TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025125642
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024021694
出願日
2024-02-16
発明の名称
制御システム
出願人
ダイキン工業株式会社
代理人
弁理士法人新樹グローバル・アイピー
主分類
G05B
13/04 20060101AFI20250821BHJP(制御;調整)
要約
【課題】設備機器が、設置される現地によって構成が大きく異なるものである場合、当該設備機器に類似する機器の運転データを利用することができず、運用開始前に制御モデルを学習することができない。そのため、運用開始時は、制御モデルを用いて効率的に設備機器を制御することができない。
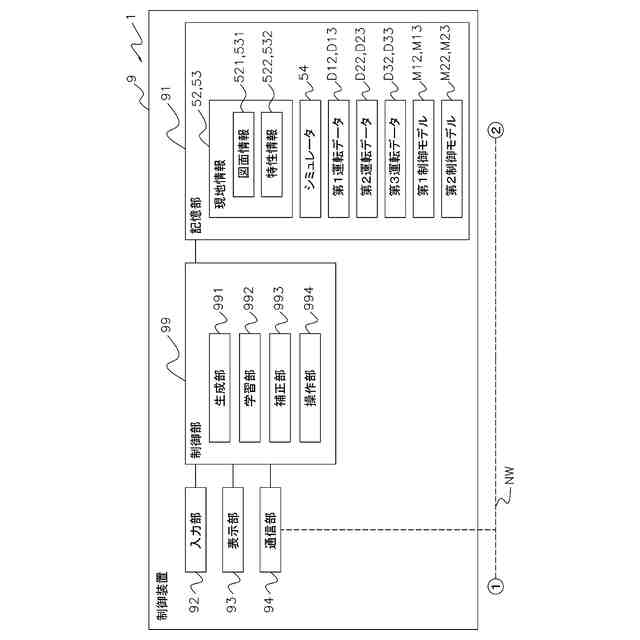
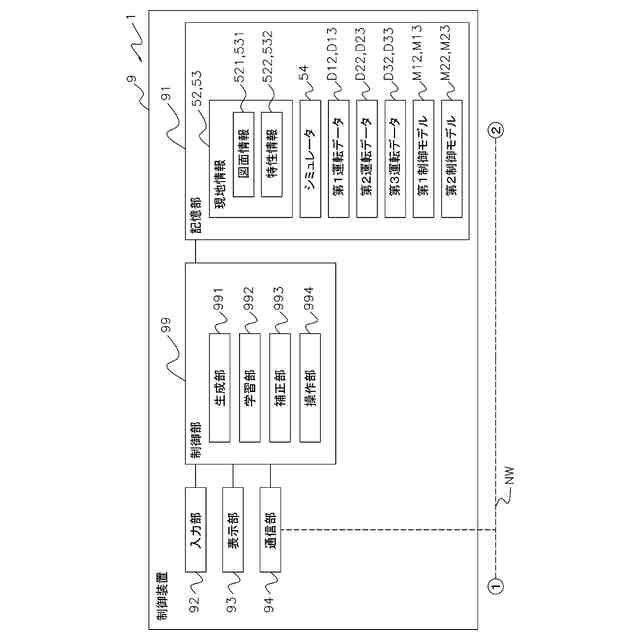
【解決手段】制御システム1は、設備機器と、制御部99と、を備える。制御部99は、現地情報52,53に基づいて、設備機器のダミーの運転データである第1運転データD12,D13を生成する。現地情報52,53は、設備機器が設置される現地における、設備機器の情報である。制御部99は、第1運転データD12,D13を用いて、第1制御モデルM12,M13を学習する。制御部99は、第1制御モデルM12,M13により、設備機器を制御する。
【選択図】図5
特許請求の範囲
【請求項1】
設備機器(2,3)と、
前記設備機器を制御する制御部(99)と、
を備え、
前記制御部は、
前記設備機器が設置される現地における、前記設備機器の情報である現地情報(52,53)に基づいて、前記設備機器のダミーの運転データである第1運転データ(D12,D13)を生成し、
前記第1運転データを用いて、第1制御モデル(M12,M13)を学習し、
前記第1制御モデルにより、前記設備機器を制御する、
制御システム(1)。
続きを表示(約 1,100 文字)
【請求項2】
前記現地情報は、前記設備機器の図面情報(521,531)、および前記設備機器の特性情報(522,532)、を含み、
前記制御部は、前記現地情報に基づいて、理論物理モデルを用いたシミュレーションにより、前記第1運転データを生成する、
請求項1に記載の制御システム(1)。
【請求項3】
前記制御部は、
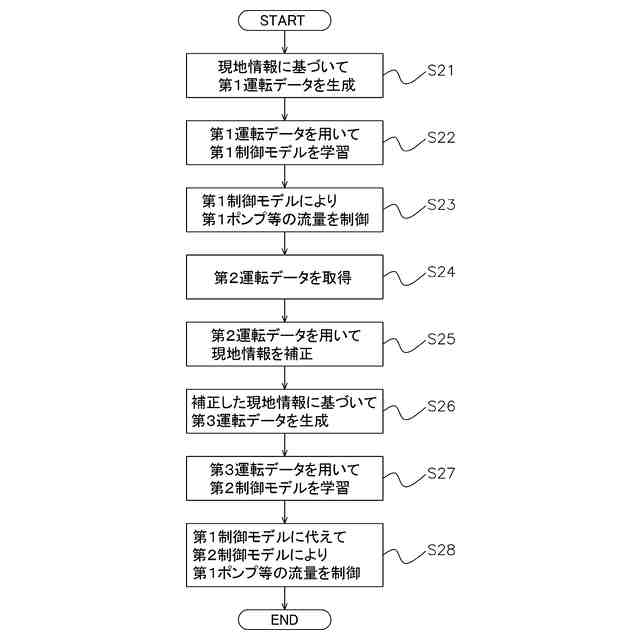
前記設備機器の実際の運転データである第2運転データ(D22,D23)を取得し、
前記第2運転データを用いて、前記現地情報を補正し、
補正した前記現地情報に基づいて、前記シミュレーションにより、前記設備機器の第3運転データ(D32,D33)を生成し、
前記第3運転データを用いて、第2制御モデル(M22,M23)を学習し、
前記第2制御モデルにより、前記設備機器を制御する、
請求項2に記載の制御システム(1)。
【請求項4】
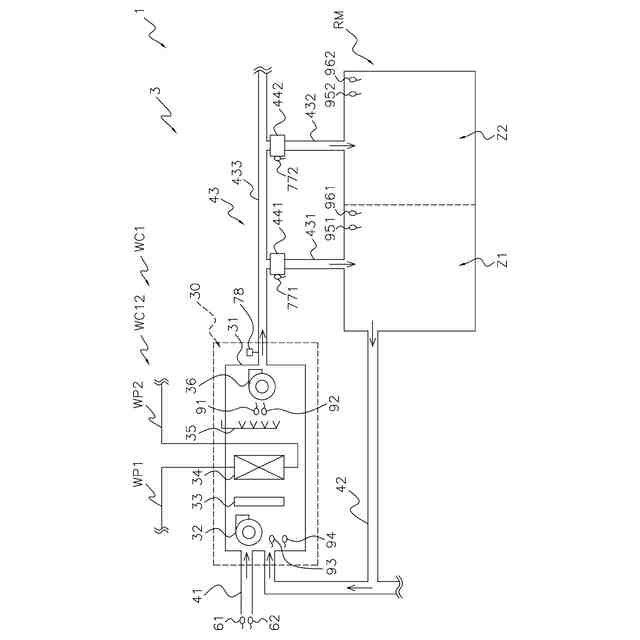
前記設備機器は、媒体を搬送する第1管(WP1~WP5,43)と、前記媒体の流れを制御する1つまたは複数の第1機器(15a,15b,22,36,441,442)と、を有し、
前記図面情報は、前記第1管の配置と、前記第1機器の配置と、を含み、
前記第1管の配置は、前記第1管の長さ、高さ、および形状を含み、
前記制御部は、前記第1制御モデルまたは前記第2制御モデルにより、前記第1機器を制御する、
請求項1から3のいずれか1つに記載の制御システム(1)。
【請求項5】
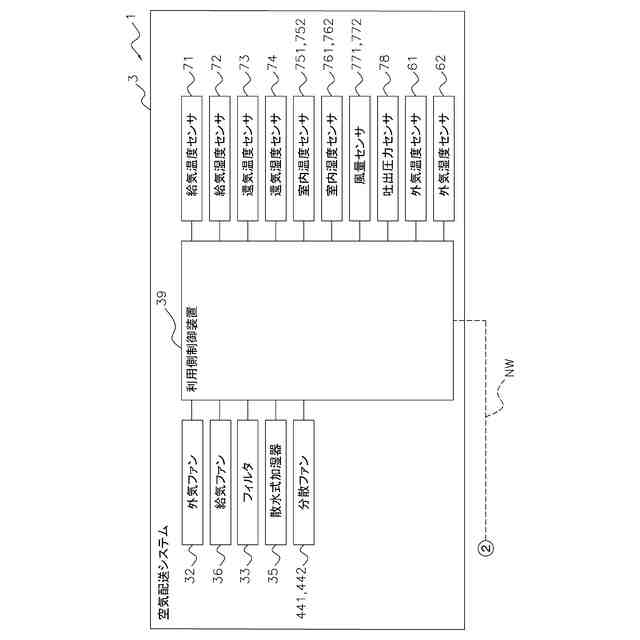
前記設備機器は、空気搬送システム(3)であり、
前記第1管は、ダクト(43)であり、
前記媒体は、空気であり、
前記第1機器は、ファン(36,441,442)を含み、
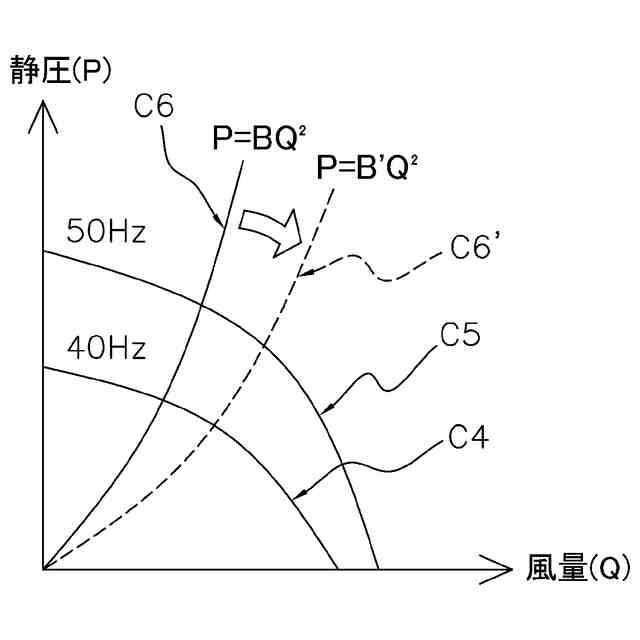
前記設備機器の運転データは、前記ファンの風量、前記ファンの静圧、および前記ファンの周波数を含み、
前記制御部は、前記第1制御モデルまたは前記第2制御モデルにより、前記ファンの風量を制御する、
請求項4に記載の制御システム(1)。
【請求項6】
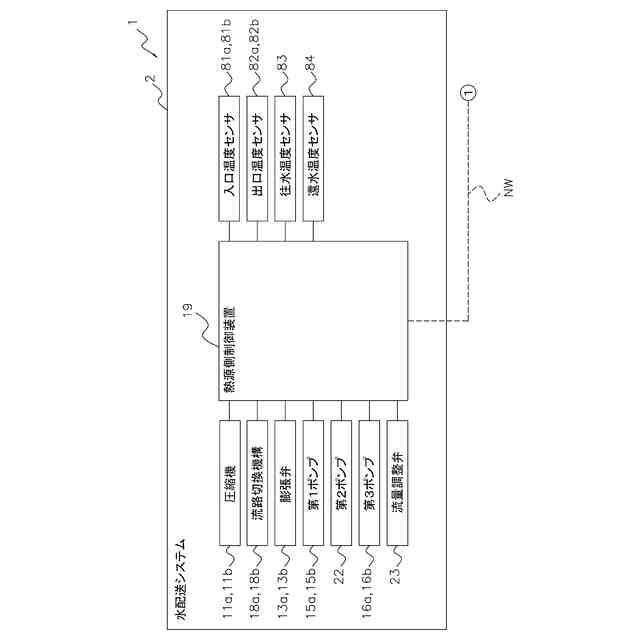
前記設備機器は、水搬送システム(2)であり、
前記第1管は、水配管(WP1~WP5)であり、
前記媒体は、水であり、
前記第1機器は、ポンプ(15a,15b,22)を含み、
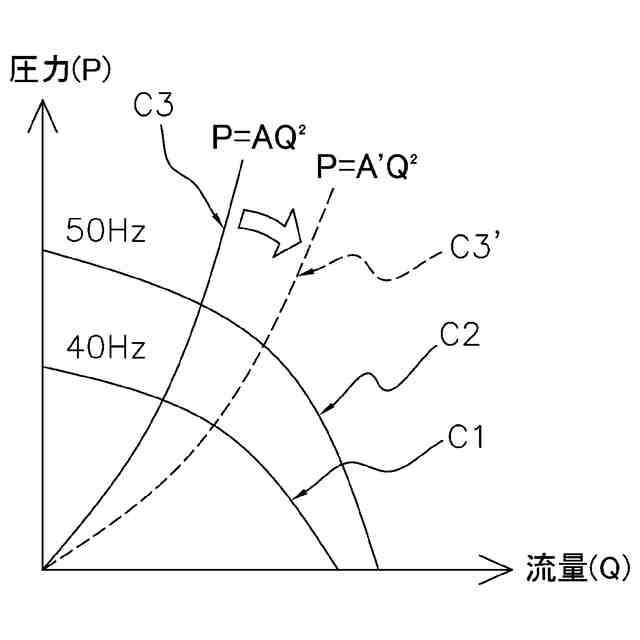
前記設備機器の運転データは、前記ポンプの流量、前記ポンプの圧力、および前記ポンプの周波数を含み、
前記制御部は、前記第1制御モデルまたは前記第2制御モデルにより、前記ポンプの流量を制御する、
請求項4に記載の制御システム(1)。
発明の詳細な説明
【技術分野】
【0001】
制御システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1(特開2022-145655号公報)に示されているように、設備機器の運転データがない場合に、当該設備機器に類似する機器の運転データを利用して、設備機器を制御する制御モデルを学習する技術がある。
【発明の概要】
【発明が解決しようとする課題】
【0003】
設備機器が、設置される現地によって構成が大きく異なるものである場合、特許文献1では、当該設備機器に類似する機器の運転データを利用することができず、設備機器の運用開始前に制御モデルを学習することができない。そのため、設備機器が、設置される現地によって構成が大きく異なるものである場合、特許文献1では、設備機器の運用開始時は、制御モデルを用いて効率的に設備機器を制御することができない、という課題がある。
【課題を解決するための手段】
【0004】
第1観点の制御システムは、設備機器と、制御部と、を備える。制御部は、設備機器を制御する。制御部は、現地情報に基づいて、第1運転データを生成する。現地情報は、設備機器が設置される現地における、設備機器の情報である。第1運転データは、設備機器のダミーの運転データである。制御部は、第1運転データを用いて、第1制御モデルを学習する。制御部は、第1制御モデルにより、設備機器を制御する。
【0005】
第1観点の制御システムでは、制御部は、現地情報に基づいて、第1運転データを生成する。現地情報は、設備機器が設置される現地における、設備機器の情報である。第1運転データは、設備機器のダミーの運転データである。そのため、制御システムは、設備機器が、設置される現地によって構成が大きく異なるものであっても、設備機器の運用開始前に設備機器の第1運転データを生成し、第1制御モデルを学習することができる。その結果、制御システムは、設備機器が、設置される現地によって構成が大きく異なるものであっても、設備機器の運用開始時から、第1制御モデルを用いて効率的に設備機器を制御することができる。
【0006】
第2観点の制御システムは、第1観点の制御システムであって、現地情報は、設備機器の図面情報、および設備機器の特性情報、を含む。制御部は、現地情報に基づいて、理論物理モデルを用いたシミュレーションにより、第1運転データを生成する。
【0007】
第2観点の制御システムは、このような構成により、様々な種類の運転データを、大量に生成することができる。
【0008】
第3観点の制御システムは、第2観点の制御システムであって、制御部は、第2運転データを取得する。第2運転データは、設備機器の実際の運転データである。制御部は、第2運転データを用いて、現地情報を補正する。制御部は、補正した現地情報に基づいて、シミュレーションにより、第3運転データを生成する。第3運転データは、設備機器の運転データである。制御部は、第3運転データを用いて、第2制御モデルを学習する。制御部は、第2制御モデルにより、設備機器を制御する。
【0009】
第3観点の制御システムでは、補正した現地情報に基づいて、シミュレーションにより、第3運転データを生成する。制御部は、第3運転データを用いて、第2制御モデルを学習する。制御部は、第2制御モデルにより、設備機器を制御する。その結果、制御システムは、より精度良く、設備機器を制御することができる。
【0010】
第4観点の制御システムは、第1観点から第3観点のいずれか1つの制御システムであって、設備機器は、第1管と、1つまたは複数の第1機器と、を有する。第1管は、媒体を搬送する。第1機器は、媒体の流れを制御する。図面情報は、第1管の配置と、第1機器の配置と、を含む。第1管の配置は、第1管の長さ、高さ、および形状を含む。制御部は、第1制御モデルまたは第2制御モデルにより、第1機器を制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ