TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025110376
公報種別
公開特許公報(A)
公開日
2025-07-28
出願番号
2024198277
出願日
2024-11-13
発明の名称
摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御方法及びシステム
出願人
斉魯工業大学(山東省科学院)
,
QILU UNIVERSITY OF TECHNOLOGY(SHANDONG ACADEMY OF SCIENCES)
代理人
弁理士法人コスモス国際特許商標事務所
主分類
G05D
1/622 20240101AFI20250718BHJP(制御;調整)
要約
【課題】摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御方法及びシステムを提供する。
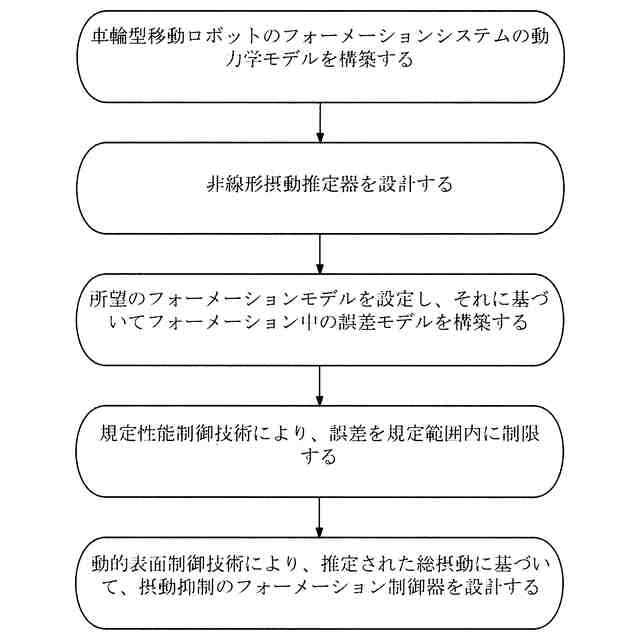
【解決手段】マルチ移動ロボットのフォーメーションシステムモデルを構築し、総摂動を推定し、移動ロボットのフォーメーション内の最初の仮想リーダーの基準軌跡を設定し、設定されたロボット間の所望の距離と所望の角度に基づいて、対応する所望のフォーメーションを形成し、フォーメーション中の距離誤差と角度誤差を作成し、規定性能制御技術により、作成された距離誤差と角度誤差を、常に対応する規定制限内にあるように制限し、距離誤差、角度誤差及び推定された総摂動に応じて、動的表面制御技術により摂動抑制のフォーメーションシステム制御器を構築する。
【選択図】図1
特許請求の範囲
【請求項1】
モデルパラメータの不確実性、及び外部からの連続的な有界摂動を考慮して、マルチ移動ロボットのフォーメーションシステムモデルを構築するステップと、
モデルパラメータの不確実性と外乱とからなる総摂動を推定するステップと、
移動ロボットのフォーメーション内の最初の仮想リーダーの基準軌跡を設定し、設定されたロボット間の所望の距離と所望の角度に基づいて、対応する所望のフォーメーションを形成し、所望の距離と実際の距離、及び所望の角度と実際の角度に基づいてフォーメーション中の距離誤差と角度誤差を作成するステップと、
規定性能制御技術により、作成された距離誤差と角度誤差を、常に対応する規定制限内にあるように制限し、リアプノフ安定論に基づいて、距離誤差、角度誤差及び推定された総摂動に応じて、動的表面制御技術により摂動抑制のフォーメーションシステム制御器を構築するステップと、
前記フォーメーションシステム制御器によってロボットフォーメーション制御を行うステップと、を含み、
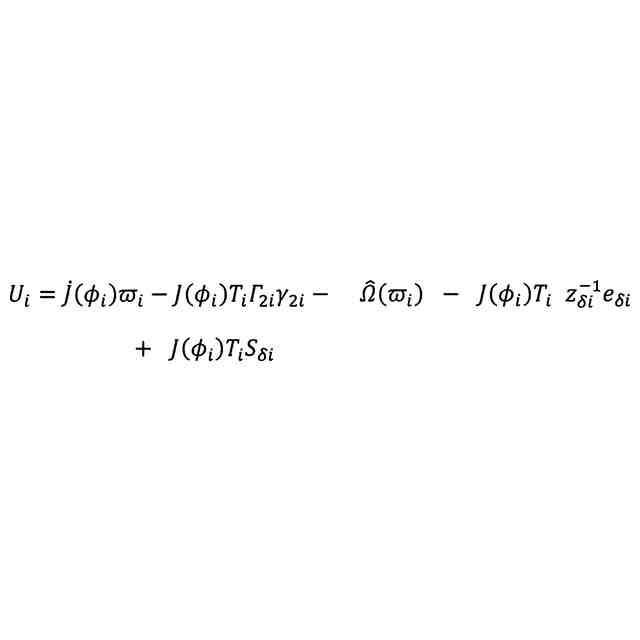
前記ロボットは車輪型移動ロボットであり、摂動抑制のフォーメーションシステム制御器は、
TIFF
2025110376000076.tif
21
166
であり、
ただし、行列
TIFF
2025110376000077.tif
23
165
であり、行列Γ
2i
=diag[Γ
21i
,Γ
22i
]であり、Γ
2li
>0で設計されたパラメータであり、
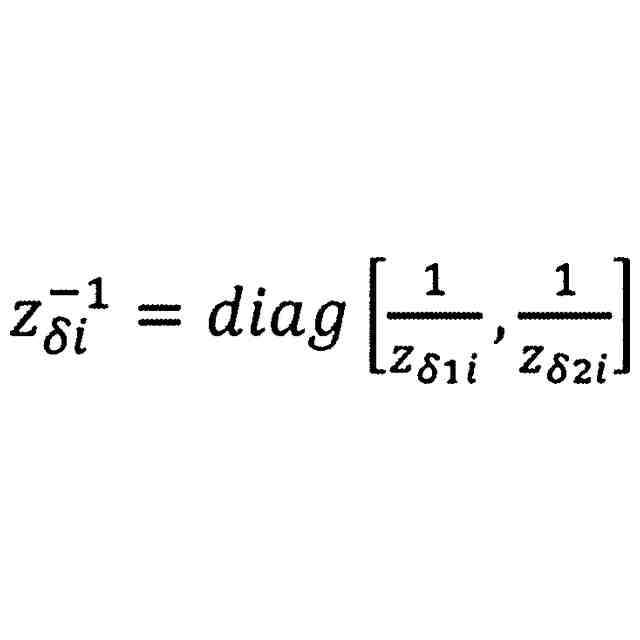
TIFF
2025110376000078.tif
13
165
であり、z
σli
>0で設計されたパラメータであり、l∈{1,2}であり、
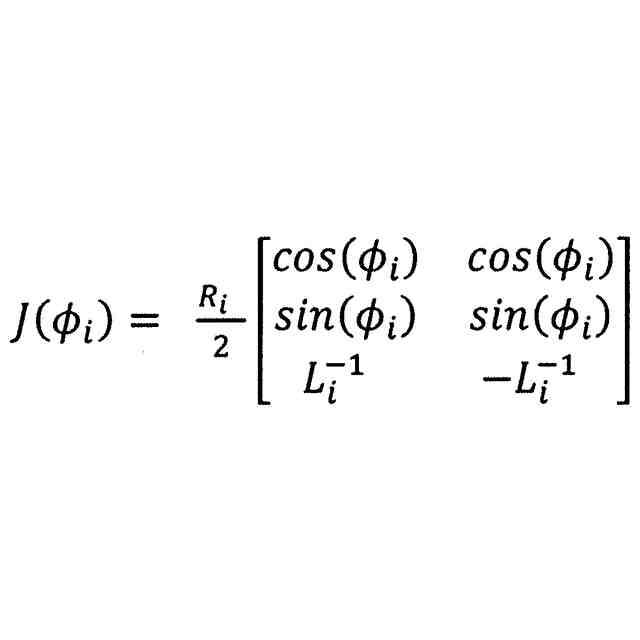
φ
i
は、フォーメーションシステムにおけるi番目のロボットとx軸方向とがなす走行角度であり、
TIFF
2025110376000079.tif
10
165
で、i番目の車輪型移動ロボットの左輪角速度と右輪角速度を表し、
TIFF
2025110376000080.tif
10
165
の推定値であり、
TIFF
2025110376000081.tif
21
165
であり、フィルタリング仮想制御ベクトル
TIFF
2025110376000082.tif
11
165
であり、仮想制御入力δ
i
=[δ
1i
,δ
2i
]
T
であり、
TIFF
2025110376000083.tif
11
165
であり、ν
fi
とν
wi
はi番目のロボットの線速度と角速度であり、
TIFF
2025110376000084.tif
16
165
であり、一対の駆動輪の間隔は2L
i
であり、各車輪の半径はR
i
であり、
S
δi
=[γ
rai
μ
rai
cos(θ),γ
θi
μ
θi
]
T
であり、ただし、対数バリア関数
TIFF
2025110376000085.tif
15
166
であり、e
Λi
(t)はフォーメーション誤差であり、
TIFF
2025110376000086.tif
11
166
の上限であり、
TIFF
2025110376000087.tif
14
166
は対数バリア関数γ
Λi
(t)の一次導関数の一部であり、Λ∈{ra,θ}であることを特徴とする、摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御方法。
続きを表示(約 1,900 文字)
【請求項2】
マルチ移動ロボットのフォーメーションシステムモデルを構築する具体的なプロセスは、移動ロボットからなるフォーメーションシステムにおける各ロボットの座標位置と、ロボットとx軸方向とがなす走行角度及び角速度との関係、並びに、システムの加速度と各摂動及び左右輪の制御入力との間の関係式を作成することを含むことを特徴とする、請求項1に記載の摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御方法。
【請求項3】
移動ロボットの速度状態情報及び制御入力情報に基づいて、モデルパラメータの不確実性と外乱とからなる総摂動を推定することを特徴とする、請求項1に記載の摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御方法。
【請求項4】
設定されたロボット間の所望の距離と所望の角度に基づいて、対応する所望のフォーメーションを形成するプロセスは、ロボット間の通信及び制御戦略によって、各ロボットiがそのリーダーロボットに効果的に追従できることを確保するとともに、リーダーとフォロワーとの間の所望の距離及び所望の角度を維持することと、
距離ra
i
(t)及び角度θ
i
(t)によりリーダーとフォロワーとがなす距離及び角度を表すことと、を含むことを特徴とする、請求項1に記載の摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御方法。
【請求項5】
規定性能制御技術により、作成された距離誤差と角度誤差を制限する具体的なプロセスは、
各ロボットの衝突回避条件として、リーダーとフォロワーとがなす距離が最小安全距離よりも大きいことを設定することと、
各ロボットの通信維持条件として、リーダーとフォロワーとがなす距離が通信を維持可能な最大範囲よりも小さいことを設定することと、
角度制約条件として、各ロボットのうちフォロワーロボットが、静止した視覚センサーによりそのリーダーを最大角度で観察できることを設定することと、を含むことを特徴とする、請求項1に記載の摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御方法。
【請求項6】
距離誤差と角度誤差のそれぞれに対して上限と下限を設定し、規定性能制御方法で、フォーメーション誤差を対数バリア関数に変換することを特徴とする、請求項5に記載の摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御方法。
【請求項7】
請求項1から6のいずれか1項に記載の摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御方法に応用される摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御システムであって、
モデルパラメータの不確実性、及び外部からの連続的な有界摂動を考慮して、マルチ移動ロボットのフォーメーションシステムモデルを構築するように配置されるモデル構築モジュールと、
モデルパラメータの不確実性と外乱とからなる総摂動を推定するように配置される推定モジュールと、
移動ロボットのフォーメーション内の最初の仮想リーダーの基準軌跡を設定し、設定されたロボット間の所望の距離と所望の角度に基づいて、対応する所望のフォーメーションを形成し、所望の距離と実際の距離、及び所望の角度と実際の角度に基づいてフォーメーション中の距離誤差と角度誤差を作成するように配置される誤差計算モジュールと、
規定性能制御技術により、作成された距離誤差と角度誤差を、常に対応する規定制限内にあるように制限し、リアプノフ安定論に基づいて、距離誤差、角度誤差及び推定された総摂動に応じて、動的表面制御技術により摂動抑制のフォーメーションシステム制御器を構築し、前記フォーメーションシステム制御器によってロボットフォーメーション制御を行うように配置される制御モジュールと、を含むことを特徴とする、摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御システム。
【請求項8】
プロセッサにより実行されると、請求項1から6のいずれか1項に記載の方法におけるステップを完了させるコンピュータコマンドを記憶するために用いられることを特徴とする、コンピュータ可読記憶媒体。
【請求項9】
メモリと、プロセッサと、メモリに記憶され、プロセッサ上で実行されるコンピュータコマンドとを含み、前記コンピュータコマンドがプロセッサにより実行されると、請求項1から6のいずれか1項に記載の方法におけるステップを完了させることを特徴とする、電子機器。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動ロボットの制御の技術分野に属し、具体的に、摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御方法及びシステムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
この部分の記述は、本発明に関連する背景技術の情報を提供するに過ぎず、必ずしも従来技術を構成するものではない。
【0003】
ロボット(例えば、車輪型ロボット)は環境監視、目標探索、農業機械、鉱業及び軍事等の分野で広く応用されている。ロボットシステムは、迅速な応答、高い柔軟性、高い信頼性及び柔軟な機械構造等の利点を有する。マルチロボット協調フォーメーション制御は、単一のロボットにより達成できない効率、耐障害性及び経済性を提供し、目標に対する効率的な協調操作を実現することができる。協調フォーメーションでは、マルチロボットシステムは、環境認知及び単体状態情報を共有し、タスクと外部環境の制約によってフォーメーション形状を動的に調整して、タスクの完成度及び実行効率を顕著に向上させることができる。マルチロボットのフォーメーション制御の問題を解決するために、行動ベースの制御、仮想構造及びリーダー・フォロワー構造を含む様々な制御戦略が採用されている。中でも、簡単性と拡張性から、リーダー・フォロワーフォーメーション構造はより注目されている。
【0004】
実際のマルチ移動ロボットのフォーメーション制御では、明らかなように、システム全体が常に安定的に動作することを確保することは極めて重要である。実際の場合に、様々な移動ロボットが存在するため、モデルパラメータが不確実性を有し、且つ実際のフォーメーション走行時に、様々な未知の外乱を受けることがある。したがって、外乱及びモデルパラメータの不確実性を含むこれらの総摂動を相殺し、システムに対する影響を最小限に抑えることができる制御戦略の設計は、特に重要になった。現在、単一の移動ロボットの摂動抑制についての研究は比較的進んでいるが、マルチ移動ロボットのフォーメーション制御はほとんど依然として理想的な仮定条件にとどまり、モデルの不確実性及び外乱の影響が考慮されていない。したがって、本発明では、摂動推定器を設計することで、総摂動を相殺することによってフォーメーション制御がより高いロバスト性を有するようになる。
【0005】
フォーメーション制御では、最終的に安定したフォーメーションの形成が極めて重要であるだけでなく、最終的なフォーメーションを形成するプロセスでの各ロボット間の距離及び角度を考慮することも必要である。距離又は角度が大きすぎると、ロボット間の通信が中断されるか、又は通信に必要なリソースが多くなる可能性があり、距離が小さすぎると、ロボット同士が衝突し、さらにロボットの動作軌跡がずれ、ひいては物理的な損傷により動作に影響する可能性がある。このため、フォーメーション制御のプロセスで、ロボット間の距離及び角度に上限と下限を設定することは極めて重要である。しかしながら、現在の移動ロボットのフォーメーション制御では、ほとんどこの点を考慮していない。本発明は、規定性能制御技術を採用することによって、ロボット間の距離及び角度が常に許容可能な所定の範囲内にあることを確保する。
【0006】
移動ロボットの制御戦略の設計では、現在のほとんどの研究にバックステッピング法が使用されている。バックステッピング法とは、リアプノフ安定論に基づいて設計される非線形制御方法を指す。システムの仮想制御入力を段階的に設計することによって、システムのリアプノフ関数を各ステップごとに徐々に小さくし、各ステップの制御率の設計には前のステップの微分が使用され、システムの安定性を実現する。しかしながら、高次元系の場合に、微分爆発の問題が発生しやすい。
【発明の概要】
【0007】
本発明は、上記問題を解決するために、摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御方法及びシステムを提供し、本発明では、リーダー・フォロワー構造、規定性能制御技術及び動的表面制御技術を利用して、摂動推定器を構築することによって、移動ロボットは、摂動が存在する場合でも、最終的にフォーメーション走行を完了できるだけでなく、衝突を回避して常に通信を維持することができる。
【0008】
いくつかの実施例によると、本発明は以下の技術的解決手段を採用する。
【0009】
モデルパラメータの不確実性、及び外部からの連続的な有界摂動を考慮して、マルチ移動ロボットのフォーメーションシステムモデルを構築するステップと、
モデルパラメータの不確実性と外乱とからなる総摂動を推定するステップと、
移動ロボットのフォーメーション内の最初の仮想リーダーの基準軌跡を設定し、設定されたロボット間の所望の距離と所望の角度に基づいて、対応する所望のフォーメーションを形成し、所望の距離と実際の距離、及び所望の角度と実際の角度に基づいてフォーメーション中の距離誤差と角度誤差を作成するステップと、
規定性能制御技術により、作成された距離誤差と角度誤差を、常に対応する規定制限内にあるように制限し、リアプノフ安定論に基づいて、距離誤差、角度誤差及び推定された総摂動に応じて、動的表面制御技術により摂動抑制のフォーメーションシステム制御器を構築するステップと、
前記フォーメーションシステム制御器によってロボットフォーメーション制御を行うステップと、を含む、摂動及び通信の制限を受けた移動ロボットの衝突回避フォーメーション制御方法である。
【0010】
選択的な実施形態として、マルチ移動ロボットのフォーメーションシステムモデルを構築する具体的なプロセスは、移動ロボットからなるフォーメーションシステムにおける各ロボットの座標位置と、ロボットとx軸方向とがなす走行角度及び角速度との関係、並びに、各摂動と移動ロボットとの間の関係式を作成することを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ