TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115762
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2024010397
出願日
2024-01-26
発明の名称
ロボットシステム、ロボット制御方法、およびロボット制御プログラム
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20250731BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】現実のロボットの周囲の状況が事前の想定と異なる場合でも該ロボットを適切に動作させること。
【解決手段】ロボットシステムは、現実の作業空間に配置され、エンドエフェクタを移動させるための自由度を有する複数の駆動軸を有するロボットと、エンドエフェクタを指定ポイントに位置させた際のロボットの姿勢であるシミュレーション姿勢を、ロボットを示すロボットモデルに基づくシミュレーションによって仮想的に実行するシミュレーション部と、シミュレーション姿勢とロボットの限界姿勢とから得られる余裕度に基づいて、指定ポイントでの、複数の駆動軸のうちの少なくとも一つの駆動軸の拘束条件を決定する決定部と、拘束条件に基づいてロボットを制御するロボット制御部とを備える。
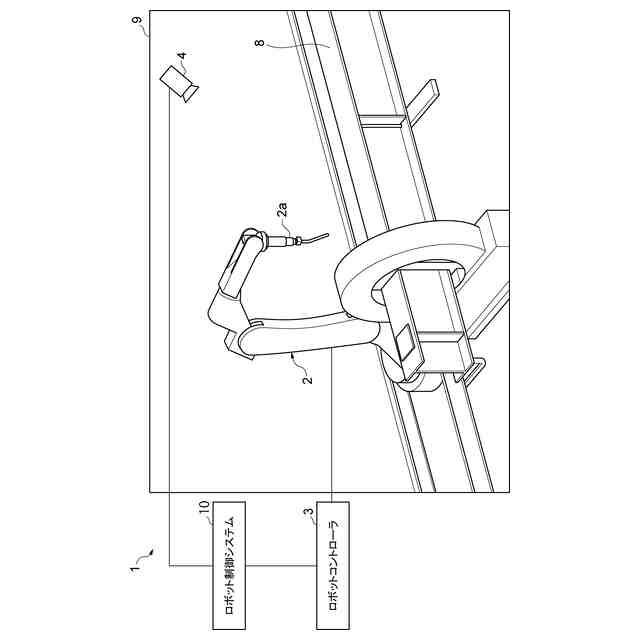
【選択図】図2
特許請求の範囲
【請求項1】
現実の作業空間に配置され、エンドエフェクタを移動させるための自由度を有する複数の駆動軸を有するロボットと、
前記エンドエフェクタを指定ポイントに位置させた際の前記ロボットの姿勢であるシミュレーション姿勢を、前記ロボットを示すロボットモデルに基づくシミュレーションによって仮想的に実行するシミュレーション部と、
前記シミュレーション姿勢と前記ロボットの限界姿勢とから得られる余裕度に基づいて、前記指定ポイントでの、前記複数の駆動軸のうちの少なくとも一つの駆動軸の拘束条件を決定する決定部と、
前記拘束条件に基づいて前記ロボットを制御するロボット制御部と、
を備えるロボットシステム。
続きを表示(約 1,500 文字)
【請求項2】
前記複数の駆動軸は冗長軸を含み、
前記決定部は、前記冗長軸上の一つの位置を前記拘束条件として決定する、
請求項1に記載のロボットシステム。
【請求項3】
前記現実の作業空間に存在するワークの現実の位置をワーク位置として検知するセンサを更に備え、
前記ロボット制御部は、前記拘束条件と前記センサにより検知された前記ワーク位置とに基づいて、前記ワークを処理するように前記ロボットを制御する、
請求項1に記載のロボットシステム。
【請求項4】
前記センサによって検知された前記ワーク位置に基づいて前記指定ポイントを調整する調整部を更に備え、
前記ロボット制御部は、前記調整された指定ポイントに基づいて、前記ワークを処理するように前記ロボットを制御する、
請求項3に記載のロボットシステム。
【請求項5】
前記調整された指定ポイントに前記エンドエフェクタを移動させるためのパスを生成するパス生成部を更に備える請求項4に記載のロボットシステム。
【請求項6】
ワークを処理するためのタスクを記憶するタスク記憶部を更に備え、
前記シミュレーション部は、
前記タスクにおいて前記エンドエフェクタが前記ワークに作用し始める位置である開始位置を前記指定ポイントとして設定し、
前記ロボットが前記シミュレーション姿勢によって前記エンドエフェクタを前記開始位置に位置させて前記ワークを処理する作業場面を、前記シミュレーションによって仮想的に実行し、
前記決定部は、前記エンドエフェクタを前記ワークに作用させるための前記拘束条件を決定する、
請求項1~5のいずれか一項に記載のロボットシステム。
【請求項7】
前記タスク記憶部は、2以上の前記タスクを記憶し、
前記シミュレーション部は、
前記2以上の前記タスクのそれぞれについて前記指定ポイントを設定し、
前記複数の駆動軸のうちの前記少なくとも一つの駆動軸のそれぞれの位置を、前記2以上のタスクの間で同じ位置である共通位置に固定させた状況下で、前記2以上のタスクを含む前記作業場面を仮想的に実行し、
前記決定部は、前記2以上のタスクのそれぞれにおける前記余裕度に基づいて、前記2以上のタスクの間で共通する前記拘束条件を決定する、
請求項6に記載のロボットシステム。
【請求項8】
前記シミュレーション部は、前記冗長軸上に設定された複数の候補位置のそれぞれについて、前記シミュレーション姿勢を仮想的に実行し、
前記決定部は、
前記複数の候補位置のそれぞれでの前記シミュレーション姿勢と前記限界姿勢とに基づいて、前記複数の候補位置のそれぞれについて前記余裕度を算出し、
前記複数の候補位置のそれぞれの前記余裕度に基づいて、前記複数の候補位置のうちの一つを前記拘束条件として決定する、
請求項2に記載のロボットシステム。
【請求項9】
前記ロボットは前記駆動軸として走行軸を有し、
前記冗長軸は前記走行軸である、
請求項2に記載のロボットシステム。
【請求項10】
前記ロボットは垂直多関節ロボットであり、
前記ロボットは前記複数の駆動軸として7以上の駆動軸を有し、
前記冗長軸は前記7以上の駆動軸のうちの一つである、
請求項2に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示の一側面はロボットシステム、ロボット制御方法、およびロボット制御プログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、産業用ロボットに取り付けられたツール姿勢が一つの冗長自由度を持つ場合における産業用ロボットの姿勢生成方法が記載されている。特許文献2には、ロボットアームに対する手首部の手首オフセットによって生じる死角に接近する度合いを示す評価関数を定め、該評価関数の値が常に小さくなるように冗長軸の長さまたは角度を決定し、この決定値を基に他の非冗長軸の長さまたは角度を決定して死角を回避するロボットの制御方法が記載されている。
【先行技術文献】
【特許文献】
【0003】
特許第3902310号公報
特開平05-220681号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
現実のロボットの周囲の状況が事前の想定と異なる場合でも該ロボットを適切に動作させるための仕組みが望まれている。
【課題を解決するための手段】
【0005】
本開示の一側面に係るロボットシステムは、現実の作業空間に配置され、エンドエフェクタを移動させるための自由度を有する複数の駆動軸を有するロボットと、エンドエフェクタを指定ポイントに位置させた際のロボットの姿勢であるシミュレーション姿勢を、ロボットを示すロボットモデルに基づくシミュレーションによって仮想的に実行するシミュレーション部と、シミュレーション姿勢とロボットの限界姿勢とから得られる余裕度に基づいて、指定ポイントでの、複数の駆動軸のうちの少なくとも一つの駆動軸の拘束条件を決定する決定部と、拘束条件に基づいてロボットを制御するロボット制御部とを備える。
【0006】
本開示の一側面に係るロボット制御方法は、現実の作業空間に配置され、エンドエフェクタを移動させるための自由度を有する複数の駆動軸を有するロボットを制御するロボット制御システムであって、少なくとも一つのプロセッサを備える該ロボット制御システムによって実行される。このロボット制御方法は、エンドエフェクタを指定ポイントに位置させた際のロボットの姿勢であるシミュレーション姿勢を、ロボットを示すロボットモデルに基づくシミュレーションによって仮想的に実行するステップと、シミュレーション姿勢とロボットの限界姿勢とから得られる余裕度に基づいて、指定ポイントでの、複数の駆動軸のうちの少なくとも一つの駆動軸の拘束条件を決定するステップと、拘束条件に基づいてロボットを制御するステップとを含む。
【0007】
本開示の一側面に係るロボット制御プログラムは、現実の作業空間に配置され、エンドエフェクタを移動させるための自由度を有する複数の駆動軸を有するロボットを制御するロボット制御システムとしてコンピュータを機能させる。このロボット制御プログラムは、エンドエフェクタを指定ポイントに位置させた際のロボットの姿勢であるシミュレーション姿勢を、ロボットを示すロボットモデルに基づくシミュレーションによって仮想的に実行するステップと、シミュレーション姿勢とロボットの限界姿勢とから得られる余裕度に基づいて、指定ポイントでの、複数の駆動軸のうちの少なくとも一つの駆動軸の拘束条件を決定するステップと、拘束条件に基づいてロボットを制御するステップとをコンピュータに実行させる。
【発明の効果】
【0008】
本開示の一側面によれば、現実のロボットの周囲の状況が事前の想定と異なる場合でも該ロボットを適切に動作させることができる。
【図面の簡単な説明】
【0009】
ロボットシステムの例を示す図である。
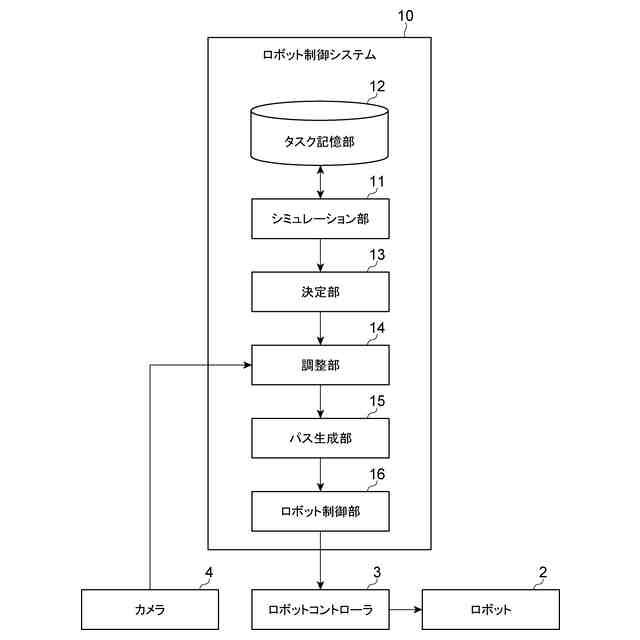
ロボット制御システムの機能構成の例を示す図である。
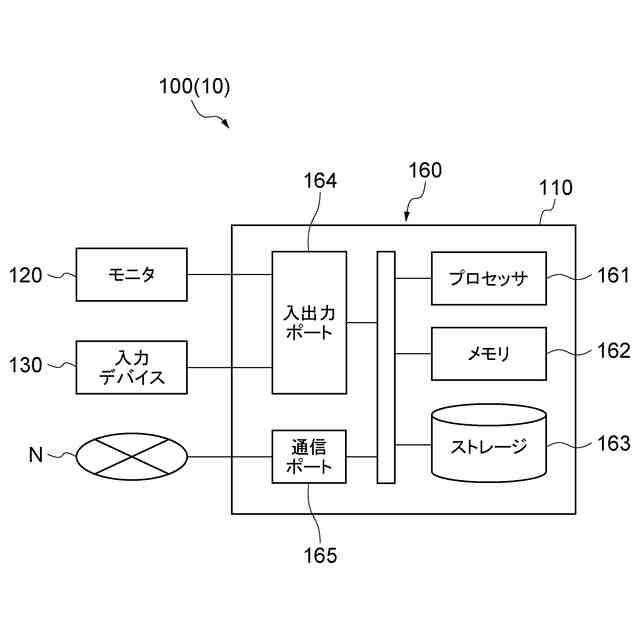
ロボット制御システムのために用いられるコンピュータのハードウェア構成の例を示す図である。
ロボットシステムにより実行される処理の例を示すフローチャートである。
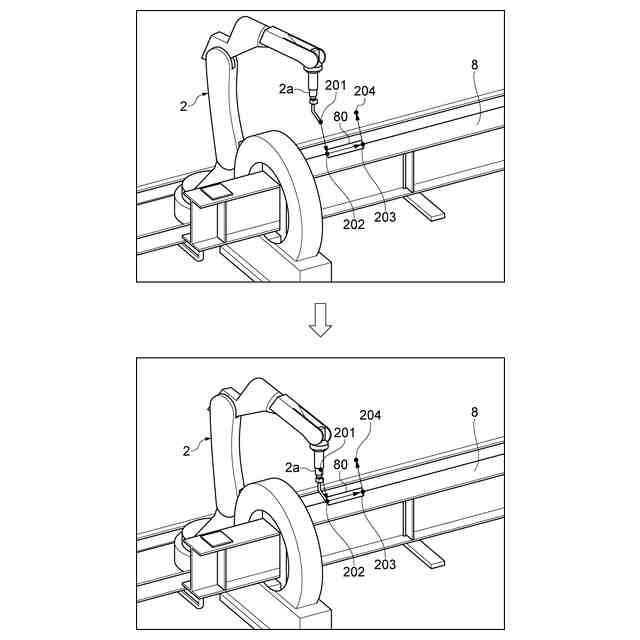
指定ポイントの設定について説明するための図である。
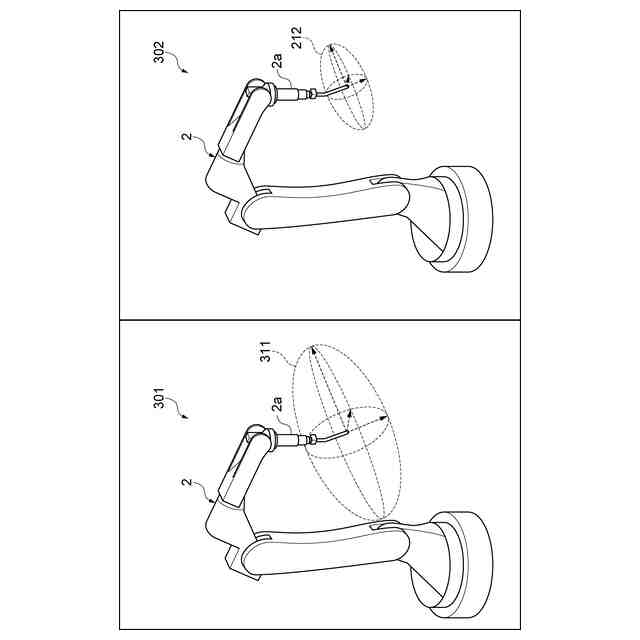
可操作性楕円体の例を示す図である。
2以上のタスクの間で共通する拘束条件を決定する処理を説明するための図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照しながら本開示での様々な例を詳細に説明する。図面の説明において同一または同等の要素には同一の符号を付し、重複する説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ