TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105378
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2024037972
出願日
2024-03-12
発明の名称
ロボット関節モジュール制御システムの最適化方法
出願人
江蘇科技大学
,
JIANGSU UNIVERSITY OF SCIENCE AND TECHNOLOGY
代理人
弁理士法人コスモス国際特許商標事務所
主分類
B25J
13/00 20060101AFI20250703BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボット関節モジュール制御パラメータの最適化効率と精度を効果的に向上させ、性能最適化に効果的な理論的基礎を提供する。
【解決手段】ロボット関節モジュールの応答性能試験を行い、負荷を表す質量m、関節モジュールの出力速度v、比例係数P、積分係数I、微分係数Dを試験変数として性能試験を設計し、関節モジュール応答性能データセットを取得するステップと、ロボット関節モジュールの応答性能予測を行い、予測モデルを構築し、応答性能データセットによって予測モデルをトレーニングするステップと、関節モジュール応答性能の最適化を行い、トレーニングされた予測モデルで最適化後の制御パラメータを取得するステップとを含むロボット関節モジュール制御システムの最適化方法。
【選択図】図1
特許請求の範囲
【請求項1】
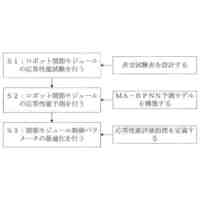
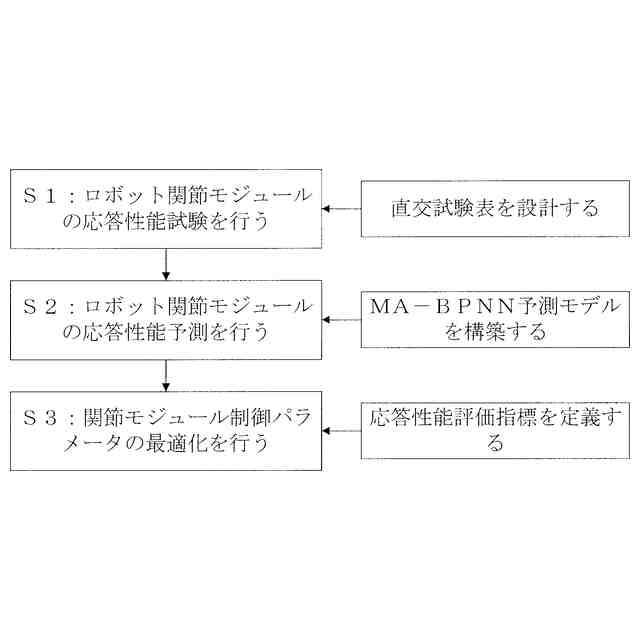
ロボット関節モジュールの応答性能試験を行い、負荷を表す分銅質量m、関節モジュールの出力速度v、関節モジュール制御システムの比例係数P、関節モジュール制御システムの積分係数I、関節モジュール制御システムの微分係数Dを試験変数として5因子応答性能試験を設計し、関節モジュール応答性能データセットを取得するステップS1と、
ロボット関節モジュールの応答性能予測を行い、予測モデルを構築し、ステップS1で取得した関節モジュール応答性能データセットによって予測モデルをトレーニングするステップS2と、
関節モジュール応答性能の最適化を行い、ロボット関節モジュール応答性能指標を確立し、ステップS1における5因子範囲内で均一に値を取ってパラメータ組合を形成し、パラメータ組合をそれぞれステップS2でトレーニングされた予測モデルに代入して応答性能指標の最小値を取得して最適化後の制御パラメータとするステップS3とを含むことを特徴とするロボット関節モジュール制御システムの最適化方法。
続きを表示(約 4,000 文字)
【請求項2】
ステップS1における具体的なロボット関節モジュールの応答性能試験ステップは以下の通りであり、
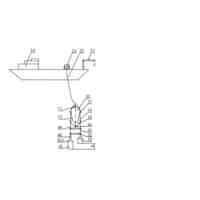
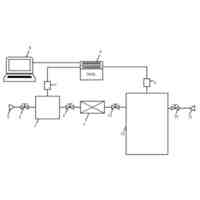
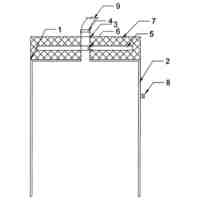
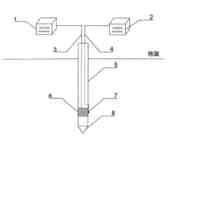
ステップS1.1において、ロボット関節モジュール応答性能試験台を構築し、試験されるロボット関節モジュール1を選択して固定フランジ7によってベース2に固定し、ベース2がプレート5に固定的に取り付けられ、ロボット関節モジュール1の出力フランジ6にリンク3が備えられ、リンク3の他端に質量がmの分銅4が配置され、分銅4の質量mが試験要求に応じて交換され、ロボット関節モジュール1をホストコンピュータデバッガに接続し、ホストコンピュータは試験に設計された速度と負荷によりロボット関節モジュール1を制御し、且つPIDのパラメータ値を調節し、
ステップS1.2において、試験設計を行い、直交試験表を設計し、負荷を表す分銅質量m、関節モジュールの出力速度v、比例係数P、積分係数I、微分係数Dを試験変数として5因子のn(n≧5)レベルの直交試験表を設計し、
ステップS1.3において、関節モジュール応答性能データセットを用い、ステップS1.2の直交試験表により、ステップS1.1で構築したロボット関節モジュール応答性能試験台で試験を行い、異なる試験パラメータでのロボット関節モジュール速度応答曲線を取得し、且つ速度応答曲線から関節モジュールの応答性能指標であるオーバーシュート量O
shoot
と応答時間R
time
を抽出し、記録し記憶し、関節モジュール応答性能データセットを形成することを特徴とする請求項1に記載のロボット関節モジュール制御システムの最適化方法。
【請求項3】
前記ステップS2における関節モジュール応答性能最適化の具体的なステップは以下の通りであり、
ステップS2.1において、MA-BPNNメイフライ-ニューラルネットワーク予測モデルを構築し、前記予測モデルはMAメイフライモデルとBPNN逆伝播ニューラルネットワークモデルを含み、MAメイフライモデルはBPNN逆伝播ニューラルネットワークモデルに最適化後の重みと閾値を提供し、
ステップS2.2において、MA-BPNN予測モデルをトレーニングし、まず、ステップS1.3で取得した関節モジュール応答性能データセットをモデルに導入し、メイフライ個体群の数が最初にNであり、続いて、オスとメスメイフライの位置を更新し、オスとメスメイフライの適応度値を計算し、続いて、反復して子のメイフライを生成して子のメイフライの位置を更新し、子のメイフライの適応度値がF
v
より小さくなると、反復を終了し、そうでなければ、子のメイフライを生成し続けて反復し、
メイフライが生成したグローバル最適パラメータをニューラルネットワークモデルの重みと閾値として、予測を行い、誤差を計算し、反復後の誤差がE
u
より小さくなると、オーバーシュート量O
shoot
と応答時間R
time
の予測結果を出力し、MA-BPNN予測モデルのトレーニングが完了することを特徴とする請求項1に記載のロボット関節モジュール制御システムの最適化方法。
【請求項4】
ステップS2.2におけるMA-BPNNメイフライ-ニューラルネットワーク予測モデルに対するトレーニングステップは以下の通りであり、
ステップS2.2.1において、モデルを初期化し、ステップ1.3で取得した関節モジュール応答性能データセットをモデルに導入し、メイフライモデルにおけるオスとメスメイフライの数をそれぞれN
mayflies
個に設定し、各メイフライの位置は1組のBPニューラルネットワークの重みと閾値パラメータを表し、速度はこれらのパラメータの更新過程におけるステップサイズを表し、BPニューラルネットワークの重みと閾値を初期化し、メイフライの位置と速度を初期化し、
ステップS2.2.2において、オスメイフライ個体の速度と位置を更新し、式(1)と(2)によってt+1回目反復後のi番目のオスメイフライの第j次元探索空間での速度v
t+1
mij
と位置x
t+1
ij
を更新し、
TIFF
2025105378000020.tif
29
169
ただし、tはt回目の反復であり、x
t
ij
はt回目反復後のi番目のオスメイフライの第j次元探索空間での位置であり、v
t
mij
はt回目反復後のi番目のオスメイフライの第j次元探索空間での速度であり、
TIFF
2025105378000021.tif
46
170
daはダンス係数であり、メスメイフライを吸引する過程を記述するためのものであり、r
c
は一つの乱数であり、r
c
∈[-1,1]であり、F
3
(x)は適応度関数であり、式3に示すように、
TIFF
2025105378000022.tif
12
170
ただし、xはメイフライの位置であり、y
actual
は実際出力値であり、y
predicted
は予測出力値であり、Nはサンプルセットの数であり、
ステップS2.2.3において、メスメイフライ個体の速度と位置を更新し、式(4)と(5)によってt+1回目反復後のi番目のメスメイフライの第j次元探索空間での速度v
t+1
fij
と位置y
t+1
ij
を更新し、
TIFF
2025105378000023.tif
29
170
ただし、y
t
ij
はt回目反復後のi番目のメスメイフライの第j次元探索空間での位置であり、v
t
fij
はt回目反復後のi番目のメスメイフライの第j次元探索空間での速度であり、a
3
はメスメイフライの吸引係数であり、r
mf
はメスメイフライとオスメイフライとの間の距離であり、flはランダム飛行係数であり、
ステップS2.2.4において、子のメイフライを生成し、式(6)と(7)によりメイフライ個体群を更新し、
TIFF
2025105378000024.tif
18
170
ただし、offspring
1
とoffspring
2
は二つの子のメイフライを表し、r
l
は乱数であり、r
l
∈[-1,1]であり、maleとfemaleはそれぞれオスメイフライとメスメイフライを表し、
ステップS2.2.5において、適応度値を判断し、F
v
は目標適応度値であり、F
3
(x)≦F
v
ならば、反復を終了し、そうでなければ、ステップS2.2.2に移行して再度反復し、
ステップS2.2.6において、メイフライのグローバル最適位置を出力し、最適化された重みと閾値を取得し、
ステップS2.2.7において、BPNNの順伝播を行い、入力ニューロンは分銅質量m、関節モジュールの出力速度v、関節モジュール制御システムの比例係数P、積分係数I、微分係数Dであり、出力ニューロンはオーバーシュート量O
shoot
と応答時間R
time
であり、入力層のデータを最適化後の重みと閾値によって隠れ層のニューロンに伝達し、隠れ層のニューロンで励起関数F
1
(x)=(e
x
-e
-x
)/(e
x
+e
-x
)を用いて式(8)により隠れ層のg番目のニューロンθ
g
を計算し、隠れ層のデータを重みと閾値によって出力層のニューロンに伝達し、出力層のニューロンで励起関数F
【請求項5】
前記ステップS3における関節モジュール応答性能最適化の具体的なステップは以下の通りであり、
ステップS3.1において、ロボット関節モジュール応答性能指標Kを確立し、
TIFF
2025105378000028.tif
6
170
ただし、α
1
はオーバーシュート量重み係数であり、α
2
は応答時間重み係数であり、α
1
+α
2
=1であり、
ステップS3.2において、ロボット関節モジュールに影響を及ぼす5因子である分銅質量m、関節モジュールの出力速度v、比例係数P、積分係数I、微分係数Dを試験変数とし、各因子としては各自の値区間内で均一にそれぞれn(n≧5)個の値を取り、n
5
組のパラメータ組合を形成し、
ステップS3.3において、ステップS3.2のn
5
組のパラメータ組合をそれぞれステップS2でトレーニングされたMA-BPNNモデルに代入し、パラメータ組合ごとに応答性能指標Kを計算し、最小K値を取得した比例係数P、積分係数I及び微分係数Dのパラメータ組合を最適化後の最適制御パラメータとすることを特徴とする請求項1又は4に記載のロボット関節モジュール制御システムの最適化方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御システムの最適化方法に関し、特に、ロボット関節モジュール制御システムの最適化方法に関し、ロボット関節制御の技術分野に属するものである。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
人工知能とロボットの活用が人間の生活や仕事に融合することがますます多くなってくるに伴い、ロボット関節モジュールは関節型ロボットが運動を実現するために不可欠な核心的運動部材となる。従って、ロボット関節モジュールの性能はロボット本体の伝動精度や、運転速度、振動、騒音等の性能指標に直接影響を及ぼす。単一のロボット関節モジュールが採用する制御方法はPID制御であり、比例係数P、積分係数I及び微分係数Dはその主な制御パラメータとなる。ロボット関節モジュールの応答性能指標としては主にオーバーシュート量と応答時間がある。ロボット関節モジュール応答性能に影響を及ぼす因子としては、負荷、出力回転速度及び制御パラメータ(比例係数P、積分係数I及び微分係数D)があり、その中、負荷と出力回転速度はロボット関節モジュールの動作状況により決められ、制御パラメータは人為的に設定され、従って、制御パラメータの良否は直接ロボット関節モジュール性能の優劣を決定する。以上をまとめると、ロボット関節モジュールの制御パラメータを最適化し、関節モジュールの応答性能を向上させることで、ロボット全体の性能のパフォーマンスを効果的に向上させることができる。
【0003】
現在、従来のデバッグ方法はロボット全体に対して試験法を用いて制御パラメータのデバッグと較正を行う場合が多いが、単一の関節モジュールの最適制御パラメータを精確に取得しにくいことに加えて、大量の試験を必要とするので、最適化効率が低い。
【0004】
中国特許CN108227479Bには、全体ゲイン、比例ゲイン、積分ゲイン、微分ゲインの総合的調節によって、システムのより速い応答及びデバイスのより速い安定化を可能とする多関節ロボットのPID制御方法及びPID制御システムが開示されている。しかし、この対照文献は異なる速度と負荷でPID制御パラメータがその制御性能に及ぼす影響を考慮しておらず、パラメータ選択と異常値処理の面において欠点があり、高精度制御に対して要求を満たすことができない。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の目的は、従来技術に存在する問題に対して、ロボット関節モジュール制御システムの最適化方法を提供することである。この方法は、ロボット関節モジュールの応答性能試験とインテリジェントモデルを組み合わせることで、ロボット関節モジュール応答性能の予測を実現できると共に、関節モジュールの制御パラメータを最適化することができる。
【課題を解決するための手段】
【0006】
ロボット関節モジュールの応答性能試験を行い、負荷を表す分銅質量m、関節モジュールの出力速度v、関節モジュール制御システムの比例係数P、関節モジュール制御システムの積分係数I、関節モジュール制御システムの微分係数Dを試験変数として5因子応答性能試験を設計し、関節モジュール応答性能データセットを取得するステップS1と、
ロボット関節モジュールの応答性能予測を行い、予測モデルを構築し、ステップS1で取得した関節モジュール応答性能データセットによって予測モデルをトレーニングするステップS2と、
関節モジュール応答性能の最適化を行い、ロボット関節モジュール応答性能指標を確立し、ステップS1における5因子範囲内で均一に値を取ってパラメータ組合を形成し、パラメータ組合をそれぞれステップS2でトレーニングされた予測モデルに代入して応答性能指標の最小値を取得して最適化後の制御パラメータとするステップS3とを含むロボット関節モジュール制御システムの最適化方法である。
【0007】
本発明は異なる速度と負荷でPID制御パラメータがその制御性能に及ぼす影響を考慮しながら、ロボット関節モジュールの応答性能試験とインテリジェントモデルを組み合わせることで、ロボット関節モジュール応答性能の予測を実現できると共に、関節モジュールの制御パラメータを最適化することができる。
【0008】
好ましくは、関節モジュールにおいて異なる速度と負荷でPID制御パラメータがその制御性能に及ぼす影響を究めるために、ステップS1における具体的なロボット関節モジュールの応答性能試験ステップは以下の通りであり、
ステップS1.1において、ロボット関節モジュール応答性能試験台を構築し、試験されるロボット関節モジュール1を選択して固定フランジ7によってベース2に固定し、ベース2がプレート5に固定的に取り付けられ、ロボット関節モジュール1の出力フランジ6にリンク3が備えられ、リンク3の他端に質量がmの分銅4が配置され、分銅4の質量mが試験要求に応じて交換され、ロボット関節モジュール1をホストコンピュータデバッガに接続し、ホストコンピュータは試験に設計された速度と負荷によりロボット関節モジュール1を制御し、且つPIDのパラメータ値を調節し、
ステップS1.2において、試験設計を行い、直交試験表を設計し、負荷を表す分銅質量m、関節モジュールの出力速度v、比例係数P、積分係数I、微分係数Dを試験変数として5因子のn(n≧5)レベルの直交試験表を設計し、
ステップS1.3において、関節モジュール応答性能データセットを用い、ステップS1.2の直交試験表により、ステップS1.1で構築したロボット関節モジュール応答性能試験台で試験を行い、異なる試験パラメータでのロボット関節モジュール速度応答曲線を取得し、且つ速度応答曲線から関節モジュールの応答性能指標であるオーバーシュート量O
shoot
と応答時間R
time
を抽出し、記録し記憶し、関節モジュール応答性能データセットを形成する。
【0009】
関節モジュールは集積化された機械デバイスであり、機械構造の異なる方向での回転、揺動、並進等の運動を実現して、特定の機能やタスクを完了することができる。関節モジュールは組立工業用ロボットのような各種の機械デバイスと装置に広く活用されており、ユースケースによって、異なる設計にし得る。構築された試験台を用いて設計された直交試験表により関節モジュール運転試験を行い、試験において異なる影響因子による関節モジュールの応答時間とオーバーシュート量等の関連データが取得され、データを整理することで予測モデルのトレーニングにデータセットを提供できると共に、分析することで異なる負荷と異なる運転速度でのシステムのオーバーシュート量と応答速度の関係を得ることができる。
【0010】
好ましくは、モデルが局所最適解に陥ることがあるという問題を解決するために、前記ステップS2における関節モジュール応答性能最適化の具体的なステップは以下の通りであり、
ステップS2.1において、MA-BPNNメイフライ-ニューラルネットワーク予測モデルを構築し、前記予測モデルはMAメイフライモデルとBPNN逆伝播ニューラルネットワークモデルを含み、MAメイフライモデルはBPNN逆伝播ニューラルネットワークモデルに最適化後の重みと閾値を提供し、
ステップS2.2において、MA-BPNNメイフライ-ニューラルネットワーク予測モデルをトレーニングし、まず、ステップS1.2で取得した関節モジュール応答性能データセットをモデルに導入し、メイフライ個体群の数が最初にNであり、続いて、オスとメスメイフライの位置を更新し、オスとメスメイフライの適応度値を計算し、続いて、反復して子のメイフライを生成して子のメイフライの位置を更新し、子のメイフライの適応度値がF
v
より小さくなると、反復を終了し、そうでなければ、子のメイフライを生成し続けて反復し、
メイフライが生成したグローバル最適パラメータをニューラルネットワークモデルの重みと閾値として、予測を行い、誤差を計算し、反復後の誤差がE
u
より小さくなると、オーバーシュート量O
shoot
と応答時間R
time
の予測結果を出力し、MA-BPNN予測モデルのトレーニングが完了する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
江蘇科技大学
深海浮力採鉱システム
17日前
江蘇科技大学
ロボット関節モジュール制御システムの最適化方法
10日前
江蘇科技大学
遺伝性心疾患の遺伝子支援診断システムの動作方法
9か月前
江蘇科技大学
プル型全回転推進器、その制御システム及び制御方法
2か月前
江蘇科技大学
多孔質媒体の流量特性パラメータの測定装置および方法
9か月前
江蘇科技大学
深海魚の浮き袋のバイオニック吸引バケットの基礎及びその作業方法
1か月前
江蘇科技大学
土壌のある点での熱伝導係数のための貫入式その場測定装置及び測定方法
13日前
江蘇科技大学
陰極と陽極の再循環に基づくSOFC/GT/SCO2ハイブリッドシステム
5か月前
江蘇科技大学
レーザークラッディング再製造のための合金組成物及び合金コーティングの製造方法
11日前
江蘇科技大学
曲げ可能で高い光電変換効率を有するシリコンへテロ接合太陽電池及びその製造方法
2か月前
株式会社ザイテック
吸着装置
24日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
13日前
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
搬送装置
17日前
個人
ペグハンマおよびペグハンマ用部品
17日前
住友重機械工業株式会社
教示装置
10日前
川崎重工業株式会社
ロボット
11日前
工機ホールディングス株式会社
作業機
10日前
学校法人五島育英会
アーム機構
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
10日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
17日前
住友重機械工業株式会社
支援装置
17日前
アピュアン株式会社
衝撃工具
19日前
ホシデン株式会社
分解用治具
17日前
株式会社マキタ
電気機器
11日前
株式会社スター精機
産業用ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社リコー
多関節ロボット
17日前
工機ホールディングス株式会社
作業機
13日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ