TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025110594
公報種別
公開特許公報(A)
公開日
2025-07-29
出願番号
2024004516
出願日
2024-01-16
発明の名称
車両制御装置、車両制御用コンピュータプログラム及び車両制御方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/085 20120101AFI20250722BHJP(車両一般)
要約
【課題】狭路区間において、対向車両に対する前方車両の対応に基づいて、自車両の走行を優先するかという判定を的確に行える車両制御装置を提供する。
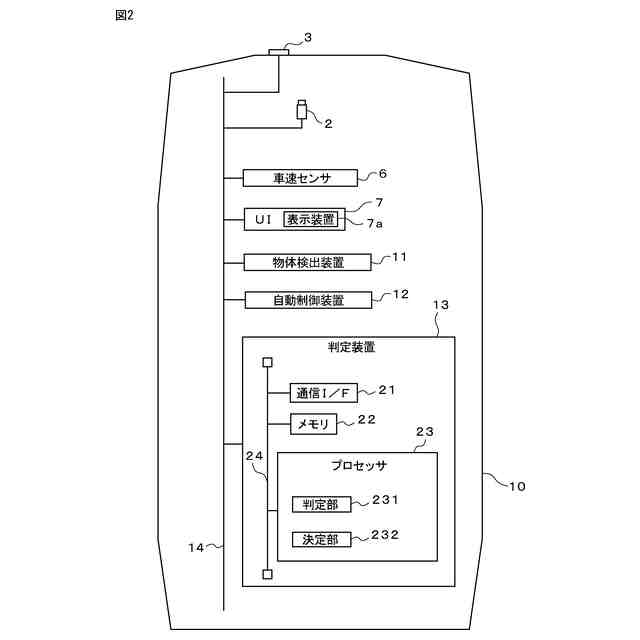
【解決手段】車両制御装置は、自車両の走行方向に向かった所定の範囲に、自車両の前方を走行する前方車両及び自車両と対向して走行する対向車両があるか否かを判定する第1判定部と、前方車両と対向車両との間に、自車両と対向車両とがすれ違って走行することが困難な狭路区間があるか否かを判定する第2判定部と、対向車両に対する前方車両の対応に基づいて、自車両が対向車両よりも先に狭路区間へ進入可能か否かを判定する第3判定部と、第3判定部によって、自車両が対向車両よりも先に狭路区間へ進入可能であると判定された場合、自車両が対向車両よりも先に狭路区間へ進入することを決定する決定部と、を有する。
【選択図】図2
特許請求の範囲
【請求項1】
自車両の走行方向に向かった所定の範囲に、自車両の前方を走行する前方車両及び自車両と対向して走行する対向車両があるか否かを判定する第1判定部と、
前記第1判定部によって前方車両及び対向車両があると判定された場合、前方車両と対向車両との間に、自車両と対向車両とがすれ違って走行することが困難な狭路区間があるか否かを判定する第2判定部と、
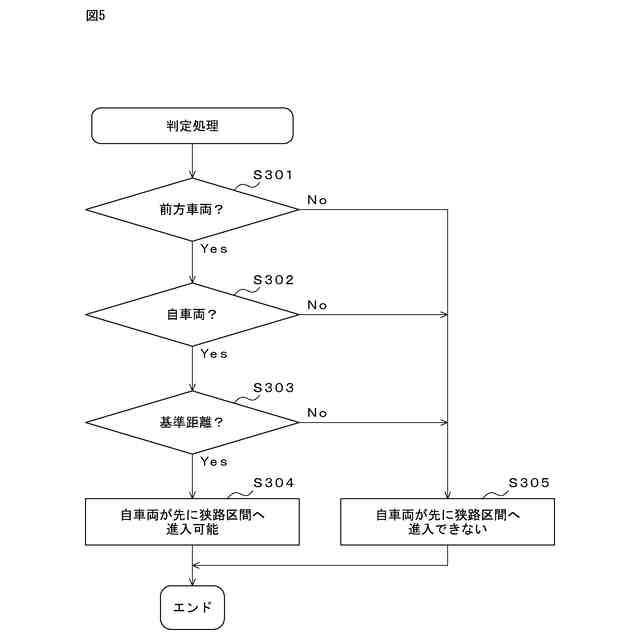
前記第2判定部によって前記狭路区間があると判定された場合、対向車両に対する前方車両の対応に基づいて、自車両が対向車両よりも先に前記狭路区間へ進入可能か否かを判定する第3判定部と、
前記第3判定部によって、自車両が対向車両よりも先に前記狭路区間へ進入可能であると判定された場合、自車両が対向車両よりも先に前記狭路区間へ進入することを決定する決定部と、
を有する、ことを特徴とする車両制御装置。
続きを表示(約 1,900 文字)
【請求項2】
前記第3判定部は、前方車両が対向車両よりも先に前記狭路区間に到達し且つ前方車両が前記狭路区間を通過するまでに自車両が前記狭路区間に進入可能か否かを判定し、
前記第3判定部によって、前方車両が対向車両よりも先に前記狭路区間に到達し且つ前方車両が前記狭路区間を通過するまでに自車両が前記狭路区間に進入可能であると判定された場合、前記決定部は、自車両が対向車両よりも先に前記狭路区間へ進入することを決定する、請求項1に記載の車両制御装置。
【請求項3】
前記第3判定部は、前方車両が対向車両よりも先に前記狭路区間に到達し且つ前記狭路区間を通過した前方車両が対向車両の横を通過するまでに自車両が前記狭路区間に進入可能か否かを判定し、
前記第3判定部によって、前方車両が対向車両よりも先に前記狭路区間を通過し且つ前記狭路区間を通過した前方車両が対向車両の横を通過するまでに自車両が前記狭路区間に進入可能であると判定された場合、前記決定部は、自車両が対向車両よりも先に前記狭路区間へ進入可能であると決定する、請求項1に記載の車両制御装置。
【請求項4】
前記第3判定部は、前方車両が対向車両よりも先に前記狭路区間に到達し且つ前方車両が前記狭路区間を通過するまでに自車両が前記狭路区間に進入可能であり且つ前方車両と自車両との距離が所定の基準距離よりも短いか否かを判定し、
前記第3判定部によって、前方車両が対向車両よりも先に前記狭路区間を通過し且つ前記狭路区間を通過した前方車両が対向車両の横を通過するまでに自車両が前記狭路区間に進入可能であり且つ前方車両と自車両との距離が所定の基準距離よりも短いと判定された場合、前記決定部は、自車両が対向車両よりも先に前記狭路区間へ進入可能であると決定する、請求項1に記載の車両制御装置。
【請求項5】
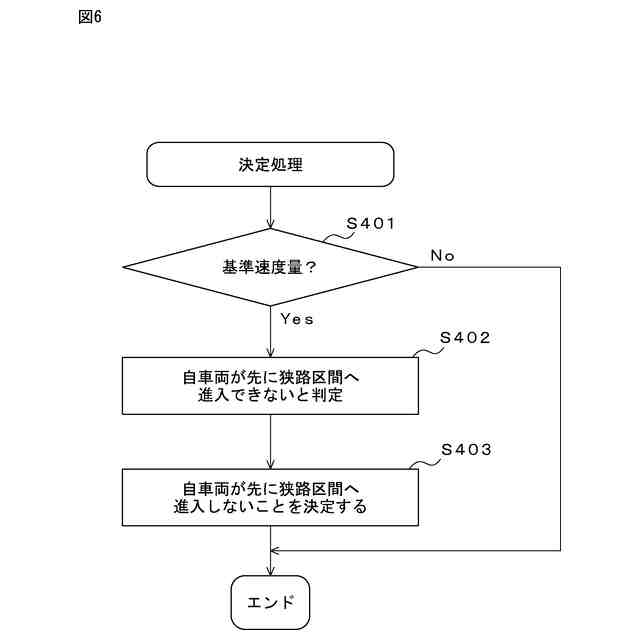
前記決定部によって、自車両が対向車両よりも先に前記狭路区間へ進入可能であると決定された後、前方車両が所定の基準速度量を超える減速を行ったか否かを判定する第4判定部と、
前記第4判定部によって、前方車両が所定の基準速度量を超える減速を行ったと判定された場合、自車両が対向車両よりも先に前記狭路区間へ進入可能ではないと判定する第5判定部と、
を更に有し、
前記第5判定部によって、自車両が対向車両よりも先に前記狭路区間へ進入可能ではないと判定された場合、前記決定部は、自車両が対向車両よりも先に前記狭路区間へ進入可能であるという決定を取り消して、自車両が対向車両よりも先に前記狭路区間へ進入しないことを決定する、請求項1~4の何れか一項に記載の車両制御装置。
【請求項6】
前記第4判定部は、前記決定部によって、自車両が対向車両よりも先に前記狭路区間へ進入可能であると決定された後、前方車両が狭路区間を走行している時に、前方車両が所定の基準速度量を超える減速を行ったか否かを判定する、請求項5に記載の車両制御装置。
【請求項7】
自車両の走行方向に向かった所定の範囲に、自車両の前方を走行する前方車両及び自車両と対向して走行する対向車両があるか否かを判定し、
前方車両及び対向車両があると判定された場合、前方車両と対向車両との間に、自車両と対向車両とがすれ違って走行することが困難な狭路区間があるか否かを判定し、
前記狭路区間があると判定された場合、対向車両に対する前方車両の対応に基づいて、自車両が対向車両よりも先に前記狭路区間へ進入可能か否かを判定し、
自車両が対向車両よりも先に前記狭路区間へ進入可能であると判定された場合、自車両が対向車両よりも先に前記狭路区間へ進入することを決定する、
ことを含む処理をプロセッサに実行させる、ことを特徴とする車両制御用コンピュータプログラム。
【請求項8】
車両制御装置が、
自車両の走行方向に向かった所定の範囲に、自車両の前方を走行する前方車両及び自車両と対向して走行する対向車両があるか否かを判定し、
前方車両及び対向車両があると判定された場合、前方車両と対向車両との間に、自車両と対向車両とがすれ違って走行することが困難な狭路区間があるか否かを判定し、
前記狭路区間があると判定された場合、対向車両に対する前方車両の対応に基づいて、自車両が対向車両よりも先に前記狭路区間へ進入可能か否かを判定し、
自車両が対向車両よりも先に前記狭路区間へ進入可能であると判定された場合、自車両が対向車両よりも先に前記狭路区間へ進入することを決定する、
ことを特徴とする車両制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置、車両制御用コンピュータプログラム及び車両制御方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
車両に搭載される自動制御装置は、自車両と他車両との間に、安全な距離をあけて走行するように、自車両を運転する。
【0003】
対向車両がある場合、自動制御装置は、自車両の前方の道路の幅を検出して、自車両と対向車両とが、安全な距離をあけてすれ違って走行できるように、自車両を制御する(例えば、特許文献1参照)。
【0004】
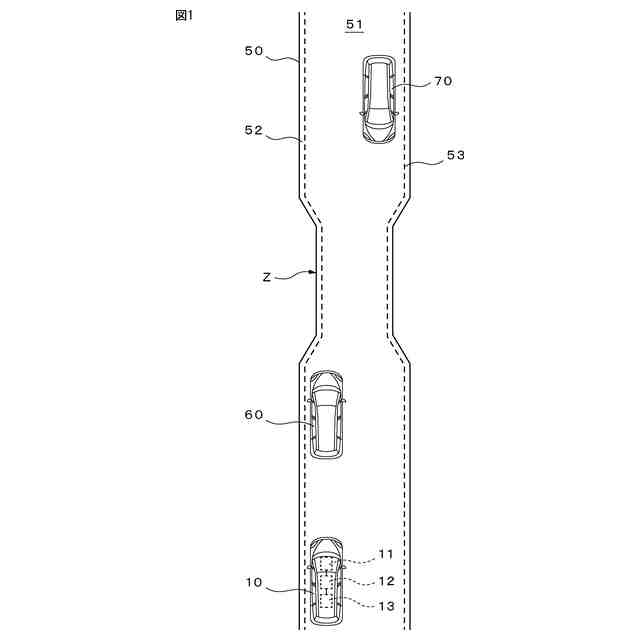
道路の幅が部分的に狭くなる狭路区間を有する地形がある。狭路区間では、自車両と対向車両との間に、安全な距離をあけてすれ違って走行することが困難である。
【0005】
自車両が走行する道路の前方に狭路区間がある場合、自車両が対向車両よりも先に狭路区間を走行するか、又は、対向車に狭路区間の走行を譲るかという状況が発生する。
【先行技術文献】
【特許文献】
【0006】
特開2020-149204号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
狭路区間において、自車両の走行を優先するか、又は、対向車両の走行を優先するかという判断は、対向車両においても行われる。自車両及び対向車両のそれぞれが先に狭路区間を走行することを決定して、両車両が狭路区間に進入すると、一方の車両は後退して他方の走行を優先させるという状況が発生し得る。
【0008】
ここで、自車両の前方に前方車両がいる場合、対向車両に対する前方車両の対応を参考にすることができる。
【0009】
そこで、本開示は、狭路区間において、対向車両に対する前方車両の対応に基づいて、自車両の走行を優先するかという判定を的確に行える車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
(1)一の実施形態によれば、車両制御装置が提供される。この車両制御装置は、自車両の走行方向に向かった所定の範囲に、自車両の前方を走行する前方車両及び自車両と対向して走行する対向車両があるか否かを判定する第1判定部と、第1判定部によって前方車両及び対向車両があると判定された場合、前方車両と対向車両との間に、自車両と対向車両とがすれ違って走行することが困難な狭路区間があるか否かを判定する第2判定部と、第2判定部によって狭路区間があると判定された場合、対向車両に対する前方車両の対応に基づいて、自車両が対向車両よりも先に狭路区間へ進入可能か否かを判定する第3判定部と、第3判定部によって、自車両が対向車両よりも先に狭路区間へ進入可能であると判定された場合、自車両が対向車両よりも先に狭路区間へ進入することを決定する決定部と、を有する、ことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ