TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133042
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2025018768
出願日
2025-02-06
発明の名称
姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法
出願人
重慶交通大学
,
Chongqing Jiaotong University
,
四川公路橋梁建設集団有限公司
,
中国葛洲バ集団第二工程有限公司
,
四川川交路橋有限責任公司
代理人
個人
主分類
E01D
21/00 20060101AFI20250903BHJP(道路,鉄道または橋りょうの建設)
要約
【課題】橋梁施工安全制御分野に関する姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法を提供することで、ロープ力調整と異常なロープ警報に強固な技術的保障を提供し、カンチレバー建設過程中のアーチ橋構造の安定性と安全性を大幅に向上させる。
【解決手段】ロープバックル、バックロープ、ケーブルタワーのパラメトリック非線形力学計算モデルを確立し、アーチリブセグメントの引張り過程の異なる平衡状態に基づき、各ロープの初期ロープ力、初期見かけの損傷状態、温度、空間姿勢を取得することと、各ロープ空間姿勢ベクトルをターゲットとして、パラメトリック非線形力学計算モデルを繰り返し更新し、各ロープのロープ力値を計算することと、特殊な仮想ロープ力変化ベクトルとロープ力の見かけの損失比ベクトルをさらに計算し、現在の平衡状態における非新規ロープのロープ力値をさらに取得する。
【選択図】図1
特許請求の範囲
【請求項1】
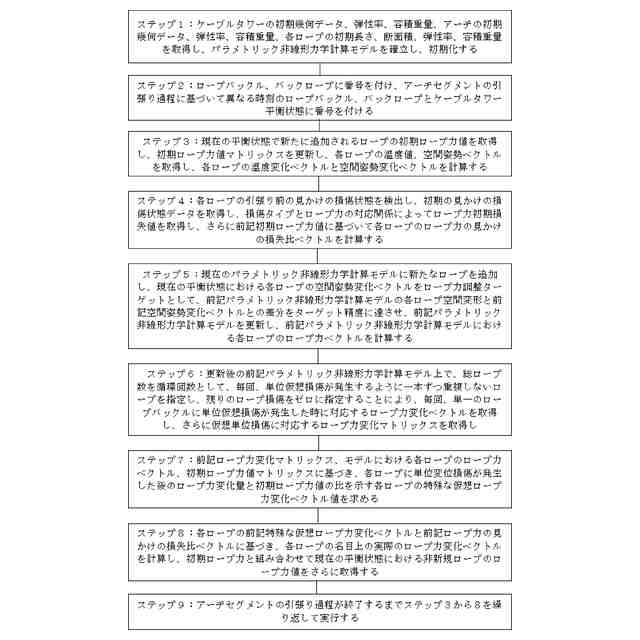
姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法であって、具体的なステップは、
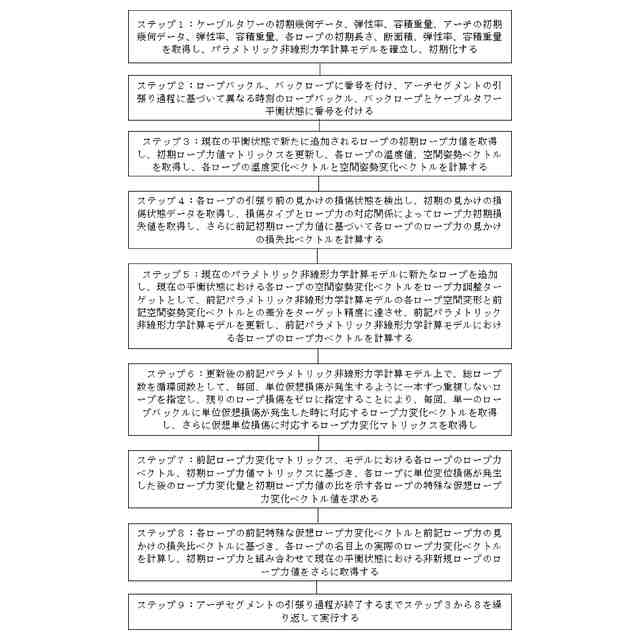
ケーブルタワーの初期幾何データ、弾性率、容積重量、アーチリブの初期幾何データ、弾性率、容積重量、各ロープの初期長さ、断面積、弾性率、容積重量を取得し、パラメトリック非線形力学計算モデルを確立し、初期化するステップ1と、
ロープバックル、バックロープに番号を付け、アーチリブセグメントの引張り過程に基づいて異なる時刻のロープバックル、バックロープとケーブルタワー平衡状態に番号を付けるステップ2と、
現在の平衡状態で新たに追加されるロープの初期ロープ力値を取得し、初期ロープ力値マトリックスを更新し、各ロープの温度値、空間姿勢ベクトルを取得し、各ロープの温度変化ベクトルと空間姿勢変化ベクトルを計算するステップ3と、
各ロープの引張り前の見かけの損傷状態を検出し、初期の見かけの損傷状態データを取得し、損傷タイプとロープ力の対応関係によってロープ力初期損失値を取得し、さらに前記初期ロープ力値に基づいて各ロープのロープ力の見かけの損失比ベクトルを計算するステップ4と、
現在のパラメトリック非線形力学計算モデルに新たなロープを追加し、現在の平衡状態における各ロープの空間姿勢変化ベクトルをロープ力調整ターゲットとして、前記パラメトリック非線形力学計算モデルの各ロープ空間変形と前記空間姿勢変化ベクトルとの差分をターゲット精度に達させ、前記パラメトリック非線形力学計算モデルを更新し、前記パラメトリック非線形力学計算モデルにおける各ロープのロープ力ベクトルを計算するステップ5と、
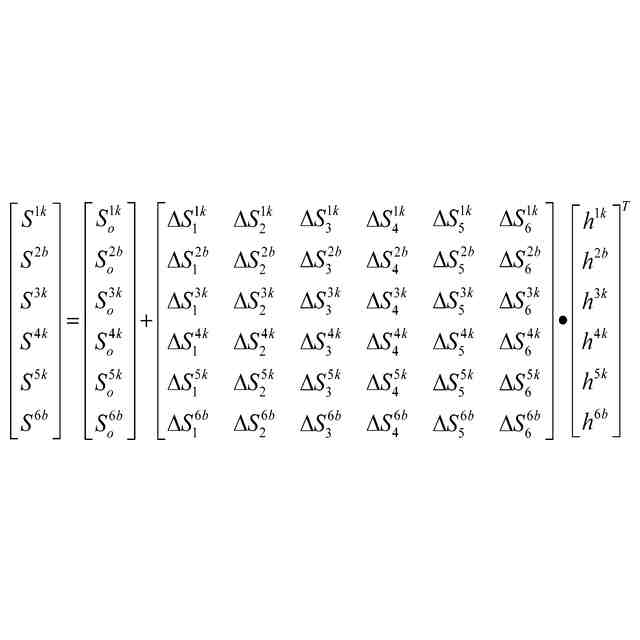
更新後の前記パラメトリック非線形力学計算モデル上で、総ロープ数を循環回数として、毎回、単位仮想損傷が発生するように一本ずつ重複しないロープを指定し、残りのロープ損傷をゼロに指定することにより、毎回、単一のロープバックルに単位仮想損傷が発生した時に対応するロープ力変化ベクトルを取得し、さらに仮想単位損傷に対応するロープ力変化マトリックスを取得するステップ6と、
前記ロープ力変化マトリックス、モデルにおける各ロープのロープ力ベクトル、初期ロープ力値マトリックスに基づき、各ロープに単位変位損傷が発生した後のロープ力変化量と初期ロープ力値の比を示す各ロープの特殊な仮想ロープ力変化ベクトル値を求めるステップ7と、
各ロープの前記特殊な仮想ロープ力変化ベクトルと前記ロープ力の見かけの損失比ベクトルに基づき、各ロープの名目上の実際のロープ力変化ベクトルを計算し、初期ロープ力と組み合わせて現在の平衡状態における非新規ロープのロープ力値をさらに取得するステップ8と、
アーチリブセグメントの引張り過程が終了するまでステップ3から8を繰り返して実行するステップ9とを含む、ことを特徴とする姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法。
続きを表示(約 1,000 文字)
【請求項2】
設計図面と現場実測に基づいて前記平衡状態と前記初期ロープ力値を確認する、ことを特徴とする請求項1に記載の姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法。
【請求項3】
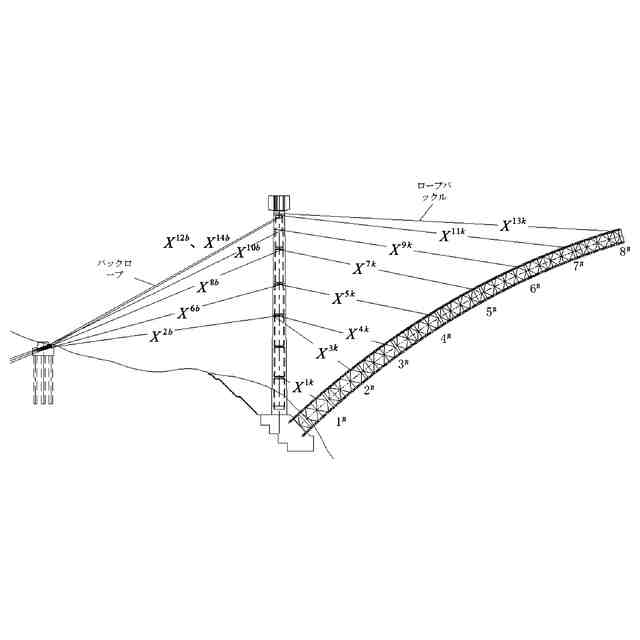
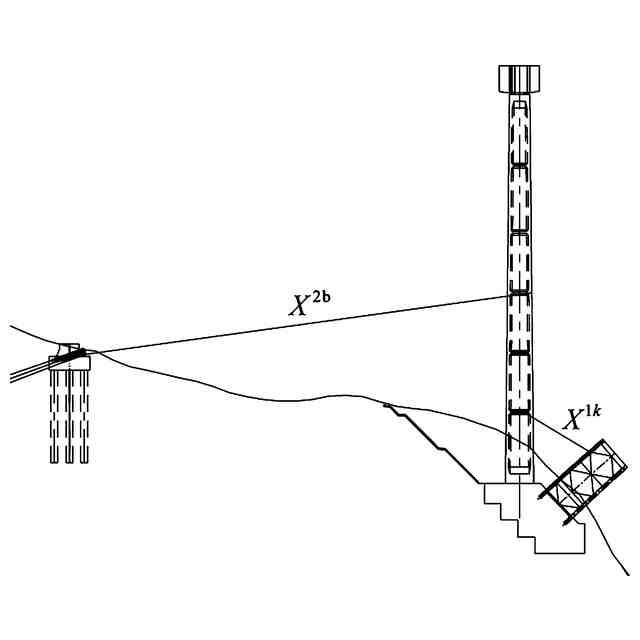
X=[X
1k
,X
2k
,…,X
nk
,X
(n+1)b
,X
(n+2)b
,…,X
wb
,]
という式に従ってロープバックル、バックロープに番号を付け、
ここで、kは、ロープXがロープバックルであることを示し、bは、ロープXがバックロープであることを示し、nがロープバックル総数であり、Wがロープバックルとバックロープの総数である、ことを特徴とする請求項1に記載の姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法。
【請求項4】
トータルステーション又は三次元レーザーのスキャンにより前記空間姿勢ベクトルを取得する、ことを特徴とする請求項1に記載の姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法。
【請求項5】
前記初期の見かけの損傷状態は、糸切れと、錆と、治具の滑りとを含む、ことを特徴とする請求項1に記載の姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法。
【請求項6】
前記ステップ5は、各ロープの温度変化ベクトル及びロープ力の見かけの損失比ベクトルに基づき、前記パラメトリック非線形力学計算モデルにおける各ロープの温度と引張り前の初期の見かけの状態を更新することをさらに含む、ことを特徴とする請求項1に記載の姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法。
【請求項7】
前記ステップ6は、i番目のロープバックルのみに単位変位の仮想損傷が発生することを考慮し、前記パラメトリック非線形力学計算モデルに基づき、各ロープのロープ力変化ベクトルを計算することと、全てのi値を一々計算する場合、i番目のロープバックルのみに単位変位の仮想損傷が発生した時の各ロープのロープ力変化ベクトルを考慮し、仮想単位損傷に対応するロープ力変化マトリックスを取得することとを含む、ことを特徴とする請求項1に記載の姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、橋梁施工安全制御分野に関し、より具体的には、姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
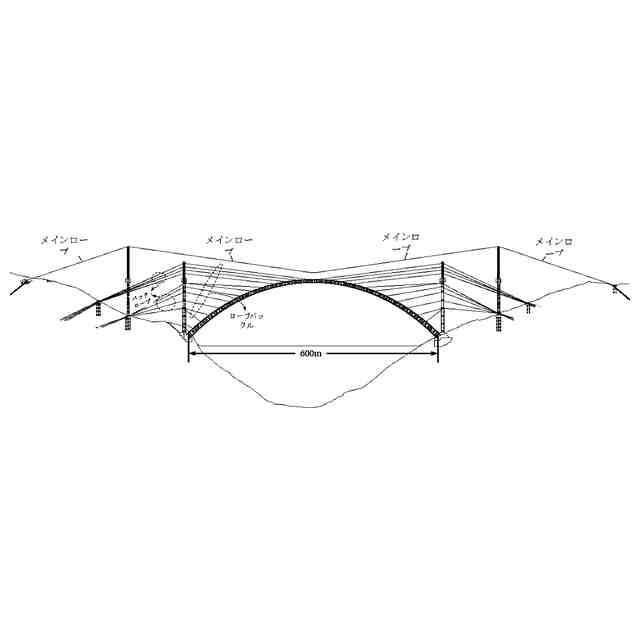
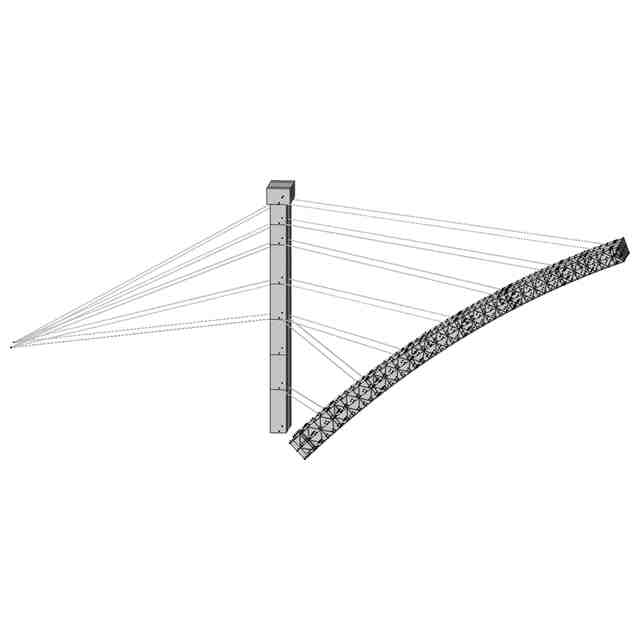
大スパン又は超大スパンアーチ橋の建設中、カンチレバー建設は、効率的且つよく使われている方法である。この過程で、ケーブルタワーは、一時的な構造として、アーチリブに支持を提供するだけでなく、ロープバックルとバックロープの合理的な配置により、施工段階での構造の安定性と安全性を維持し、ロープバックルは、主にメインアーチの区分建設施工にサポートを提供するために用いられるが、バックロープは、ロープバックルによる力をバランスさせることによって、構造の平衡状態を保つために用いられ、このような力の平衡は、精確な計算とロープ力の細かい調整によって実現される。
【0003】
しかし、施工中、次のアーチリブセグメントを引張った後に、前列アーチリブセグメントの空間姿勢が変化するとともに、ロープバックル、バックロープのロープ力状態も変化し、このような変化は、アーチリブ自重と施工荷重の影響を受けるだけでなく、製造誤差、施工制御のばらつき、ロープ構造の緩みなどの要素の影響を受けることによって、ロープバックルとバックロープのロープ力状態を正確に評価することが困難になり、施工フロー全体の安全を確保することができない。
【0004】
そのため、どのように各ロープ力値を正確に計算し、及び異常なロープの位置を識別するかは、当業者が早急に解決しなければならない問題となる。
【発明の概要】
【発明が解決しようとする課題】
【0005】
これに関連して、本発明は、姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法を提供することで、各アーチリブセグメント引張りの平衡後の各ロープのロープ力値を正確に取得し、異常なロープの位置とロープ力値を正確に識別し、上記目的を実現するために、本発明は、以下の技術的解決手段を提供する。
【課題を解決するための手段】
【0006】
本発明は、姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法を開示し、具体的なステップは、以下の通りである。
【0007】
姿勢駆動下でのロープバックルとバックロープの内力の逆方向分析方法であって、具体的なステップは、以下の通りであることを特徴とする。
【0008】
ステップ1:ケーブルタワーの初期幾何データ、弾性率、容積重量、アーチリブの初期幾何データ、弾性率、容積重量、各ロープの初期長さ、断面積、弾性率、容積重量を取得し、パラメトリック非線形力学計算モデルを確立し、初期化する。
【0009】
ステップ2:ロープバックル、バックロープに番号を付け、アーチリブセグメントの引張り過程に基づいて異なる時刻のロープバックル、バックロープとケーブルタワー平衡状態に番号を付ける。
【0010】
ステップ3:現在の平衡状態で新たに追加されるロープの初期ロープ力値を取得し、初期ロープ力値マトリックスを更新し、各ロープの温度値、空間姿勢ベクトルを取得し、各ロープの温度変化ベクトルと空間姿勢変化ベクトルを計算する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ