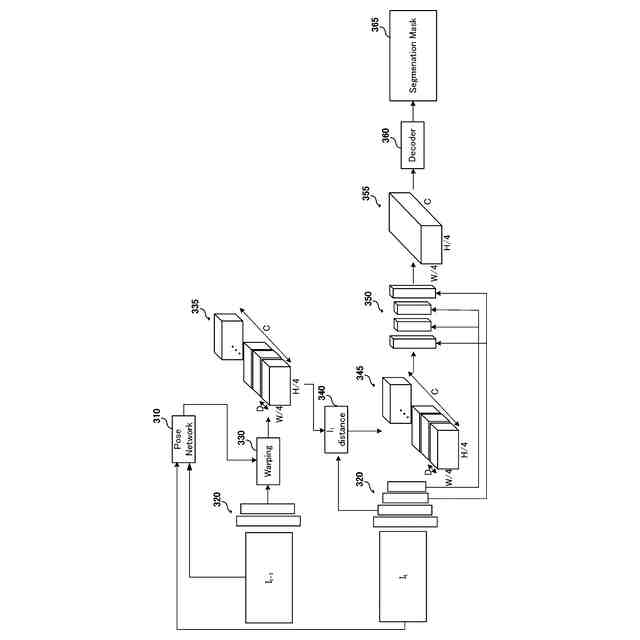
【解決手段】複数のフレームにおけるそれぞれの画像の特徴量を生成する。画像の特徴量に基づいて、複数のフレーム間のマッチングの確からしさを深度ごとに示すコストボリュームを生成する。コストボリュームにおける深度方向の値の分布を示す特徴量を生成する。深度方向の値の分布を示す特徴量に基づいて画像中の動物体を検出する。
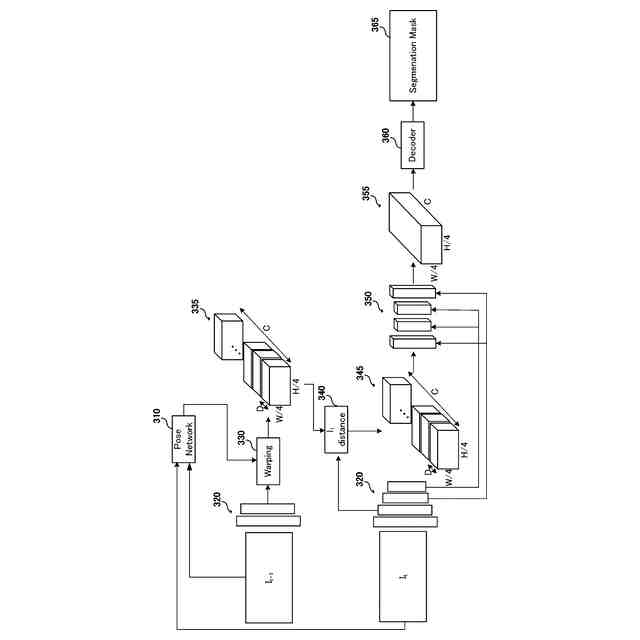
【選択図】図3
特許請求の範囲
【請求項1】
複数のフレームにおけるそれぞれの画像の特徴量を生成する第1の生成手段と、
前記画像の特徴量に基づいて、複数のフレーム間のマッチングの確からしさを深度ごとに示すコストボリュームを生成する第2の生成手段と、
前記コストボリュームにおける深度方向の値の分布を示す特徴量を生成する第3の生成手段と、
前記深度方向の値の分布を示す特徴量に基づいて前記画像中の動物体を検出する検出手段と、
を備えることを特徴とする検出装置。
続きを表示(約 870 文字)
【請求項2】
前記コストボリュームは、画像の縦及び横方向、深度方向、及びチャネル方向の次元を有する4次元コストボリュームであることを特徴とする、請求項1に記載の検出装置。
【請求項3】
前記複数のフレーム間における前記画像を撮像した撮像装置の姿勢変化を判定する判定手段をさらに備えることを特徴とする、請求項1に記載の検出装置。
【請求項4】
前記第2の生成手段は、前記姿勢変化及びそれぞれの深度に基づいて位置合わせした、第1のフレームの画像の特徴マップと第2のフレームの画像の特徴マップとの差異に基づいて、前記コストボリュームを生成することを特徴とする、請求項3に記載の検出装置。
【請求項5】
前記深度の範囲が、画像中の動物体の深度値に基づいて予め設定されていることを特徴とする、請求項1に記載の検出装置。
【請求項6】
前記第3の生成手段は、前記コストボリュームにおける深度方向の値の分布とチャネル方向の値の分布を示す特徴量を生成する、請求項1に記載の検出装置。
【請求項7】
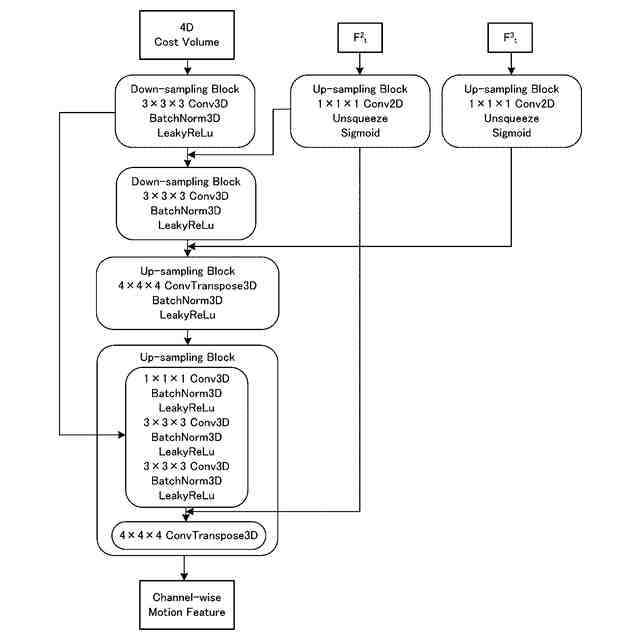
前記第3の生成手段は、前記コストボリュームに対して深度方向の畳み込み処理を行うことを特徴とする、請求項1に記載の検出装置。
【請求項8】
前記第3の生成手段は、前記コストボリュームに対して、Down Sampling BlockとUP Sampling Blockとを含むネットワークを用いた畳み込み処理を行うことを特徴とする、請求項1に記載の検出装置。
【請求項9】
前記ネットワークに含まれるDown Sampling Blockは2つであり、前記ネットワークに含まれるUp Sampling Blockは2つであることを特徴とする、請求項8に記載の検出装置。
【請求項10】
前記動物体は、車両、人、動物、及び二輪車のうちの少なくとも1つを含む、請求項1に記載の検出装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は検出装置、車両制御装置、検出方法、及びプログラムに関し、特に画像からの動物体検出に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、学習モデルを用いて、画像内の物体を認識する技術が提案されている。とりわけ、通常の物体検出器が学習していないクラスの物体を検出できるように、画像内の全ての動物体を検出する技術が検討されている。例えば、非特許文献1は、FlowNet-2を用いたOptical Flowの算出及びego flow suppression処理を行い、ResNetベースのニューラルネットワークに入力することにより、高精度な動物体検出を実現している。
【先行技術文献】
【非特許文献】
【0003】
M. Siam et al. "Video Class Agnostic Segmentation Benchmark for Autonomous Driving", Computer Vision and Pattern Recognition 2021, arXiv:2103.11015.
J. Watson et al. "The Temporal Opportunist: Self-Supervised Multi-Frame Monocular Depth", Computer Vision and Pattern Recognition 2021, arXiv:2104.14540.
K. He et al. "Deep Residual Learning for Image Recognition", Computer Vision and Pattern Recognition 2015, arXiv:1512.03385.
G. Xu et al. "Iterative Geometry Encoding Volume for Stereo Matching", Computer Vision and Pattern Recognition 2023, arXiv:2303.06615.
T. Cheng et al. "Sparse Instance Activation for Real-Time Instance Segmentation", Computer Vision and Pattern Recognition 2022, arXiv:2203.12827.
【発明の概要】
【発明が解決しようとする課題】
【0004】
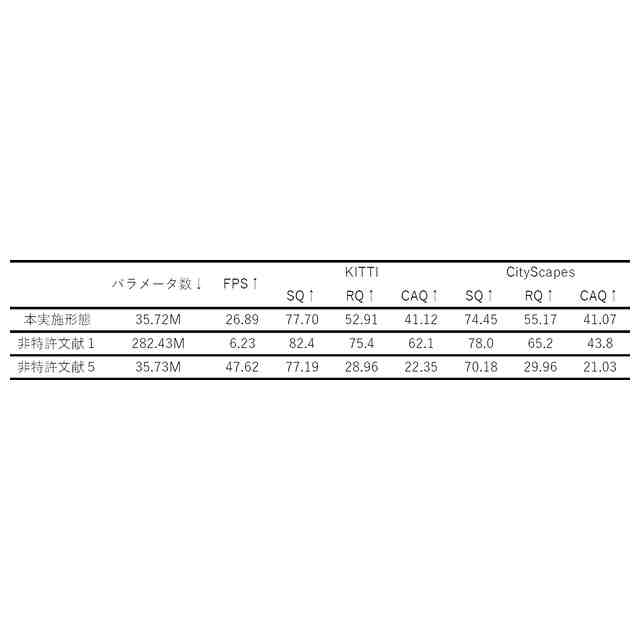
非特許文献1に記載されているような現状提案されている高精度の動物体検出器は、大規模なモデルを使用する。一方で、自動運転システム又は車両の緊急回避システムのように、リアルタイムに動物体検出を行う場合には、比較的高い精度を有しながら、高速動作が可能な軽量のモデルを用いることが望まれる。
【0005】
本発明は、画像からの動物体検出を高速に行うことを目的とする。
【課題を解決するための手段】
【0006】
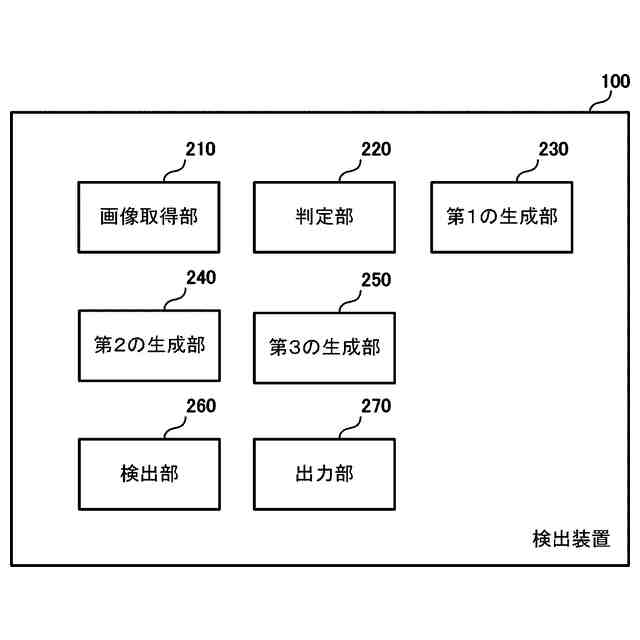
本発明の一実施形態に係る検出装置は以下の構成を備える。すなわち、
複数のフレームにおけるそれぞれの画像の特徴量を生成する第1の生成手段と、
前記画像の特徴量に基づいて、複数のフレーム間のマッチングの確からしさを深度ごとに示すコストボリュームを生成する第2の生成手段と、
前記コストボリュームにおける深度方向の値の分布を示す特徴量を生成する第3の生成手段と、
前記深度方向の値の分布を示す特徴量に基づいて前記画像中の動物体を検出する検出手段と、
を備える。
【発明の効果】
【0007】
画像からの動物体検出を高速に行うことができる。
【図面の簡単な説明】
【0008】
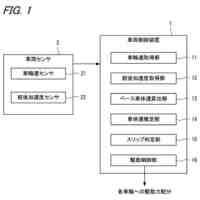
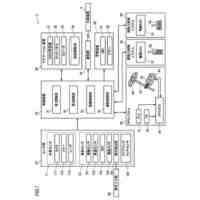
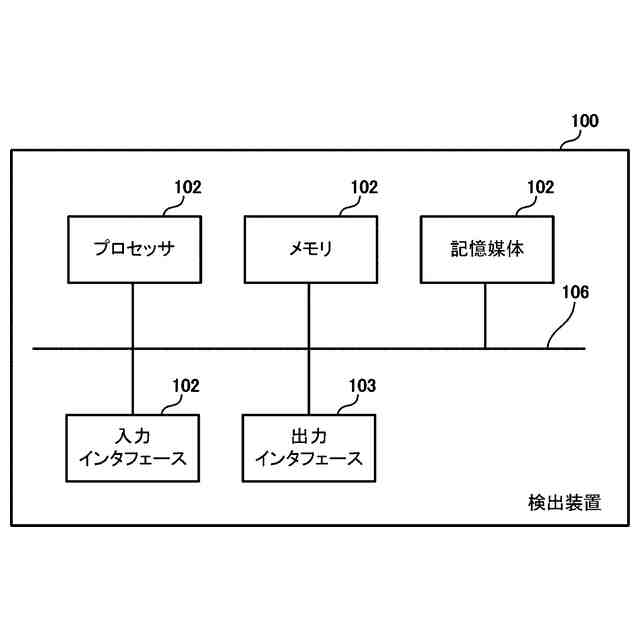
一実施形態に係る検出装置のハードウェア構成図。
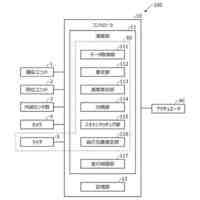
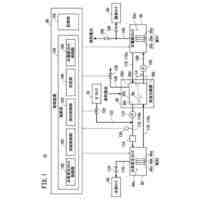
一実施形態に係る検出装置の機能構成図。
一実施形態で用いられる動体検出モデルの構成例を示す図。
一実施形態で用いられる3次元畳み込みネットワークの構成例を示す図。
一実施形態に係る検出方法のフローチャート。
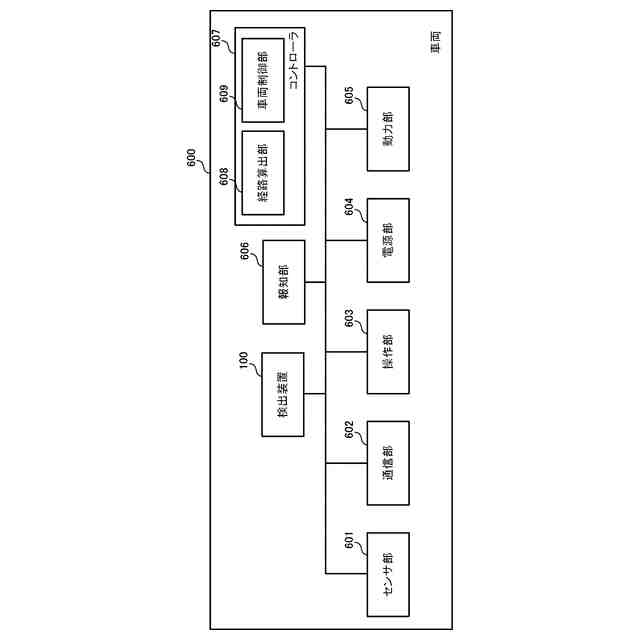
一実施形態に係る車両の機能構成図。
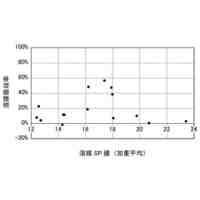
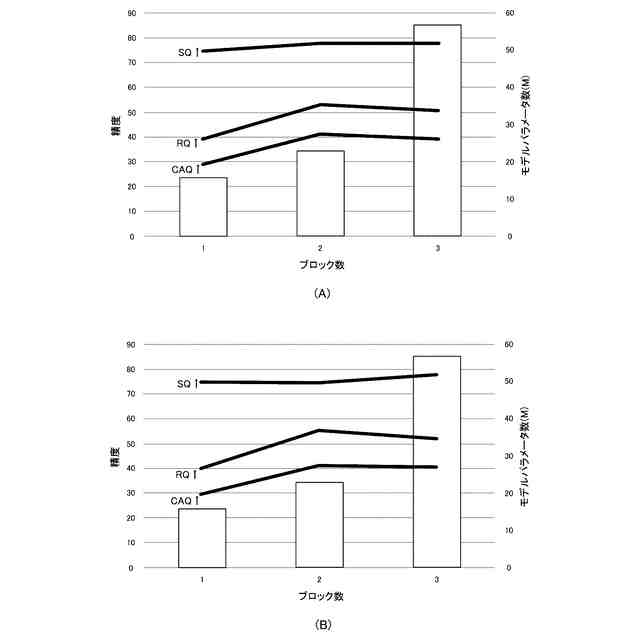
ネットワークのブロック数と検出精度との関係を示す図。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して実施形態を詳しく説明する。なお、以下の実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態で説明されている特徴の組み合わせの全てが発明に必須のものとは限らない。実施形態で説明されている複数の特徴のうち二つ以上の特徴は任意に組み合わされてもよい。また、同一若しくは同様の構成には同一の参照番号を付し、重複した説明は省略する。
【0010】
以下、本発明の一実施形態に係る検出装置100の構成についてより詳しく説明する。検出装置100は、撮像画像に基づいて動物体を検出することができる。動物体の種類は特に限定されない。動物体は、例えば、動物体は、車両、人、犬又は猫のような動物、及び二輪車のうちの少なくとも1つを含むことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
18日前
本田技研工業株式会社
電解装置
1日前
本田技研工業株式会社
ロボット
16日前
本田技研工業株式会社
回転機械
17日前
本田技研工業株式会社
触媒インク
18日前
本田技研工業株式会社
触媒インク
18日前
本田技研工業株式会社
鞍乗り型車両
17日前
本田技研工業株式会社
鞍乗り型車両
10日前
本田技研工業株式会社
鞍乗り型車両
17日前
本田技研工業株式会社
作業システム
17日前
本田技研工業株式会社
クラッチ装置
9日前
本田技研工業株式会社
鞍乗り型車両
8日前
本田技研工業株式会社
動力伝達装置
15日前
本田技研工業株式会社
鞍乗り型車両
22日前
本田技研工業株式会社
車両制御装置
24日前
本田技研工業株式会社
位置推定装置
24日前
本田技研工業株式会社
導体接合方法
24日前
本田技研工業株式会社
電力変換装置
25日前
本田技研工業株式会社
車両制御装置
2日前
本田技研工業株式会社
管理システム
25日前
本田技研工業株式会社
物体検出装置
28日前
本田技研工業株式会社
電力変換装置
29日前
本田技研工業株式会社
水電解システム
14日前
本田技研工業株式会社
水電解システム
24日前
本田技研工業株式会社
非接触受電装置
16日前
本田技研工業株式会社
電気的接続構造
1日前
本田技研工業株式会社
水電解システム
18日前
本田技研工業株式会社
燃料電池システム
29日前
本田技研工業株式会社
燃料電池システム
14日前
本田技研工業株式会社
形状計測システム
22日前
本田技研工業株式会社
電気化学スタック
9日前
本田技研工業株式会社
燃料電池システム
29日前
本田技研工業株式会社
時間変化出力回路
29日前
本田技研工業株式会社
回転電機システム
17日前
本田技研工業株式会社
サイドスタンド構造
22日前
本田技研工業株式会社
冷却装置及び飛行体
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ