TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025116024
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2025084847,2021110914
出願日
2025-05-21,2021-07-02
発明の名称
車両制御装置、車両制御プログラム及び車両制御方法
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
主分類
B60W
30/09 20120101AFI20250731BHJP(車両一般)
要約
【課題】車両の空走距離を短くして安全性を向上させる。
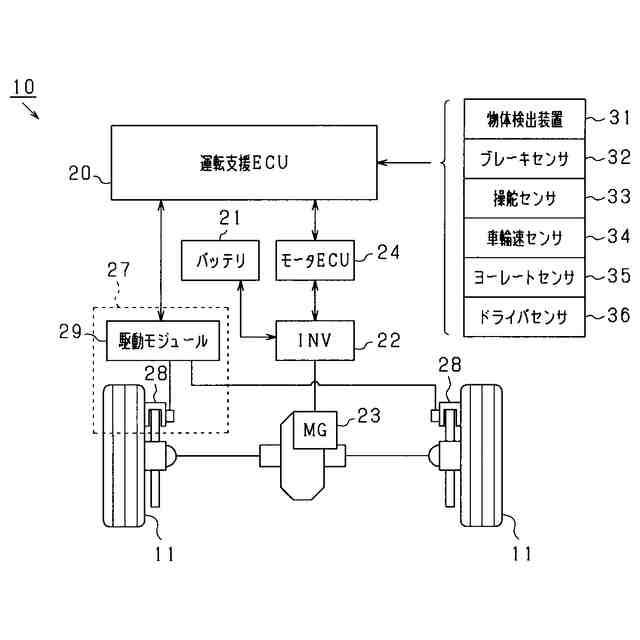
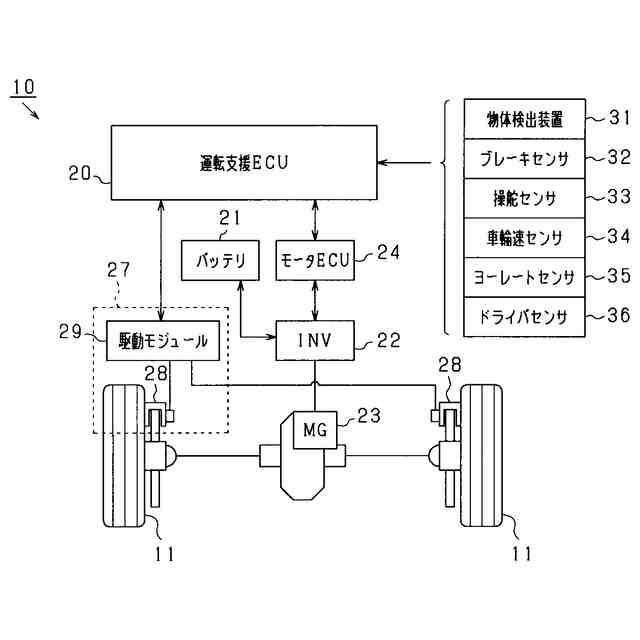
【解決手段】車両10は、ドライバのブレーキ操作によらず制動力を発生可能な制動力発生装置である走行用モータ23及びブレーキ装置27を備えるとともに、車両10の運転支援を行う運転支援ECU20を備えている。運転支援ECU20は、ドライバによりステアリングの急操舵が行われたことを判定し、その判定結果に基づいて、走行用モータ23とブレーキ装置27とを用いて制動力を発生させるべく、走行用モータ23を回生状態に制御するとともに、ブレーキ装置27の作動を指令する。
【選択図】 図1
特許請求の範囲
【請求項1】
ドライバのブレーキ操作によらず制動力を発生可能な制動力発生装置(23,27)を備える車両(10)に適用され、
前記車両において急操舵が行われたことを判定する急操舵判定部と、
前記急操舵が行われたとの判定結果に基づいて、前記制動力発生装置の制御により制動力を生じさせるブレーキ制御部と、
を備える車両制御装置(20)。
続きを表示(約 360 文字)
【請求項2】
ドライバのブレーキ操作によらず制動力を発生可能な制動力発生装置(23,27)を備える車両(10)に適用され、
プロセッサに、
前記車両において急操舵が行われたことを判定する急操舵判定処理と、
前記急操舵が行われたとの判定結果に基づいて、前記制動力発生装置の制御により制動力を生じさせるブレーキ制御処理と、
を実行させる車両制御プログラム。
【請求項3】
ドライバのブレーキ操作によらず制動力を発生可能な制動力発生装置(23,27)を備える車両(10)に適用され、
前記車両において急操舵が行われたことを判定し、
前記急操舵が行われたとの判定結果に基づいて、前記制動力発生装置の制御により制動力を生じさせるブレーキ制御を実行する、車両制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置、車両制御プログラム及び車両制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
走行中の車両に対して小動物等の障害物の急な飛び出しがあった際には、車両において、障害物の飛び出しに応じた対応が行われることが望まれる。例えば特許文献1では、障害物センサによる障害物の検知結果とドライバによるブレーキ操作の状況とに基づいて障害物との衝突を回避できるかを判定し、ドライバのブレーキ操作では衝突を回避できないと判定した場合に、障害物の回避の支援に必要な車両減速度に従って車両側でブレーキ装置を制御する技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特許第5166883号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、車両の走行時には、上記飛び出し等に応じてドライバによりステアリングが急操作(急操舵)されることがある。この場合、ステアリング操作に対してドライバによるブレーキ操作が遅れることがあると考えられ、その際、実際にブレーキが効き始めるまでの距離である空走距離が長くなると想定される。空走距離が長くなることは、障害物の回避等を困難にする要因になると懸念される。このように、車両の空走距離を短くして安全性の向上を図る上で、未だ技術改善の余地がある。
【0005】
本発明は、上記課題に鑑みてなされたものであり、その主たる目的は、車両の空走距離を短くして安全性を向上させることができる車両制御装置、車両制御プログラム及び車両制御方法を提供することにある。
【課題を解決するための手段】
【0006】
以下、上記課題を解決するための手段について記載する。
【0007】
本発明は、ドライバのブレーキ操作によらず制動力を発生可能な制動力発生装置を備える車両に適用され、前記車両において急操舵が行われたことを判定する急操舵判定部と、前記急操舵が行われたとの判定結果に基づいて、前記制動力発生装置の制御により制動力を生じさせるブレーキ制御部とを備える。
【0008】
本発明によれば、ドライバが急操舵を行った場合には、当該急操舵を契機として制動力を生じさせるべく制動力発生装置が制御される。このようにドライバのブレーキ操作を待つことなく速やかに制動力を発生させる構成とすれば、例えば急操舵後のブレーキ操作を契機として制動力が発生する構成と比較して車両の空走距離を短くすることができる。すなわち、ドライバのブレーキ操作の遅れがそのまま制動の遅れに繋がることを抑制できる。これにより、車両の安全性の向上に寄与できる。
【図面の簡単な説明】
【0009】
実施形態における運転支援システムの概略構成を示す図。
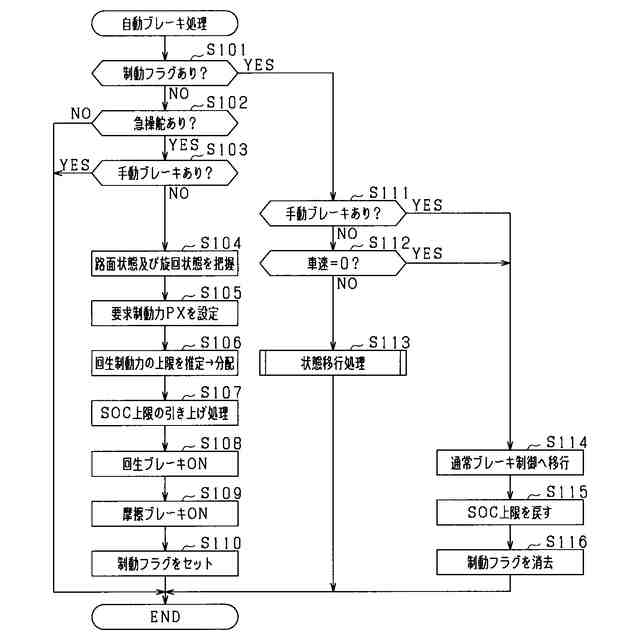
自動ブレーキ処理を示すフローチャート。
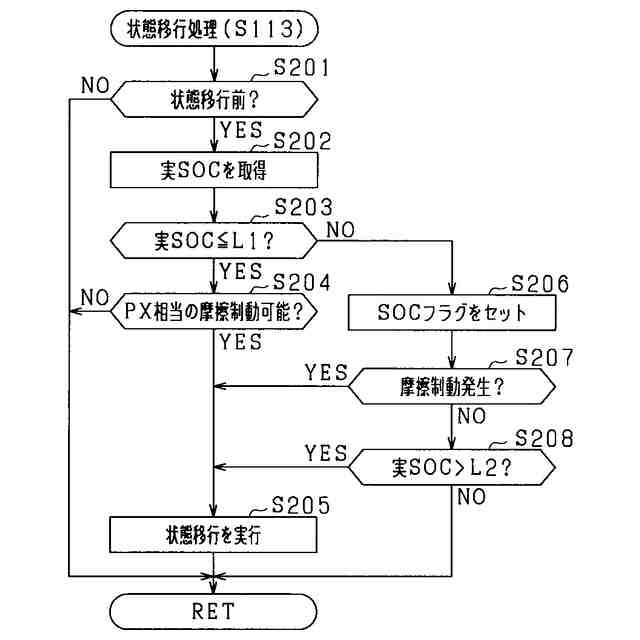
状態移行処理を示すフローチャート。
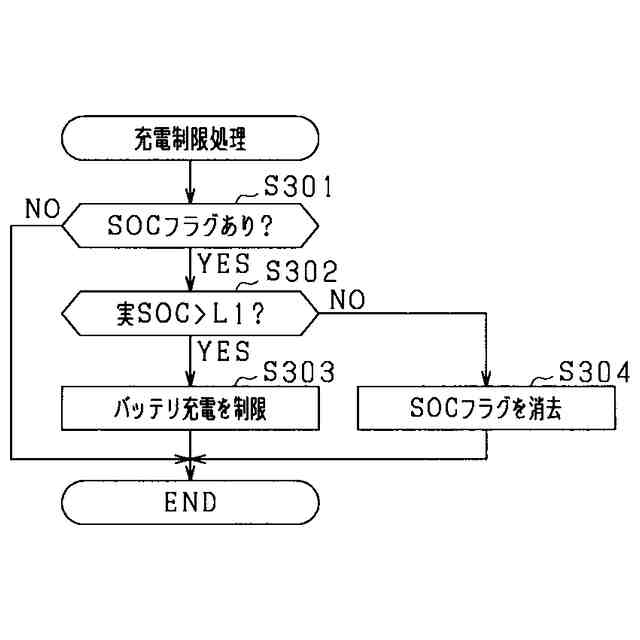
充電制限処理を示すフローチャート。
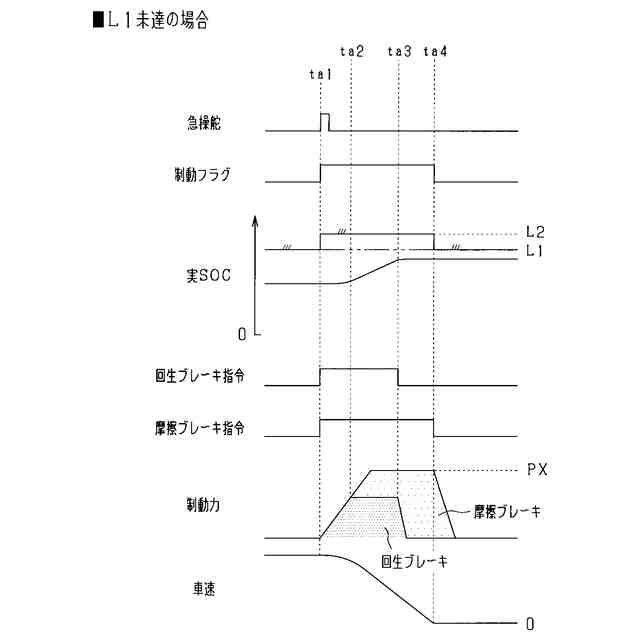
第1上限未達時の自動ブレーキ処理を例示したタイミングチャート。
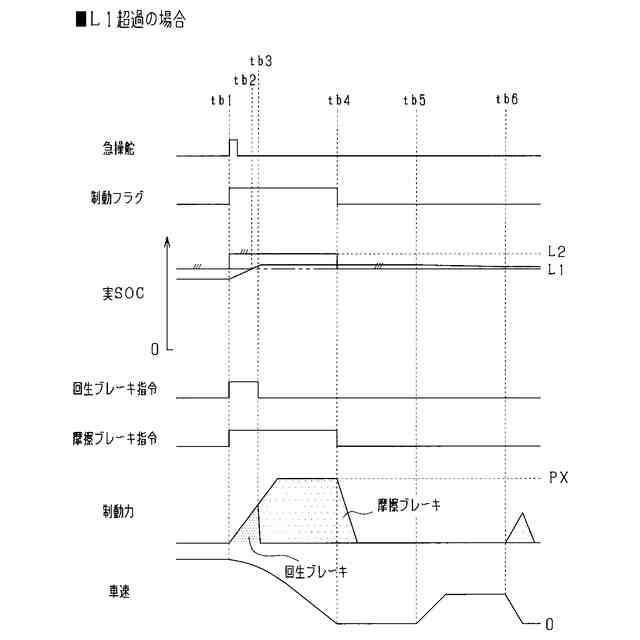
第1上限超過時の自動ブレーキ処理を例示したタイミングチャート。
車両の制動の様子を例示した図。
別例における状態移行処理を示すフローチャート。
別例における制動力の変化を例示したタイミングチャート。
別例における制動力の変化を例示したタイミングチャート。
別例におけるSOC上限の引き上げ処理を示すフローチャート。
別例における自動ブレーキ処理を示すフローチャート。
【発明を実施するための形態】
【0010】
以下、本発明の車両制御装置を具体化した実施形態を図面に基づいて説明する。本実施形態は、電動車両の運転支援システムとして具体化している。まず、図1に基づいて運転支援システムの概略構成を説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ