TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025127953
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2024024976
出願日
2024-02-21
発明の名称
電動車両の制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B60L
15/20 20060101AFI20250826BHJP(車両一般)
要約
【課題】前輪及び後輪のいずれか一方の電動機システムに負荷が偏り、出力制限にかかるリスクを低減できる電動車両の制御装置を提供する。
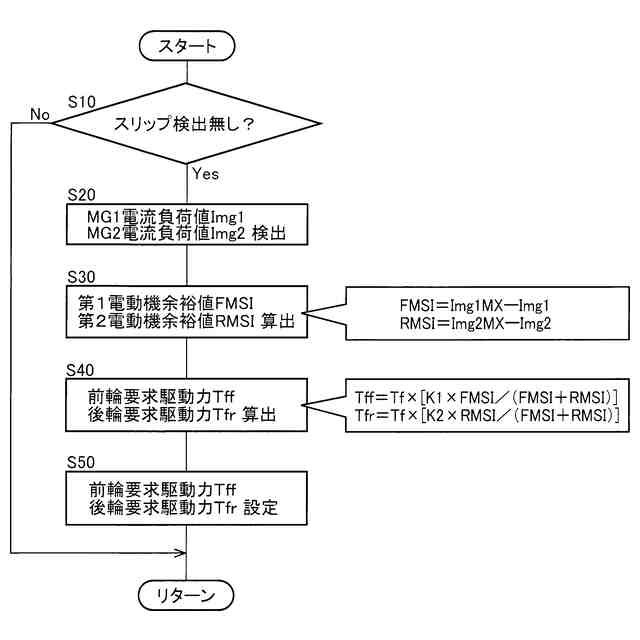
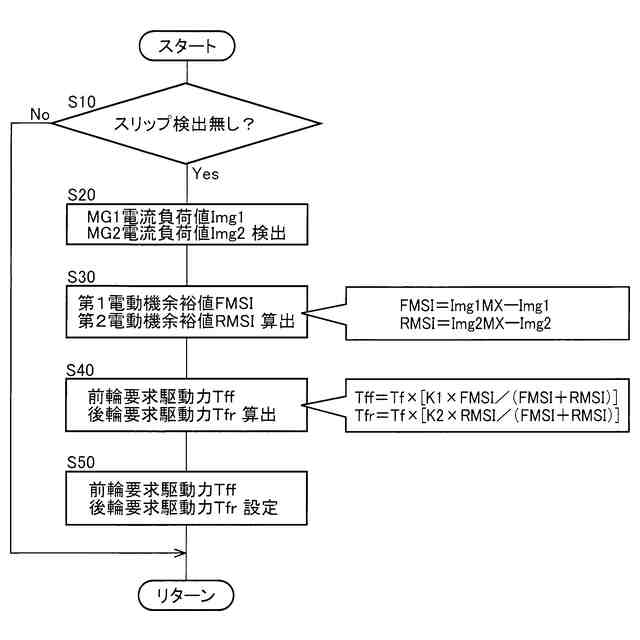
【解決手段】スリップ検出部42がスリップ検出していない走行状態の場合は、平準化制御部44は、電動機システムMG1sysの第1負荷耐性値Img1MXから走行中のMG1電流負荷値Img1を減算した第1電動機余裕値FMSIと、電動機システムMG2sysの第2負荷耐性値Img2MXから走行中のMG2電流負荷値Img2を減算した第2電動機余裕値RMSIと、車両の要求駆動力Tfと、から式(1)及び式(2)に従って、前輪要求駆動力Tffと後輪要求駆動力Tfrとを算出し、設定する。
Tff=Tr×[K1×FMSI/(FMSI+RMSI)]・・・(1)
Tfr=Tr×[K2×RMSI/(FMSI+RMSI)]・・・(2)
但し、K1及びK2は係数
【選択図】図2
特許請求の範囲
【請求項1】
前輪を駆動する第1電動機と、後輪を駆動する第2電動機と、を備えた電動車両の、制御装置であって、
前記前輪及び前記後輪のスリップ検出を行うスリップ検出部と、前記第1電動機と前記第2電動機との負荷の平準化制御を行う平準化制御部と、を含むものであり、
前記スリップ検出部がスリップ検出していない走行状態の場合は、前記平準化制御部は、前記第1電動機に負荷可能な電流の最大値として設定された第1負荷耐性値から前記第1電動機の走行中の電流負荷値を減算した第1電動機余裕値FMSIと、前記第2電動機に負荷可能な電流の最大値として設定された第2負荷耐性値から前記第2電動機の走行中の電流負荷値を減算した第2電動機余裕値RMSIと、車両の要求駆動力Tfと、から次式(1)及び次式(2)に従って、前記前輪への前輪要求駆動力Tffと前記後輪への後輪要求駆動力Tfrとを算出し、設定する
Tff=Tf×[K1×FMSI/(FMSI+RMSI)]・・・(1)
Tfr=Tf×[K2×RMSI/(FMSI+RMSI)]・・・(2)
但し、K1及びK2は係数
ことを特徴とする電動車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動車両の制御装置に関するものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
電動機を備え、主駆動輪または副駆動輪を駆動する電動車両が知られている。前記電動機及びその駆動回路(以下、電動機システムとする)には、温度保護が行われている。例えば、高負荷継続による発熱で、電動機システムの温度が所定値を超えると、信頼性や安全性確保のため、電動機に対しての出力制限がかけられる。出力制限がかけられると走行に支障をきたす為、出力制限にかからないよう、即ち、電動機システムが過度に温度上昇しないよう、予め出力を制御する技術が開示されている。例えば、特許文献1に記載された出力制御がそれである。
【先行技術文献】
【特許文献】
【0003】
特開2015-220802号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された技術は、主駆動源を補助する補助電動機に対する出力制御であるが、このような出力制御は、前輪を駆動する第1電動機と、後輪を駆動する第2電動機と、を備えた電動車両においても求められる。前記電動車両では、ドライバビリティを良くするように、前輪と後輪との駆動力配分が行われるが、ドライバビリティを優先した駆動力配分では、前輪及び後輪のいずれか一方の電動機システムに負荷が偏り、出力制限にかかるリスクがあった。
【0005】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、前輪及び後輪のいずれか一方の電動機システムに負荷が偏り、出力制限にかかるリスクを低減できる電動車両の制御装置を提供することにある。
【課題を解決するための手段】
【0006】
第1発明の要旨とするところは、(a)前輪を駆動する第1電動機と、後輪を駆動する第2電動機と、を備えた電動車両の、制御装置であって、(b)前記前輪及び前記後輪のスリップ検出を行うスリップ検出部と、前記第1電動機と前記第2電動機との負荷の平準化制御を行う平準化制御部と、を含むものであり、(c)前記スリップ検出部がスリップ検出していない走行状態の場合は、前記平準化制御部は、前記第1電動機に負荷可能な電流の最大値として設定された第1負荷耐性値から前記第1電動機の走行中の電流負荷値を減算した第1電動機余裕値FMSIと、前記第2電動機に負荷可能な電流の最大値として設定された第2負荷耐性値から前記第2電動機の走行中の電流負荷値を減算した第2電動機余裕値RMSIと、車両の要求駆動力Tfと、から次式(1)及び次式(2)に従って、前記前輪への前輪要求駆動力Tffと前記後輪への後輪要求駆動力Tfrとを算出し、設定することを特徴とする。
Tff=Tf×[K1×FMSI/(FMSI+RMSI)]・・・(1)
Tfr=Tf×[K2×RMSI/(FMSI+RMSI)]・・・(2)
但し、K1及びK2は係数
【発明の効果】
【0007】
第1発明によれば、前記スリップ検出部がスリップ検出していない走行状態の場合は、前記平準化制御部は、前記第1電動機に負荷可能な電流の最大値として設定された第1負荷耐性値から前記第1電動機の走行中の電流負荷値を減算した第1電動機余裕値FMSIと、前記第2電動機に負荷可能な電流の最大値として設定された第2負荷耐性値から前記第2電動機の走行中の電流負荷値を減算した第2電動機余裕値RMSIと、車両の要求駆動力Tfと、から式(1)及び式(2)に従って、前記前輪への前輪要求駆動力Tffと前記後輪への後輪要求駆動力Tfrとを算出し、設定する。これにより、スリップが発生しておらず、スリップ回避のための前後輪の駆動力配分が必要とされない通常の走行状態では、前記第1電動機と前記第2電動機との、負荷の余裕値の大きい方に、より大きい要求駆動力が配分されることで、負荷が平準化されるため、前記第1電動機、または前記第2電動機が、出力制限にかかるリスクを低減することができる。
【図面の簡単な説明】
【0008】
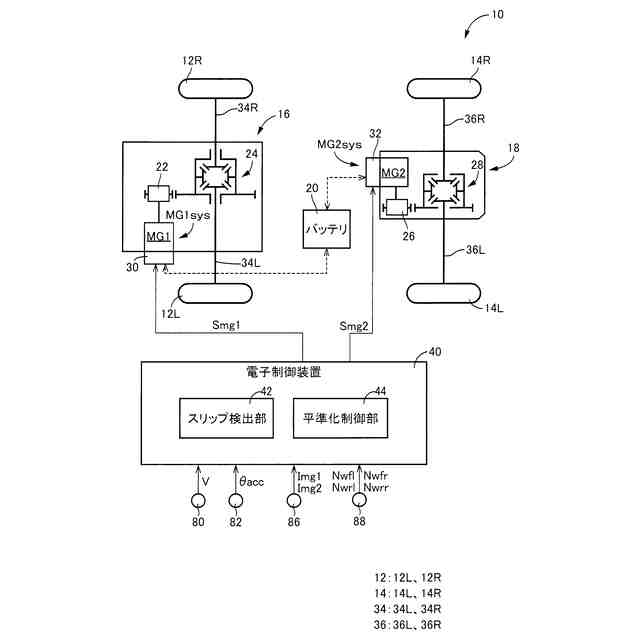
本発明が適用される車両の概略構成を説明する図であると共に、車両における各種制御の為の制御機能及び制御系統の要部を説明する図である。
電子制御装置の制御作動の要部を説明するフローチャートであり、第1電動機と第2電動機との負荷の平準化の制御作動を説明するフローチャートである。
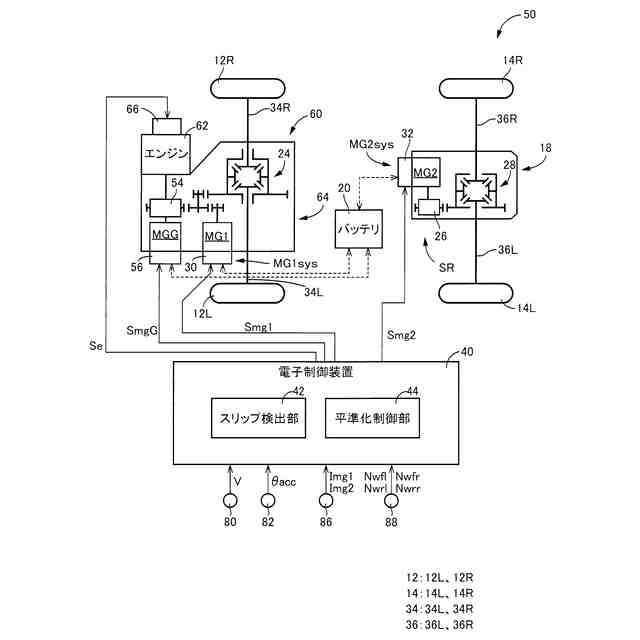
本発明が適用される車両の別の実施例を示す、図1に相当する図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施例を図面を参照して詳細に説明する。
【実施例】
【0010】
図1は、本発明が適用される車両10の概略構成を説明する図であると共に、車両10における各種制御の為の制御機能及び制御系統の要部を説明する図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ