TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105149
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023223488
出願日
2023-12-28
発明の名称
モータ
出願人
株式会社エクセディ
代理人
弁理士法人新樹グローバル・アイピー
主分類
H02K
15/165 20250101AFI20250703BHJP(電力の発電,変換,配電)
要約
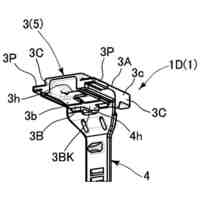
【課題】バランスウェイトがロータフレームから外れることを防止する。
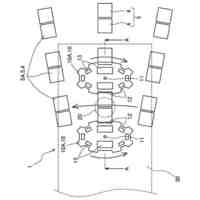
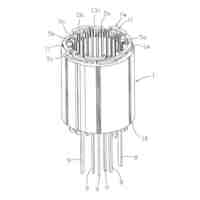
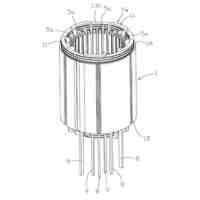
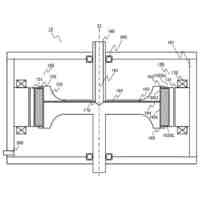
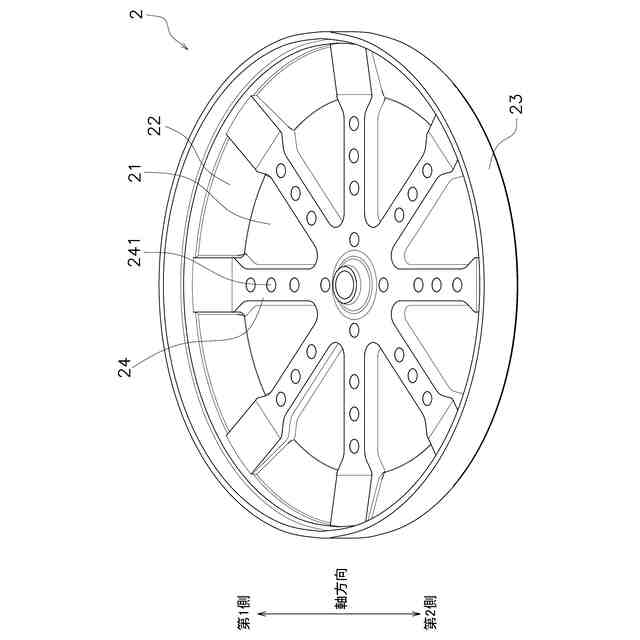
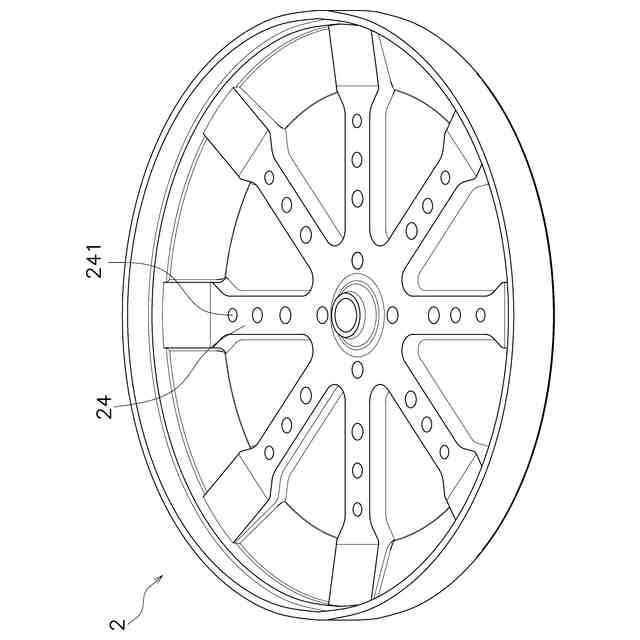
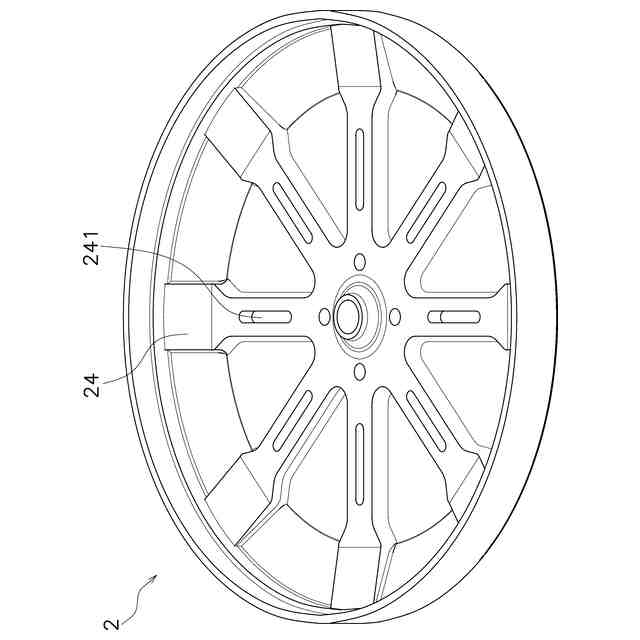
【解決手段】モータは、ロータフレーム、ロータ、及びステータを備える。ロータフレームは、複数のリブを有する。複数のリブの各々が少なくとも一つの収容穴を含む。各リブは、周方向において互いに間隔をあけて配置される、各リブは、径方向に延びる。ロータは、ロータフレームに支持される。ロータは環状である。ステータは、ロータに対して径方向内側に配置される。
【選択図】図1
特許請求の範囲
【請求項1】
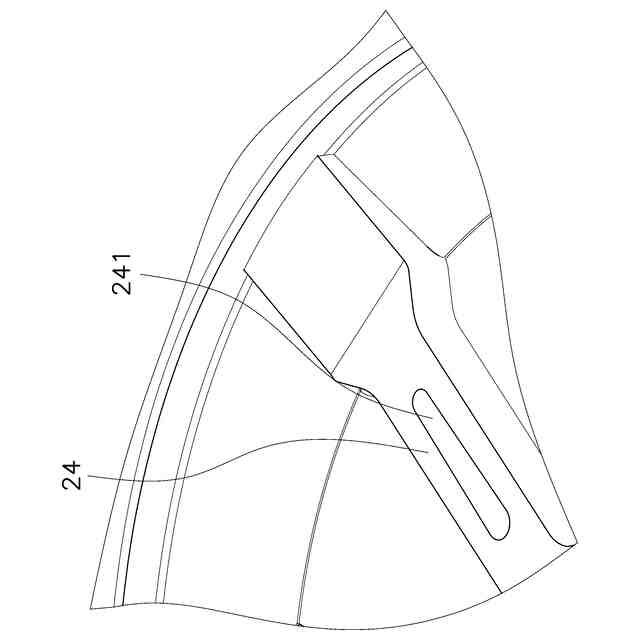
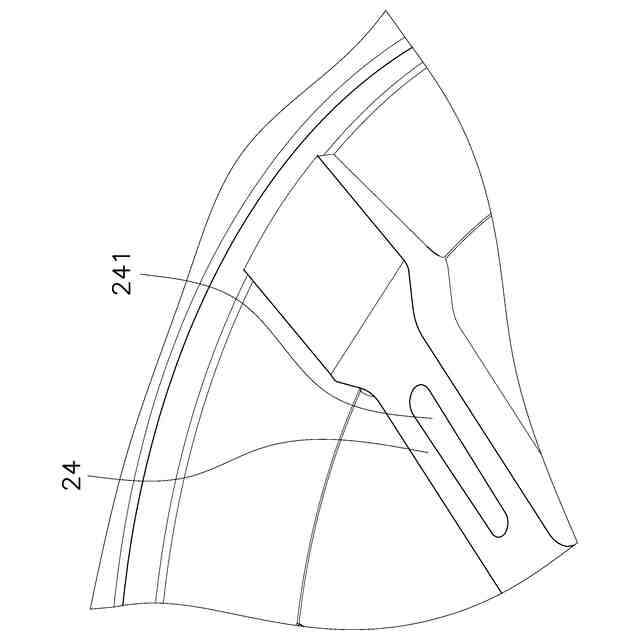
各々が少なくとも一つの収容穴を含み且つ周方向において互いに間隔をあけて配置されて径方向に延びる複数のリブ、を有するロータフレームと、
前記ロータフレームに支持される環状のロータと、
前記ロータに対して径方向内側に配置されるステータと、
を備える、モータ。
続きを表示(約 590 文字)
【請求項2】
前記複数の収容穴のうち、少なくとも一つの収容穴内に配置される少なくとも一つのバランスウェイト、
をさらに備える、請求項1に記載のモータ。
【請求項3】
前記複数のリブの各々は、径方向において互いに間隔をあけて配置される複数の前記収容穴を有する、
請求項1に記載のモータ。
【請求項4】
前記複数の収容穴は、互いに開口面積が異なる、
請求項3に記載のモータ。
【請求項5】
前記複数の収容穴は、径方向外側のものほど開口面積が小さい、
請求項3に記載のモータ。
【請求項6】
前記複数の収容穴は、径方向外側のものほど開口面積が大きい、
請求項3に記載のモータ。
【請求項7】
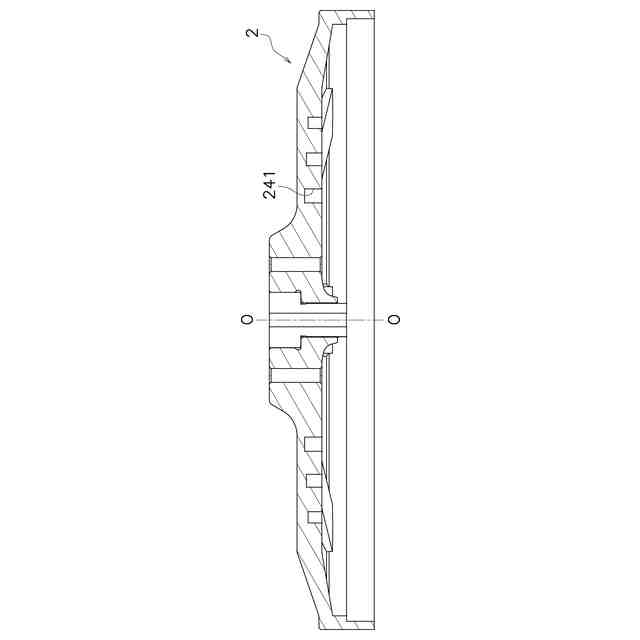
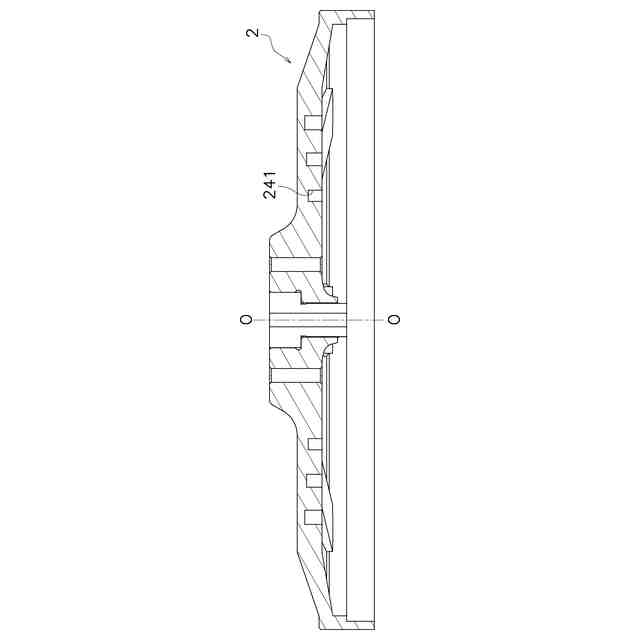
前記複数の収容穴は、互いに深さが異なる、
請求項3に記載のモータ。
【請求項8】
前記複数の収容穴は、径方向外側のものほど深さが浅い、
請求項3に記載のモータ。
【請求項9】
前記複数の収容穴は、径方向外側のものほど深さが深い、
請求項3に記載のモータ。
【請求項10】
前記各収容穴は、径方向に延びる長穴である、
請求項1に記載のモータ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータに関するものである。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
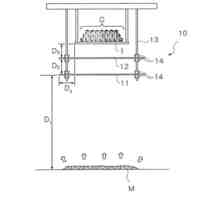
近年、ドローンが普及し始めている。一般的にドローンは、本体部と、本体部から放射状に延びる複数のアームと、各アームの先端に取り付けられるモータとを有している。モータは、プロペラを回転させる。このモータは、ロータを支持するロータフレームを有しており、ロータ及びロータフレームが回転する(特許文献1参照)。
【0003】
ロータ及びロータフレームは、部品精度又は組立精度に依存したアンバランスが発生し得るため、バランス修正用のウェイト(バランスウェイト)がロータフレームに接着されている。
【先行技術文献】
【特許文献】
【0004】
米国特許出願公開第2019/0181701号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
ロータ及びロータフレームが回転すると、バランスウェイトが遠心力によってロータフレームから外れてしまうという問題がある。そこで、本発明の課題は、バランスウェイトがロータフレームから外れることを防止することにある。
【課題を解決するための手段】
【0006】
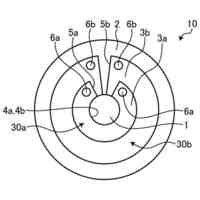
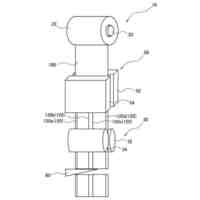
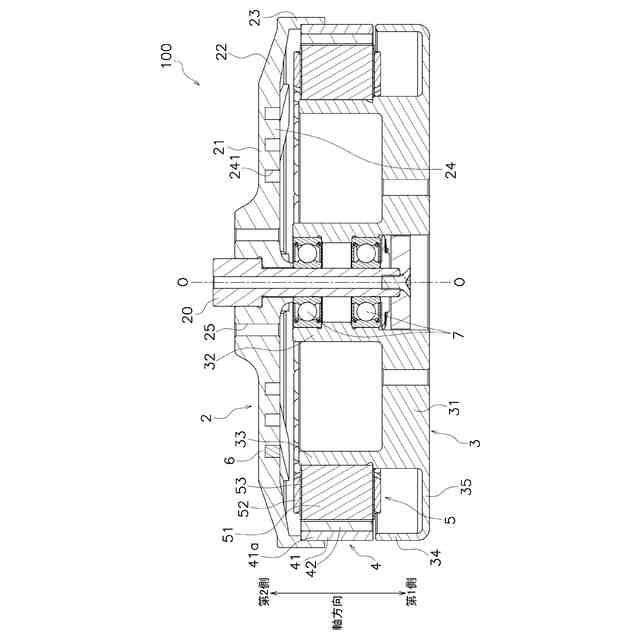
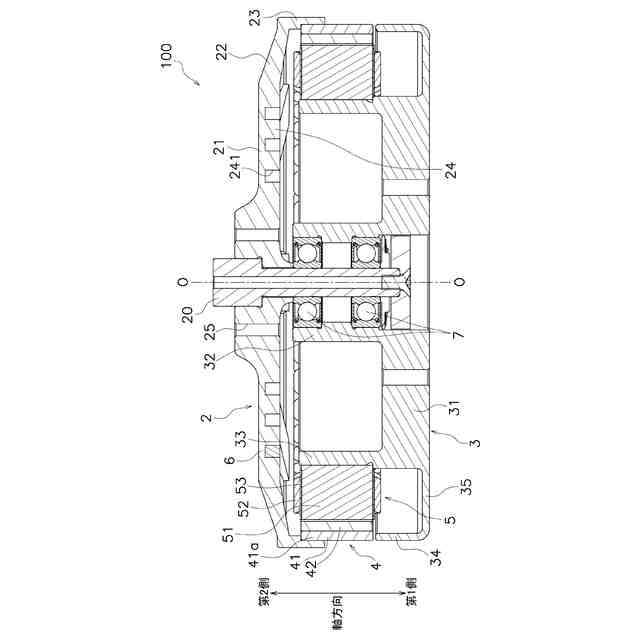
第1態様に係るモータは、ロータフレーム、ロータ、及びステータを備える。ロータフレームは、複数のリブを有する。複数のリブの各々が少なくとも一つの収容穴を含む。各リブは、周方向において互いに間隔をあけて配置される、各リブは、径方向に延びる。ロータは、ロータフレームに支持される。ロータは環状である。ステータは、ロータに対して径方向内側に配置される。
【0007】
この構成によれば、各リブに収容穴が形成されているため、バランスウェイトをその収容穴内に配置することで、バランスウェイトをロータフレームに強固に取り付けることができる。この結果、バランスウェイトがロータフレームから外れることを防止することができる。
【0008】
第2態様に係るモータは、第1態様に係るモータにおいて、少なくとも一つのバランスウェイトをさらに備える。少なくとも一つのバランスウェイトは、複数の収容穴のうち、少なくとも一つの収容穴内に配置される。
【0009】
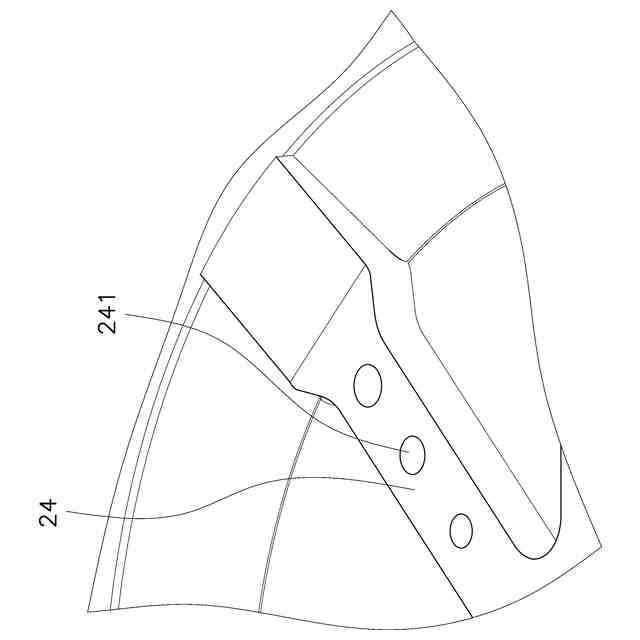
第3態様に係るモータは、第1又は第2態様に係るモータにおいて、次のように構成される。複数のリブの各々は、径方向において互いに間隔をあけて配置される複数の収容穴を有する。
【0010】
第4態様に係るモータは、第3態様に係るモータにおいて、次のように構成される。複数の収容穴は、互いに開口面積が異なる。詳細には、1つのリブが有する複数の収容穴が、互いに開口面積が異なる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
恒久電源開発の装置
24日前
キヤノン株式会社
電源装置
17日前
個人
ステッピングモータ実習装置
3日前
株式会社竹中工務店
避雷設備
17日前
ダイハツ工業株式会社
溶接装置
24日前
トヨタ自動車株式会社
充電方法
10日前
サンデン株式会社
モータ制御装置
24日前
愛知電機株式会社
ステータおよびモータ
24日前
愛知電機株式会社
ステータおよびモータ
24日前
愛知電機株式会社
ステータおよびモータ
24日前
新電元工業株式会社
充電装置
10日前
株式会社エスイー
上載物の支持装置
17日前
AGC株式会社
太陽電池モジュール
17日前
因幡電機産業株式会社
充電システム
24日前
三菱電機株式会社
回転子および電動機
17日前
住友金属鉱山株式会社
遮熱装置
11日前
ダイハツ工業株式会社
絶縁紙成型装置
20日前
住友重機械工業株式会社
回転電機
20日前
株式会社IJTT
オイル冷却装置
24日前
株式会社ゲットクリーンエナジー
発電機
17日前
株式会社ジェイテクト
モータ装置
13日前
日産自動車株式会社
光電変換装置
17日前
スズキ株式会社
車両用モータ構造
24日前
ミネベアミツミ株式会社
回転機器
3日前
多摩川精機株式会社
逆起電圧可変モータ
19日前
ミネベアミツミ株式会社
回転機器
3日前
株式会社日立製作所
回転電機
3日前
ミネベアミツミ株式会社
回転機器
3日前
ミネベアミツミ株式会社
回転機器
3日前
ヤマハ発動機株式会社
電力変換装置
19日前
トヨタ自動車株式会社
充電システム
13日前
ヤマハ発動機株式会社
電力変換装置
19日前
トヨタ自動車株式会社
積層鋼板の製造方法
24日前
トヨタ自動車株式会社
積層鋼板の製造方法
19日前
ニチコン株式会社
電源回路
25日前
大和化成工業株式会社
結束部材
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ