TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112372
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024006553
出願日
2024-01-19
発明の名称
搬送装置及びウェーハ収納容器洗浄装置
出願人
芝浦メカトロニクス株式会社
代理人
弁理士法人虎ノ門知的財産事務所
主分類
H01L
21/677 20060101AFI20250725BHJP(基本的電気素子)
要約
【課題】処理を効率よく行う搬送装置及びウェーハ収納容器洗浄装置を提供する。
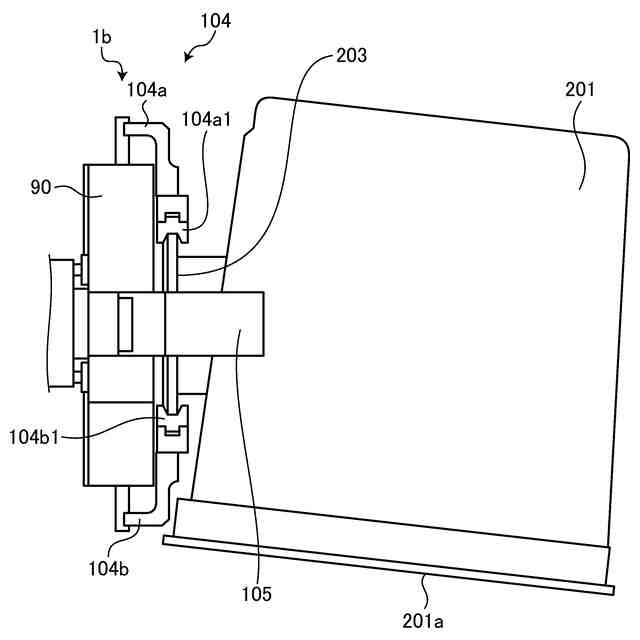
【解決手段】、ウェーハ収納容器の本体201を、位置決め部材を有する載置台に搬送する搬送ロボットを備える搬送装置であって、搬送ロボットは、本体を把持する把持部104を備え、把持部は、本体のフランジ203を把持する一対の本体把持爪104a1、b1及び本体の、フランジとは異なる箇所に接触する支持部材を有し、本体の載置対象面201aは、フランジが設けられる面と交差する面であり、支持部材は、本体把持爪によりフランジが把持され、本体の載置対象面が下方に向けられた状態で、本体が載置台の載置面に対して、載置面に載置される前の本体の載置対象面が、位置決め部材を介して載置可能な姿勢となるように本体を支持するように設けられ、搬送ロボットは、本体把持爪によりフランジを把持し、かつ、支持部材により本体を支持した状態で、本体を載置台に搬送する。
【選択図】図8
特許請求の範囲
【請求項1】
ウェーハ収納容器の本体を、位置決め部材を有する載置台に搬送する搬送ロボットを備える搬送装置であって、
前記搬送ロボットは、
前記本体を把持する把持部を備え、
前記把持部は、前記本体のフランジを把持する一対の本体把持爪と、前記本体における前記フランジとは異なる箇所に接触可能な支持部材とを有し、
前記本体の載置対象面は、前記フランジが設けられる面と交差する面であり、
前記支持部材は、前記本体把持爪により前記フランジが把持され、前記本体の前記載置対象面が下方に向けられた状態で、前記本体が前記載置台の載置面に対して、前記載置面に載置される前の前記本体の前記載置対象面が前記位置決め部材を介して載置可能な姿勢となるように、前記本体を支持するように設けられ、
前記搬送ロボットは、前記本体把持爪により前記フランジが把持され、かつ、前記支持部材により前記本体が支持された状態で、前記本体を前記載置台に搬送する、
搬送装置。
続きを表示(約 700 文字)
【請求項2】
前記把持部は、更に、前記ウェーハ収納容器のドアを一対の把持爪で把持するドア把持爪を有し、
前記支持部材は、前記ドア把持爪により前記ドアが把持された状態では、前記ドアに接触せずに、前記本体把持爪により前記本体の前記フランジが把持された状態では、前記本体に接触して支持するように前記把持部に設けられている、
請求項1に記載の搬送装置。
【請求項3】
前記支持部材は、前記本体の前記載置対象面を有する開口部の縁に当接することにより前記本体を支持する、
請求項1に記載の搬送装置。
【請求項4】
前記支持部材は、前記本体把持爪により前記本体を把持している状態で、前記支持部材の下端が前記本体の下端よりも下方に位置するように、設けられる、
請求項1に記載の搬送装置。
【請求項5】
前記支持部材は、取付板と、前記取付板を介して前記把持部に取り付けられ、前記把持部から前記本体把持爪により把持される前記本体側へ延びる支持部材本体とを備え、
前記支持部材本体の長さは、前記本体把持爪で前記本体を把持して持ち上げたときに、前記載置対象面が前記載置台に載置可能な姿勢であるときには前記本体に当接しない長さであることを特徴とする請求項3に記載の搬送装置。
【請求項6】
請求項1~5のいずれか1つに記載の搬送装置と、
前記載置台を有し、前記載置台の前記載置面に前記本体が載置された状態で前記本体を洗浄する洗浄ノズルを有する洗浄槽と、
を備える、ウェーハ収納容器洗浄装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、搬送装置及びウェーハ収納容器洗浄装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
FOUP(Front Opening Unified Pod)などのウェーハ収納容器は、様々な処理工程(例えば、レジスト塗布、露光・現像、エッチング(成膜)、レジスト剥離、洗浄など)を経て半導体素子が形成されるウェーハを、処理工程間で移動させる際に用いられる。ウェーハ収納容器は、ウェーハをウェーハ収納容器内に保持した状態でロボットにより搬送される。
【0003】
ウェーハ収納容器は、ウェーハ収納容器本体(以下、単に「本体」ともいう)及びドアを備え、本体にはロボットにより把持されるフランジが設けられている。ロボットハンドが、フランジを介して、本体の開口部(ウェーハ収納容器のドアが装着される側)が下方を向く方向で本体を保持した場合、フランジの一部が撓むことにより、本体がフランジの、ロボットハンドによって保持されている付近を支点として下方に垂れることがある。この場合、ロボットがフランジを把持した際に、本体の下端となる部分が水平面に対して傾斜する。このように本体が傾斜した状態で、ロボットが本体を略水平なステージ等に載置するべく搬送すると、本体の下端となる部分と、ステージ等に設けられた位置決めピンとが合致せず、本体を載置することが困難である。
【0004】
上述したような場合には処理を中断してウェーハ収納容器をアンロードすることになり、処理の効率が悪いという問題がある。
【先行技術文献】
【特許文献】
【0005】
特開2005-109523号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、上記のような課題を解決するためになされたものであり、その目的は、処理を効率よく行うことができる搬送装置及びウェーハ収納容器洗浄装置を提供することにある。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するため、本発明の一態様に係る搬送装置は、ウェーハ収納容器の本体を、位置決め部材を有する載置台に搬送する搬送ロボットを備える搬送装置であって、前記搬送ロボットは、前記本体を把持する把持部を備え、前記把持部は、前記本体のフランジを把持する一対の本体把持爪と、前記本体における前記フランジとは異なる箇所に接触可能な支持部材とを有し、前記本体の載置対象面は、前記フランジが設けられる面と交差する面であり、前記支持部材は、前記本体把持爪により前記フランジが把持され、前記本体の前記載置対象面が下方に向けられた状態で、前記本体が前記載置台の載置面に対して、前記載置面に載置される前の前記本体の前記載置対象面が前記位置決め部材を介して載置可能な姿勢となるように、前記本体を支持するように設けられ、前記搬送ロボットは、前記本体把持爪により前記フランジが把持され、かつ、前記支持部材により前記本体が支持された状態で、前記本体を前記載置台に搬送する。
【0008】
また、上述した課題を解決し、目的を達成するため、本発明の一態様に係るウェーハ収納容器洗浄装置は、上述した本発明の一態様に係る搬送装置と、前記載置台を有し、前記載置台の前記載置面に前記本体が載置された状態で前記本体を洗浄する洗浄ノズルを有する洗浄槽と、を備える。
【発明の効果】
【0009】
本発明の一態様によれば、処理を効率良く行うことができる搬送装置及びウェーハ収納容器洗浄装置を提供することができる。
【図面の簡単な説明】
【0010】
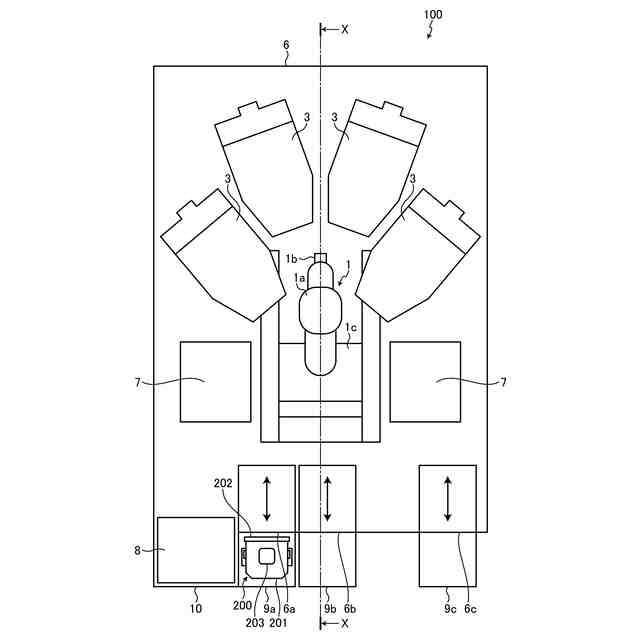
図1は、第1の実施形態に係るウェーハ収納容器洗浄装置の概略構成の一例を示す平面図である。
図2は、第1の実施形態に係るウェーハ収納容器洗浄装置のX-X線断面図である。
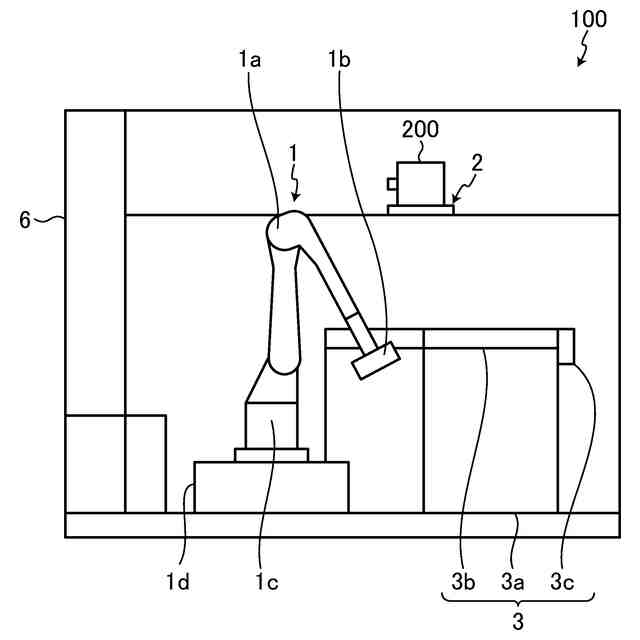
図3は、第1の実施形態に係る搬送ロボットの構成の一例を示す模式図である。
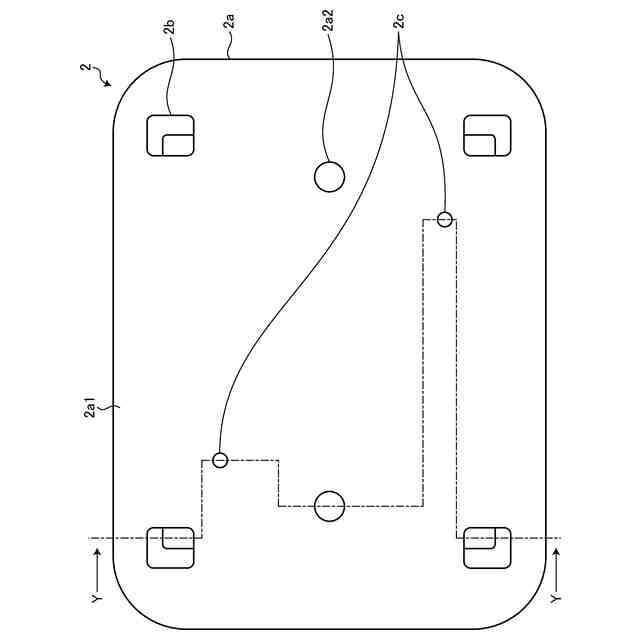
図4は、第1の実施形態に係る分解/連結ステージの一例を示す平面図である。
図5は、図4におけるY-Y線断面図(側面断面図)である。
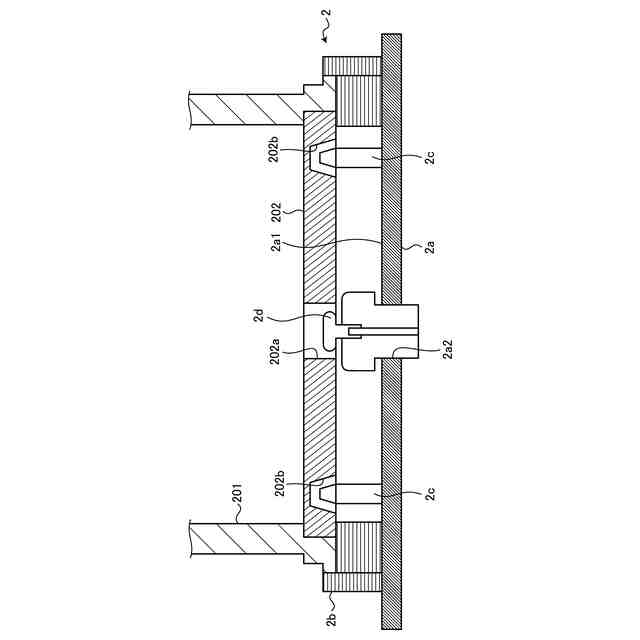
図6は、第1の実施形態に係る洗浄槽に設けられた回転テーブル(載置台)の一例を示す平面図である。
図7は、第1の実施形態に係る回転テーブルの側面の一部を示す図である。
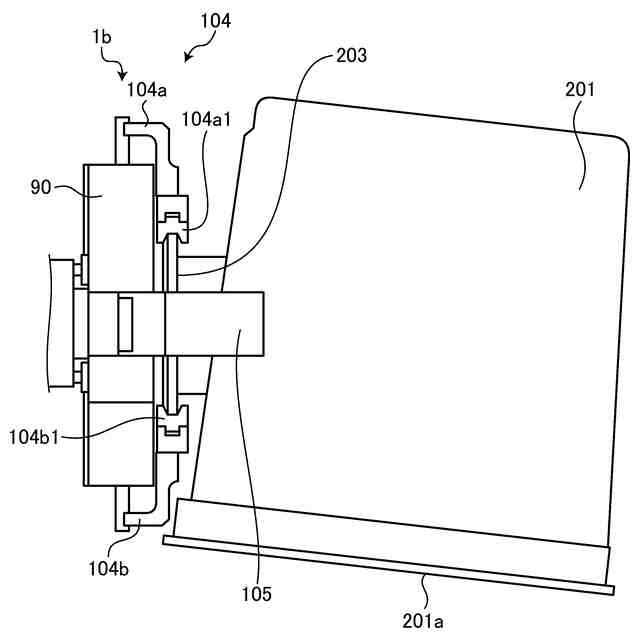
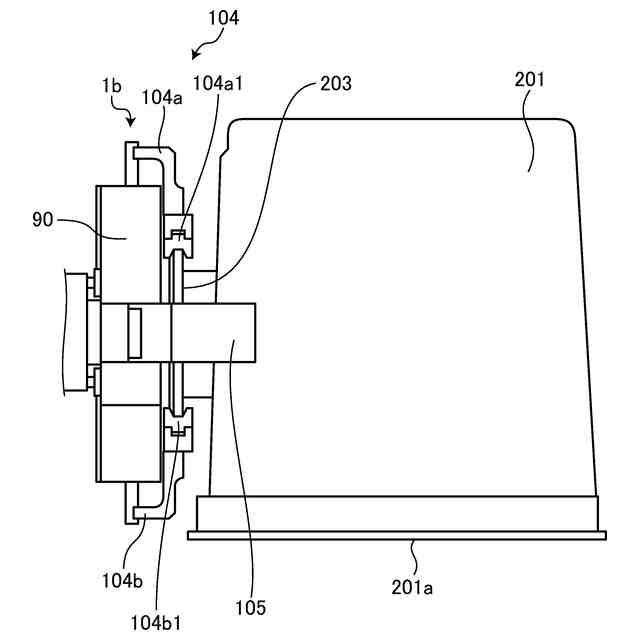
図8は、第1の実施形態に係るロボットハンドが、支持部材が設けられていない場合に、フランジを把持し、本体を持ち上げた状態の一例を示す図である。
図9は、第1の実施形態に係るロボットハンドが、支持部材が設けられていない場合に、フランジを把持し、本体を持ち上げていない状態の一例を示す図である。
図10は、第1の実施形態に係る支持部材の一例の側面図である。
図11は、第1の実施形態に係る支持部材と本体との接触部分の拡大図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ