TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025114497
公報種別
公開特許公報(A)
公開日
2025-08-05
出願番号
2025005453
出願日
2025-01-15
発明の名称
手動駆動往復ポンプ
出願人
朝日インテック株式会社
代理人
個人
主分類
A61B
17/3207 20060101AFI20250729BHJP(医学または獣医学;衛生学)
要約
【課題】手動駆動往復ポンプに関連する様々な組立体、デバイス、構成要素、システム及び方法を提供する。
【解決手段】例示的組立体は、シリンダを含み得、シリンダは、近位端と、遠位端と、近位端と遠位端との間に画定される本体部分とを備える。組立体は、シリンダ内に配設されるピストンを更に備え得る。組立体は、シリンダの遠位端に流体連結される第1の逆止弁と第2の逆止弁とを更に備え得る。組立体は、ピストン機構を更に備え得る。ピストン機構は、回転シャフトと、コネクティング・ロッドを有するクランクとを備え得る。組立体は、反動駆動器を更に備え得る。反動駆動器は、第1の引張りハンドルと、第1の引張りひもと、第1のプーリと、第1の反動ばねとを備え得る。
【選択図】なし
特許請求の範囲
【請求項1】
真空圧力を印加する手動駆動往復ポンプ組立体であって、
近位端、遠位端及び前記近位端と前記遠位端との間に画定される本体部分を備えるシリンダであって、前記近位端及び前記遠位端は、流路を更に画定する、シリンダと、
前記シリンダ内に配設されるピストンと、
前記シリンダの前記遠位端に流体連結される第1の逆止弁及び第2の逆止弁と、
前記第2の逆止弁に接続されるコネクタと、
ピストン機構であって、回転シャフト及びコネクティング・ロッドを有するクランクを備え、前記コネクティング・ロッドは、前記回転シャフトの回転により前記クランクの循環運動を生じさせ、前記シリンダ内で前記ピストンを並進させるようにプランジャに連結される、ピストン機構と、
反動駆動器であって、前記反動駆動器は、第1の引張りひもに接続される第1の引張りハンドルであって、前記第1の引張りひもは、第1のプーリの周囲に巻き付けられる、第1の引張りハンドルと、前記第1のプーリに連結される第1の反動ばねとを備え、前記第1のプーリは、前記第1の引張りハンドルの作動に応じて前記ピストン機構の前記回転シャフトを回転させるように構成される、反動駆動器と、を備え、
前記手動駆動往復ポンプ組立体は、力が前記第1の引張りハンドルに印加された際に前記第2の逆止弁を通じて真空圧力を生成し、前記ピストンを前記流路に沿って並進させるように構成される、手動駆動往復ポンプ組立体。
続きを表示(約 1,700 文字)
【請求項2】
取入れ弁を備えるウォーター・トラップを更に備え、
前記ウォーター・トラップは、
前記コネクタに接続し、
前記ウォーター・トラップの内部の空気を排出し、前記カテーテルに陰圧を印加し、前記ウォーター・トラップが空気又は流体の少なくとも一方を受け入れるように構成される、請求項1に記載の手動駆動往復ポンプ組立体。
【請求項3】
前記ウォーター・トラップは、前記手動駆動往復ポンプ組立体が再使用可能となるように、着脱可能に構成される、請求項2に記載の手動駆動往復ポンプ組立体。
【請求項4】
第1のラチェット機構を更に備え、
前記第1のラチェット機構は、
前記第1のプーリの第1の回転方向で前記第1のプーリを前記ピストン機構の前記回転シャフトに連結し、
前記第1のプーリの第2の回転方向で前記回転シャフトから前記第1のプーリを分離するように構成される、請求項1に記載の手動駆動往復ポンプ組立体。
【請求項5】
前記第1の引張りハンドルに印加される前記力は、前記第1のプーリにより前記ピストン機構の前記回転シャフトを回転させるように構成され、
前記ピストン機構の前記回転は、前記ピストンを前記シリンダの本体部分内で並進させるように構成され、
前記シリンダの前記本体部分内での前記ピストンの前記並進は、前記シリンダの前記遠位端を通じて真空圧力を印加するように構成される、請求項4に記載の手動駆動往復ポンプ組立体。
【請求項6】
前記第1の反動ばねは、前記第1のラチェット機構を前記ピストン機構の前記回転シャフトから分離させ、前記第1の引張りハンドルを最初の位置に戻すように構成される、請求項5に記載の手動駆動往復ポンプ組立体。
【請求項7】
少なくとも1回の更なる引張り力の印加に応じて、前記第1の引張りハンドルは、ウォーター・トラップ内に標的真空圧力を生成し、空気又は流体の少なくとも一方を前記シリンダの前記本体部分の流路を通じて流すように構成される、請求項6に記載の手動駆動往復ポンプ組立体。
【請求項8】
前記反動駆動器は、第2の引張りひもに接続される第2の引張りハンドルを更に備え、
前記第2の引張りひもは、第2のプーリの周囲に巻き付けられ、
前記反動駆動器は、前記第2のプーリに連結される第2の反動ばねを更に備え、
前記第2のプーリは、前記第2の引張りハンドルの作動に応じて前記ピストン機構の前記回転シャフトを回転させるように構成される、請求項1に記載の手動駆動往復ポンプ組立体。
【請求項9】
前記第1のプーリの直径は、前記第2のプーリの直径より小さく、
前記第1のプーリは、ウォーター・トラップに第1の真空圧力を印加するように構成され、
前記第2のプーリは、前記ウォーター・トラップに第2の真空圧力を印加するように構成され、
前記第2の真空圧力は、前記第1の真空圧力より大きい、請求項8に記載の手動駆動往復ポンプ組立体。
【請求項10】
第1のラチェット機構と第2のラチェット機構とを更に備え、
前記第1のラチェット機構は、
前記第1のプーリの第1の方向での回転に応じて前記第1のプーリを前記ピストン機構の前記回転シャフトに連結し、
前記第1のプーリの第2の方向での回転に応じて前記第1のプーリを前記ピストン機構の前記回転シャフトから分離するように構成され、
前記第2のラチェット機構は、
前記第1のプーリ又は前記第2のプーリの少なくとも一方の前記第1の方向での回転に応じて前記第2のプーリを前記ピストン機構の前記回転シャフトから分離し、
前記第1のプーリ又は前記第2のプーリの少なくとも一方の前記第2の方向での回転に応じて前記第2のプーリを前記ピストン機構の前記回転シャフトに連結するように構成される、請求項9に記載の手動駆動往復ポンプ組立体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、真空圧力を印加可能な手動駆動往復ポンプ組立体に関する。例えば、例示的実施形態は、血栓切除等の医療用途で使用するための手動駆動往復ポンプ組立体に関する。
(関連出願の相互参照)
本願は、2024年1月24日出願、「MANUALLY DRIVEN RECIP
ROCAL PUMP」という名称の米国仮出願第63/624,470号に対する利益及び優先権を主張し、当該出願の開示は、その全体が参照によって本明細書内に組み込まれる。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
様々な医療処置において、医療処置の一部として真空圧力が印加される。例えば、血栓切除の間、真空陰圧を使用し、患者の血管系から血栓を除去する。真空圧力を短い時間量の間だけ印加する場合、30ml又は60mLのシリンジ・ポンプを使用することがある。しかし、かなり短い時間量を超えて真空力を印加する場合、このシリンジ・ポンプの体積部は、必要な時間期間にわたって安定した真空力を生成するには不十分である。したがって、安定した圧力を容易に、より効果的に生成可能であるデバイス及び組立体の必要性がある。労力、創意及び刷新を加えたことにより、本出願人は、以下に詳細に記載する本開示で実現される解決策の開発によって、医療真空ポンプ、並びに関連するシステム、組立体、構成要素及び方法に関連する問題を解決した。
【発明の概要】
【0003】
本開示の様々な実施形態は、シリンダ、ピストン、反動駆動器、組立体、ポンプ組立体、並びに手動駆動往復ポンプ組立体に関連する対応するシステム、機構、デバイス、構成要素、及び方法を含む。
【0004】
本開示の様々な実施形態は、組立体を含み得る。例示的手動駆動往復ポンプ組立体は、近位端、遠位端、近位端と遠位端との間に画定される本体部分を備えるシリンダであって、近位端及び遠位端は、流路を更に画定する、シリンダと、シリンダ内に配設されるピストンと、シリンダの遠位端に流体連結される第1の逆止弁及び第2の逆止弁と、第2の逆止弁に接続されるコネクタと、ピストン機構であって、ピストン機構は、回転シャフト及びコネクティング・ロッドを有するクランクを備え、コネクティング・ロッドは、回転シャフトの回転がクランクの循環運動を生じさせるようにプランジャに連結され、シリンダ内でピストンを並進させる、ピストン機構と、反動駆動器とを含み得、反動駆動器は、第1のプーリの周囲に巻き付けられる第1の引張りひもに接続される第1の引張りハンドルと、第1のプーリに連結される第1の反動ばねとを備え、第1のプーリは、第1の引張りハンドルの作動に応じてピストン機構の回転シャフトを回転させるように構成され、手動駆動往復ポンプ組立体は、力が第1の引張りハンドルに印加された際に第2の逆止弁を通じて真空圧力を生成し、ピストンを流路に沿って並進させるように構成される。
【0005】
上記の概要は、本開示のいくつかの態様に対する基本的な理解を提供するため、いくつかの例示的実施形態を要約する目的で提供されるにすぎない。したがって、上記の実施形態は、例にすぎず、本開示の範囲又は趣旨を狭めるものと決して解釈すべきではないことを了解されたい。本開示の範囲は、本明細書で要約される実施形態に加えて、多数の可能な実施形態を包含し、これらの実施形態の一部を以下で更に説明することを了解されたい。主題の他の特徴、態様及び利点は、本明細書、図面及び特許請求の範囲から明らかになるであろう。
【0006】
以下の図面は、本開示の特定の実施形態の説明図であり、これらの実施形態は、本開示の範囲を限定するものではない。図面は、必ずしも一定の縮尺で描かれておらず、以下の詳細な説明の説明と併せて使用することが意図される。
【図面の簡単な説明】
【0007】
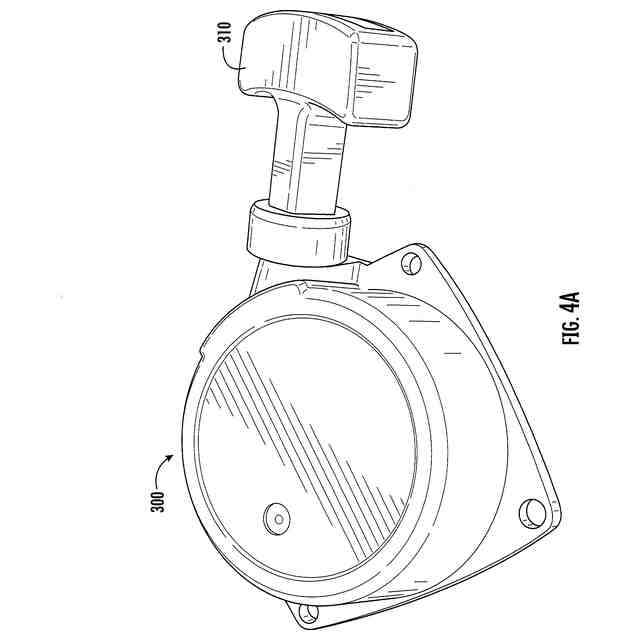
本開示の様々な実施形態による手動駆動往復ポンプ組立体の斜視図である。
本開示の様々な実施形態による、ウォーター・トラップを有する手動駆動往復ポンプ組立体の斜視図である。
本開示の様々な実施形態による手動駆動往復ポンプ組立体の斜視図である。
本開示の様々な実施形態による手動駆動往復ポンプ組立体の斜視図である。
本開示の様々な実施形態によるピストン機構の斜視図である。
本開示の様々な実施形態によるピストン機構の底面斜視図である。
本開示の様々な実施形態によるピストン機構の側面斜視図である。
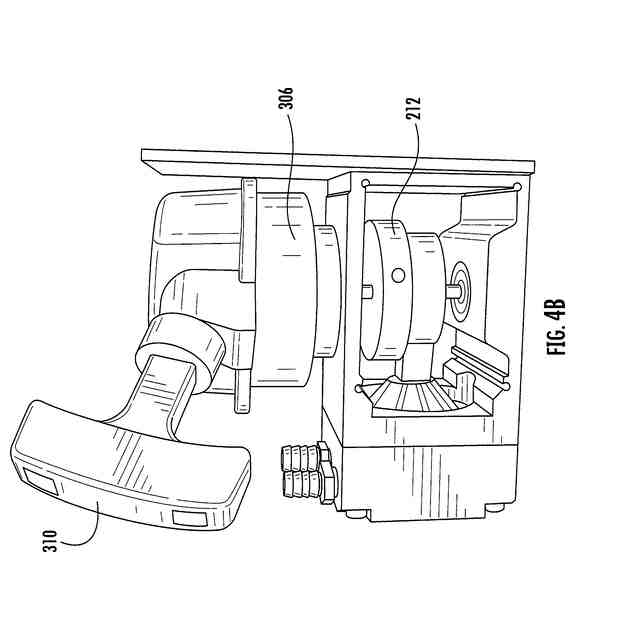
本開示の様々な実施形態による手動駆動往復ポンプ組立体の反動駆動器の斜視図である。
本開示の様々な実施形態による単一プーリを有する手動駆動往復ポンプ組立体の斜視図である。
本開示の様々な実施形態による手動駆動往復ポンプ組立体の反動駆動器の一部分の斜視図である。
本開示の様々な実施形態による手動駆動往復ポンプ組立体のプーリの斜視図である。
本開示の様々な実施形態によるラチェット機構の斜視図である。
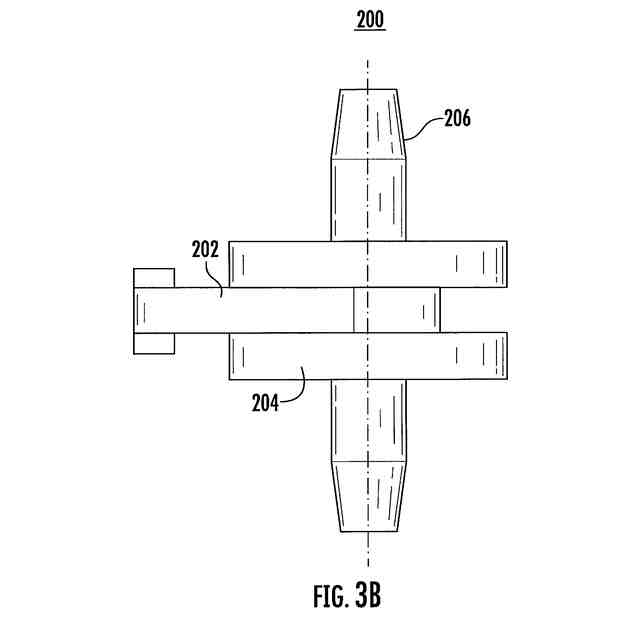
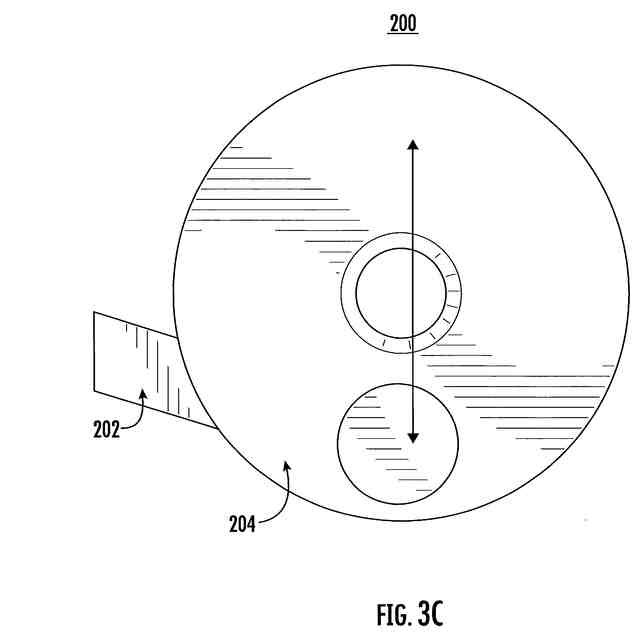
本開示の様々な実施形態によるシリンダの斜視図である。
本開示の様々な実施形態によるシリンダの斜視図である。
本開示の様々な実施形態によるシリンダに取り付けられた逆止弁機構の斜視図である。
本開示の様々な実施形態による逆止弁の一部分の斜視図である。
本開示の様々な実施形態による逆止弁の一部分の斜視図である。
本開示の様々な実施形態による逆止弁の一部分の斜視図である。
本開示の様々な実施形態による操作の例示的方法のフローチャートである。
【発明を実施するための形態】
【0008】
以下、本発明のいくつかの実施形態を示す添付の図面を参照しながら本開示のいくつかの実施形態をより詳細に説明する。参照番号は、図面全体を通じた要素を指す。本発明の複数の実施形態は、様々な形態で具体化することができ、本明細書で示す実施形態に限定すべきではない。むしろ、これらの実施形態は、本開示が適用可能な法的要件を満たすように提供される。
【0009】
本明細書で使用される、「前」、「後」、「上」等の用語は、以下で提供する例における説明の目的で、いくつかの構成要素又は構成要素の部分の、他の構成要素又は構成要素の部分に対する相対的な位置を表すために使用される。本明細書で使用される用語「又は」は、別段に指摘がない限り、代替的及び接続的な意味の両方で使用される。用語「に沿って」及び同様に使用される用語は、縁部又は参照される他の場所の付近又はその上にあることを意味するが、必ずしも、縁部又は参照される他の場所の上に直接あることを必要としない。用語「約」、「概して」、及び「実質的に」は、別段に指摘がない限り、対応する材料及び/又は要素に対する製造及び/又は工学設計許容誤差の範囲内を指す。そのような用語の使用は、包括的であり、列挙される特定の値を独立して請求可能にすることを意図する。したがって、任意のそのような上述の用語又は同様に交換可能な用語は、本発明の実施形態の趣旨及び範囲の限定であると解釈すべきではない。
【0010】
本明細書及び添付の特許請求の範囲で使用される。単数形「1つ(a、an及びthe)」は、別段に指摘がない限り、複数の指示対象を含む。用語「含む(includes及び/又はincluding)」は、本明細書で使用される際、述べられた特徴、要素及び/若しくは構成要素並びに/又はそれらの群の存在を規定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ