TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025118579
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2025014885
出願日
2025-01-31
発明の名称
推定装置、推定方法、プログラム、車両制御装置、および車両
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
G06N
3/0985 20230101AFI20250805BHJP(計算;計数)
要約
【課題】機械学習モデルが出力するロジットを高精度に補正することによって、生成される機械学習モデルの精度を向上させること。
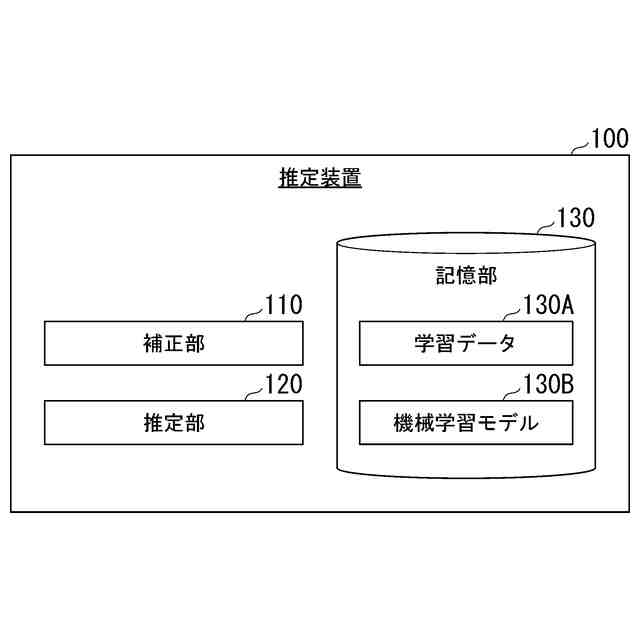
【解決手段】データを入力として、前記データの少なくとも一部がある種別を表すクラスに該当するロジットを出力するように学習された機械学習モデルに、対象データを入力することによって前記ロジットを取得し、前記機械学習モデルの出力を用いて、前記ロジットを補正するための補正値を算出する補正部と、算出された前記補正値に基づいて前記ロジットを補正し、補正された前記ロジットに基づいて、前記対象データのうち前記少なくとも一部が該当するクラスを推定する推定部と、を備える、推定装置。
【選択図】図1
特許請求の範囲
【請求項1】
データを入力として、前記データの少なくとも一部がある種別を表すクラスに該当するロジットを出力するように学習された機械学習モデルに、対象データを入力することによって前記ロジットを取得し、前記機械学習モデルの出力を用いて、前記ロジットを補正するための補正値を算出する補正部と、
算出された前記補正値に基づいて前記ロジットを補正し、補正された前記ロジットに基づいて、前記対象データのうち前記少なくとも一部が該当するクラスを推定する推定部と、を備える、
推定装置。
続きを表示(約 1,100 文字)
【請求項2】
前記補正部は、予め設定されたハイパーパラメータと、前記機械学習モデルの出力とを用いて、前記補正値を算出する、
請求項1に記載の推定装置。
【請求項3】
前記補正部は、前記ハイパーパラメータと、前記機械学習モデルによって定義される周辺分布から算出される、前記クラスのサンプルが発生する事前確率との積によって、前記補正値を算出する、
請求項2に記載の推定装置。
【請求項4】
前記推定部は、前記ロジットに前記補正値を加算することによって前記ロジットを補正し、補正した前記ロジットに基づく確率値が最大となるクラスを、前記対象データのうち前記少なくとも一部が該当するクラスとして推定する、
請求項1に記載の推定装置。
【請求項5】
前記データは、複数のピクセルを含む画像であり、前記データの少なくとも一部は、前記画像のうちの一以上のピクセル群である、
請求項1に記載の推定装置。
【請求項6】
前記データは、音声であり、前記データの少なくとも一部は、前記音声の区間である、
請求項1に記載の推定装置。
【請求項7】
請求項1に記載の推定装置と、
前記推定装置による推定結果に基づいて、車両の走行を制御する車両制御部と、を備える、
車両制御装置。
【請求項8】
請求項7に記載の車両制御装置を備える、
車両。
【請求項9】
コンピュータが、
データを入力として、前記データの少なくとも一部がある種別を表すクラスに該当するロジットを出力するように学習された機械学習モデルに、対象データを入力することによって前記ロジットを取得し、前記機械学習モデルの出力を用いて、前記ロジットを補正するための補正値を算出し、
算出された前記補正値に基づいて前記ロジットを補正し、補正された前記ロジットに基づいて、前記対象データのうち前記少なくとも一部が該当するクラスを推定する、
推定方法。
【請求項10】
コンピュータに、
データを入力として、前記少なくとも一部がある種別を表すクラスに該当するロジットを出力するように学習された機械学習モデルに、対象データを入力することによって前記ロジットを取得し、前記機械学習モデルの出力を用いて、前記ロジットを補正するための補正値を算出させ、
算出された前記補正値に基づいて前記ロジットを補正し、補正された前記ロジットに基づいて、前記対象データのうち前記少なくとも一部が該当するクラスを推定させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、推定装置、推定方法、プログラム、車両制御装置、および車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、画像を入力として、当該画像に含まれる物体の種別をクラス分類する機械学習モデルの学習において、教師データ(サンプル)の数に関するクラス間の不均衡に伴うモデルの推定精度の低下を防止する技術が知られている。例えば、非特許文献1には、各クラスに対応するサンプルの数に応じて、学習に用いる誤差関数の重み(各クラスに対応する誤差関数の重み)およびロジット(機械学習モデルの出力値)を補正する技術が記載されている。
【先行技術文献】
【非特許文献】
【0003】
Menon et al., “Long-tail learning via logit adjustment”
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献1に記載の技術は、教師データ全体のサンプル数と、各クラスのサンプル数とを用いて、ロジットを補正するものである。しかしながら、このような簡易的手法では、ロジットが高精度に補正されず、結果として、生成される機械学習モデルの精度が低くなる場合があった。
【0005】
本発明は、このような事情を考慮してなされたものであり、機械学習モデルが出力するロジットを高精度に補正することによって、生成される機械学習モデルの精度を向上させることができる推定装置、推定方法、プログラム、車両制御装置、および車両を提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る推定装置、推定方法、プログラム、車両制御装置、および車両は、以下の構成を採用した。
(1):この発明の一態様に係る推定装置は、データを入力として、前記データの少なくとも一部がある種別を表すクラスに該当するロジットを出力するように学習された機械学習モデルに、対象データを入力することによって前記ロジットを取得し、前記機械学習モデルの出力を用いて、前記ロジットを補正するための補正値を算出する補正部と、算出された前記補正値に基づいて前記ロジットを補正し、補正された前記ロジットに基づいて、前記対象データのうち前記少なくとも一部が該当するクラスを推定する推定部と、を備えるものである。
【0007】
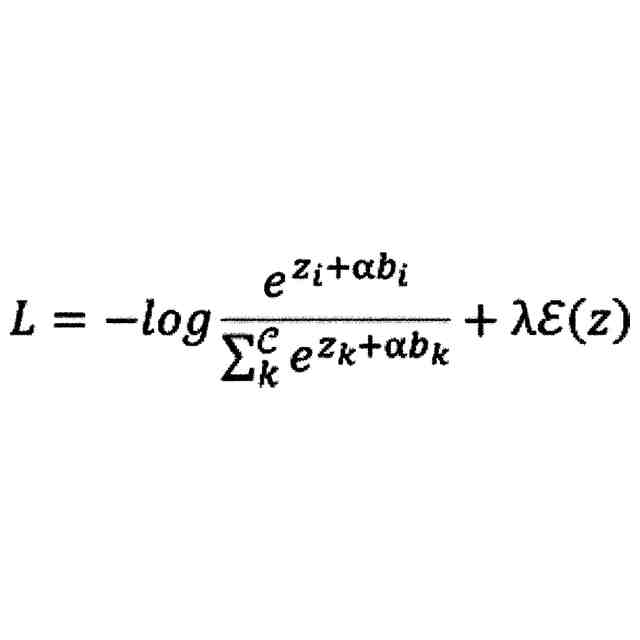
(2):上記(1)の態様において、前記補正部は、予め設定されたハイパーパラメータと、前記機械学習モデルの出力とを用いて、前記補正値を算出するものである。
【0008】
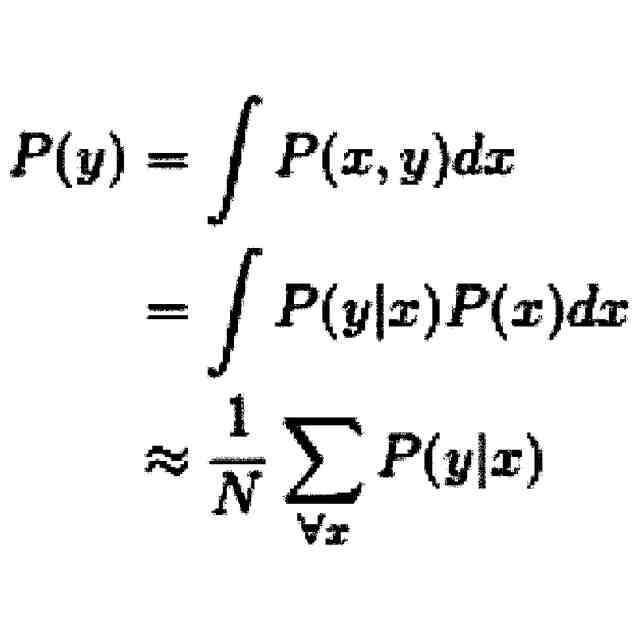
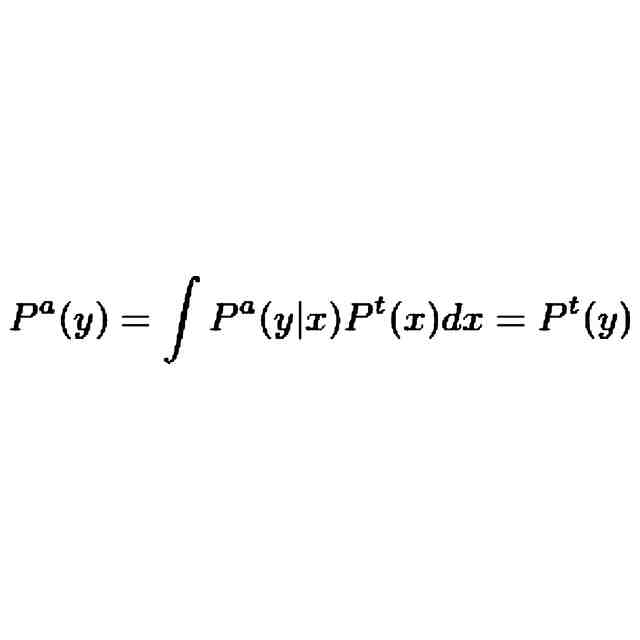
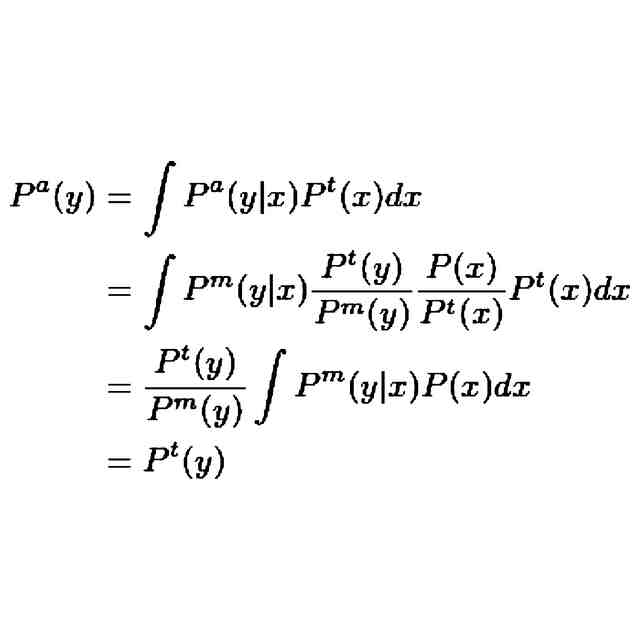
(3):上記(2)の態様において、前記補正部は、前記ハイパーパラメータと、前記機械学習モデルによって定義される周辺分布から算出される、前記クラスのサンプルが発生する事前確率との積によって、前記補正値を算出するものである。
【0009】
(4):上記(1)の態様において、前記推定部は、前記ロジットに前記補正値を加算することによって前記ロジットを補正し、補正した前記ロジットに基づく確率値が最大となるクラスを、前記対象データのうち前記少なくとも一部が該当するクラスとして推定するものである。
【0010】
(5):上記(1)の態様において、前記データは、複数のピクセルを含む画像であり、前記データの少なくとも一部は、前記画像のうちの一以上のピクセル群であるものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ