TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105594
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2024233166
出願日
2024-12-27
発明の名称
金属構造部品用の多軸3Dプリント装置及びアーク式付加製造方法
出願人
個人
,
個人
代理人
個人
主分類
B23K
9/04 20060101AFI20250703BHJP(工作機械;他に分類されない金属加工)
要約
【課題】金属構造部品用の多軸3Dプリント装置およびアーク式付加製造方法を提供する。
【解決手段】ロボットアーム装置、移動ガイドレール装置、ポジショナー装置の多軸連動プリントモードに基づき、6軸ロボットアームの拡張により、ロボットアームの自由な姿勢のプリントが可能になり、ガイドレールを移動させることにより、ガイドレールに沿って軸に従う移動プリントが可能になり、3Dプリントロボットのオープンな移動空間が増加し、2軸ポジショナーにより、複雑な金属構造部品に対するサポート無しの多軸3Dプリントを実現し、材料コストを節約し、後加工プロセスを簡素化し、同時に、ワールド座標系による連動線形補間により、プリント精度や大型サイズを効果的に制御し、さらに大型で複雑な金属構造部品用の多軸3Dプリントを実現する。
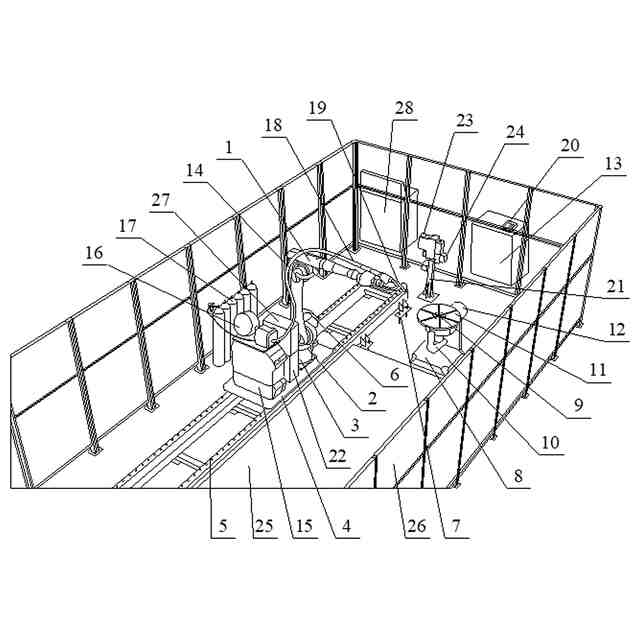
【選択図】図1
特許請求の範囲
【請求項1】
金属構造部品用の多軸3Dプリント装置であって、6軸産業用ロボット、底部ベース、付加製造用電源装置、及び移動ガイドレール装置を含み、6軸産業用ロボットの底部は底部ベースに回転可能に接続され、6軸産業用ロボットと底部ベースがロボットアーム装置を構成し、付加製造用電源装置の底部とロボットアーム装置の底部は支持ベースプレートに固定され、支持ベースプレートは移動ガイドレール装置の長さ方向に沿って移動し、6軸産業用ロボットの先端には溶接ガンが固定され、付加製造用電源装置はワイヤ供給チューブを介して溶接ガンに接続され、
移動ガイドレール装置の一方側には2軸ポジショナーと組み合わせ作業台が設置され、組み合わせ作業台は、移動ガイドレール装置と平行な長尺状の作業台であり、2軸ポジショナーは、回転軸と反転軸を含み、回転軸の回転角度は無制限の角度であり、反転軸の反転角度は制限された角度であり、2軸ポジショナーの上面には回転ディスクが設置され、金属構造部品は組み合わせ作業台または回転ディスクの上に配置され、移動ガイドレール装置と2軸ポジショナーは、それぞれ外部軸モータを通じて対応する1軸と2軸の駆動を制御することを特徴とする金属構造部品用の多軸3Dプリント装置。
続きを表示(約 3,300 文字)
【請求項2】
移動ガイドレール装置は、移動ガイドレール、ガイドレールクローラ、およびガイドレールサポートを含み、移動ガイドレール装置の両側は、ガイドレールサポートを介して地面にアンカー固定され、移動ガイドレールは、移動ガイドレール装置の両側に全長に亘って設置され、ガイドレールクローラは、支持ベースプレートに接続され、ガイドレールクローラは、移動ガイドレールと噛み合って接続されることを特徴とする請求項1に記載の金属構造部品用の多軸3Dプリント装置。
【請求項3】
付加製造用電源装置は、CMT溶接機、ワイヤリール、ワイヤ供給チューブ、溶接ガン、電気制御ボックス、及び清浄器を含み、溶接ガンは、6軸産業用ロボットの先端に固定され、清浄器は電気制御ボックスの直下に配置されて一体化装置を形成し、電気制御ボックス、清浄器、CMT溶接機の底部は支持ベースプレートに固定され、ワイヤリールはCMT溶接機に固定されることを特徴とする請求項1に記載の金属構造部品用の多軸3Dプリント装置。
【請求項4】
移動ガイドレール装置の外側の地面には、統合制御キャビネット、ティーチングペンダント、ビジュアル操作コンソール、およびワイヤ切断機が設置され、
統合制御キャビネットは、6軸産業用ロボット、移動ガイドレール装置、及び2軸ポジショナーの合計9軸の移動を制御するように配置され、ビジュアル操作コンソールは、プリントプロセスの視覚的な制御とオンライン監視を実行するように配置され、ワイヤ切断機にはスパッタ防止スプレー装置と溶接スラグ洗浄装置が設置されることを特徴とする請求項1に記載の金属構造部品用の多軸3Dプリント装置。
【請求項5】
2軸ポジショナーは移動ガイドレール装置の一方側の端部に位置し、同じ側には対応する移動ガイドレール装置の長さの範囲内に組合せ作業台が設置され、移動ガイドレール装置の他方側の地面には保護ガスボンベが設置され、保護ガスボンベは、長ガスパイプを通じて溶接ガンにガスを供給し、ワイヤ切断機及び清浄器は、6軸産業用ロボットの位置に合わせて配置され、金属構造部品用の多軸3Dプリント装置の周囲には、アーク防止プレートが取り囲まれ、統合制御キャビネット、ティーチングペンダント、及びビジュアル操作コンソールは、アーク防止プレートの外側に配置されることを特徴とする請求項4に記載の金属構造部品用の多軸3Dプリント装置。
【請求項6】
請求項1~5のいずれか一項に記載の金属構造部品用の多軸3Dプリント装置のアーク式付加製造方法であって、
金属構造部品の3Dモデルを設計するステップS1と、
3Dモデルをスライスパス計画ソフトウェアに導入し、スライスパス計画ソフトウェアによって具体的なプリントプログラムを提供するステップS2と、
プリントプログラムを制御ソフトウェアに導入し、制御ソフトウェアによってモデルのスライスパスをインストールするステップS3と、
金属構造部品の特性に応じて、2軸ポジショナーでプリントすること又は組合せ作業台でプリントすることを選択し、回転ディスクでプリントすることを選択した場合、6軸産業用ロボット、移動ガイドレール装置、及び2軸ポジショナーが連動して移動し、組合せ作業台でプリントすることを選択した場合、6軸産業用ロボットと移動式ガイドレール装置が連動して移動するステップS4と、
溶接ガンのアークで金属ワイヤを溶融し、金属構造部品の多軸3Dプリントを実行するステップS5と、を含むことを特徴とする金属構造部品用の多軸3Dプリント装置のアーク式付加製造方法。
【請求項7】
プログラム計画パスに応じて、統合制御キャビネットが2軸ポジショナーの回転軸と反転軸の回転をリアルタイムで制御することにより、構造部品の任意の部材をプリントするときに、部品のプリント角度が常に臨界プリント角度以上になり、回転ディスクでの金属構造部品が重力オーバーハング効果を克服できるようになることを特徴とする請求項6に記載の金属構造部品用の多軸3Dプリント装置のアーク式付加製造方法。
【請求項8】
プログラム計画パスアルゴリズムのプロセスは、プリントサブ領域の分割、局所的な最適なプリント方向の計算およびプリント方向の角度調整を含み、以下の通りであり、
構造部品をプリントサブ領域に分割し、局所的な最適なプリント方向θ
i
を計算し、オーバーハング臨界角θを設定し、θ
i
≧θの場合、直接プリントし、θ
i
<θの場合、重力によるオーバーハング効果が発生し、2軸ポジショナーの2つの移動軸を調整し、調整された局所的な最適なプリント方向θ
i
’≧θになるようにし、θ
i
’=90°を垂直方向として、サポート構造無しの多軸3Dプリントを実現し、
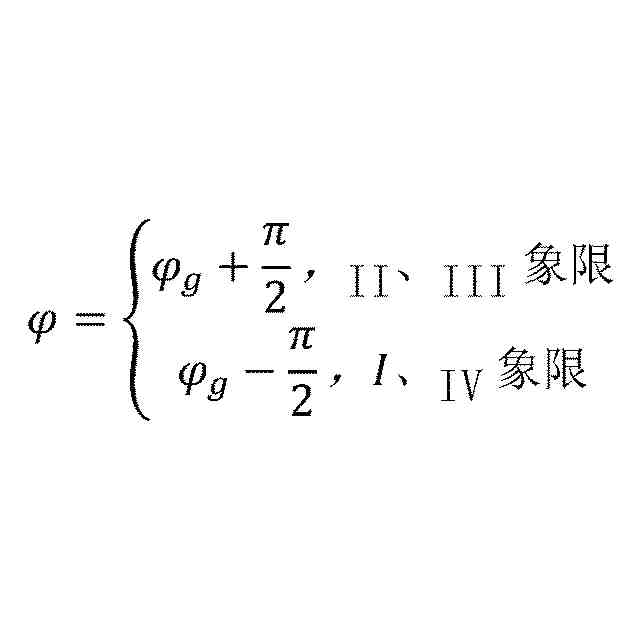
局所的な最適なプリント方向は、プリントサブ領域内の境界ユニットの傾斜方向によって決定され、構造境界の傾斜方向は、境界とX軸の間の角度であり、コンボリューションカーネルを使用してユニットの密度勾配の方向を取得し、直交変換を使用して境界ユニットの傾斜方向を取得し、
TIFF
2025105594000008.tif
26
70
式中、
TIFF
2025105594000009.tif
6
5
は0とπとの間にある構造境界の傾斜方向であり、
TIFF
2025105594000010.tif
6
6
はユニット密度の勾配ベクトルであり、
異なるプリントサブ領域は異なるプリント方向の角度調整に対応し、これは2軸ポジショナーの回転のリアルタイム調整によって表されることを特徴とする請求項7に記載の金属構造部品用の多軸3Dプリント装置のアーク式付加製造方法。
【請求項9】
6軸産業用ロボット、移動ガイドレール装置、及び2軸ポジショナ-で9軸移動を構成し、統一されたワールド座標系で連動線形補間と誤差補償を実行するように設定し、移動ガイドレール装置の1軸と2軸ポジショナーの2軸は連動されず、連動線形補間のパス計画は変位計画と速度計画を含み、各移動軸の変位変化を制御することによって変位計画を実行し、連続した複数セグメントのポリラインに応じて軌跡を補間し、各移動軸i(i=1~9)の座標(x
i
、y
i
、z
i
)について線形補間アルゴリズムは以下のとおりであり、
x
i
=x
1
+(x
2
-x
1
)×t
y
i
=y
1
+(y
2
-y
1
)×t
z
i
=z
1
+(z
2
-z
1
)×t
式中、(x
1
,y
1
,z
1
)は直線の始点であり、(x
2
,y
2
,z
2
)は直線の終点であり、tは時間パラメータであり、tの取り得る値の区間は[0,1]であり、
各移動軸の移動を制御する過程で、移動誤差を点ごとに計算し判定し、計画されたパス軌跡と比較して、比較結果に基づいて次の移動方向を決定し、
連動線形補間の速度計画を加速区間の速度計画と等速区間の速度計画に分け、
線形補間の誤差補償は、静的誤差補償と動的誤差補償を含むことを特徴とする請求項8に記載の金属構造部品用の多軸3Dプリント装置のアーク式付加製造方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、構造工学および3Dプリントの技術分野に属し、特に金属構造部品用の多軸3Dプリント装置及びアーク式付加製造方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
金属付加製造としても知られる金属3Dプリントには、従来の金属製造プロセスと比較して高効率および高精度等の利点があり、複雑な金属構造部品の加工・製造に適している。ただし、金属3Dプリントでは、プリントを確実に成功させるために、金属構造部品が対応する製造上の制約を満たす必要があり、多くの製造上の制約の中でも、重力によって引き起こされるオーバーハング効果の制限は、金属の3Dプリントにおける主な制約の1つであり、オーバーハング効果は、構造の境界と水平面の間の角度が臨界値より小さい場合、重力の存在により、層ごとの堆積プロセス中に金属材料が崩壊することに繋がり、オーバーハング効果はプリント品質に影響を与え、構造部品のプリントに失敗することもある。
【0003】
オーバーハング効果を克服する効果的な方法は、構造設計の観点から、金属構造の最適設計に角度制約を導入して、角度の製造制約を満たす最適な構成を取得することであり、従来の3軸ロボットの金属3Dプリントでは、支持の無駄を回避するために製造上の制約を満たす自己支持構造を得ることができるが、多くの場合、材料消費量の大幅な増加と構造性能の大幅な低下をもたらす。
【0004】
機械産業の急速な発展に伴い、金属構造部品用の多軸3Dプリント技術は航空宇宙、車両工学などの分野で広く使用され、3軸より大きな金属構造部品用の多軸3Dプリンタは、自由回転ベースを備えており、プリントプロセス中にプリント方向を動的に調整してオーバーハング効果を回避し、これは、金属構造部品の3軸3Dプリント自己支持構造の体積の増加と性能の大幅な低下の問題を効果的に解決する。したがって、金属構造部品用の多軸ロボット3Dプリント装置の合理的かつ効果的な設計と構築は、複雑な構造の最適な設計と製造を統合するための重要な前提条件である。
【0005】
要約すると、金属構造部品用の多軸3Dプリント装置とアーク式付加製造方法を研究し、複雑で長い金属構造部品の付加製造に適応し、プリントされる金属構造部品のサイズ範囲を拡大し、支持構造のプリントコストを節約し、サポート無しで複雑な付加金属構造部品をプリントする必要性を認識する必要がある。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、従来技術の欠点を克服し、金属構造部品用の多軸3Dプリント装置およびアーク式付加製造方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
この金属構造部品用の多軸3Dプリント装置は、6軸産業用ロボット、底部ベース、付加製造用電源装置、および移動ガイドレール装置を含み、6軸産業用ロボットの底部は底部ベースに回転可能に接続され、6軸産業用ロボットと底部ベースがロボットアーム装置を構成し、付加製造用電源装置の底部とロボットアーム装置の底部は支持ベースプレートに固定され、支持ベースプレートは移動ガイドレール装置の長さ方向に沿って移動し、6軸産業用ロボットの先端には溶接ガンが固定され、付加製造用電源装置はワイヤ供給チューブを介して溶接ガンに接続され、
移動ガイドレール装置の一方側には2軸ポジショナーと組み合わせ作業台が設置され、組み合わせ作業台は、移動ガイドレール装置と平行な長尺状の作業台であり、2軸ポジショナーは、回転軸と反転軸を含み、回転軸の回転角度は無制限の角度であるが、反転軸の反転角度は制限された角度であり、2軸ポジショナーの上面には回転ディスクが設置され、金属構造部品は組み合わせ作業台または回転ディスクの上に配置され、移動ガイドレール装置と2軸ポジショナーは、それぞれ外部軸モータを通じて対応する1軸と2軸の駆動を制御する。
【0008】
好ましくは、移動ガイドレール装置は、移動ガイドレール、ガイドレールクローラ、およびガイドレールサポートを含み、移動ガイドレール装置の両側は、ガイドレールサポートを介して地面にアンカー固定され、移動ガイドレールは、移動ガイドレール装置の両側に全長に亘って設置され、ガイドレールクローラは、支持ベースプレートに接続され、ガイドレールクローラは、移動ガイドレールと噛み合って接続される。
【0009】
好ましくは、付加製造用電源装置は、CMT溶接機、ワイヤリール、ワイヤ供給チューブ、溶接ガン、電気制御ボックス、及び清浄器を含み、溶接ガンは、6軸産業用ロボットの先端に固定され、清浄器は電気制御ボックスの直下に配置されて一体化装置を形成し、電気制御ボックス、清浄器、CMT溶接機の底部は支持ベースプレートに固定され、ワイヤリールはCMT溶接機に固定される。
【0010】
好ましくは、移動ガイドレール装置の外側の地面には、統合制御キャビネット、ティーチングペンダント、ビジュアル操作コンソール、およびワイヤ切断機が設置され、統合制御キャビネットは、6軸産業用ロボット、移動ガイドレール装置、及び2軸ポジショナーの合計9軸の移動を制御するように配置され、ビジュアル操作コンソールは、プリントプロセスの視覚的な制御とオンライン監視を実行するように配置され、ワイヤ切断機にはスパッタ防止スプレー装置と溶接スラグ洗浄装置が設置される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ