TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025104443
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023222252
出願日
2023-12-28
発明の名称
制御システムおよび作業機械
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
3/43 20060101AFI20250703BHJP(水工;基礎;土砂の移送)
要約
【課題】自動制御において適切に分合流制御を行う。
【解決手段】制御装置は、本体および作業機の自動制御に係る複数のフェーズと、複数のフェーズの少なくとも1つの切り替わりに、分合流弁の切り替えが含まれる。
【選択図】図8
特許請求の範囲
【請求項1】
本体と、
前記本体に対し駆動する作業機と、
前記本体または前記作業機を駆動する複数のアクチュエータと、
前記複数のアクチュエータに流体を供給する複数の流体ポンプと、
前記複数の流体ポンプそれぞれと前記複数のアクチュエータのうちそれぞれの流体ポンプに対応するアクチュエータとを接続する複数の流路と、前記複数の流路を選択的に接続する分合流弁とを含んで構成される流体回路と、
を備える作業機械の制御システムであって、
前記本体または前記作業機の動作信号に基づいて、前記分合流弁および前記流体ポンプの流量を調整し、
前記本体および前記作業機の所定の動作を実行させる自動制御に係る複数のフェーズと、前記複数のフェーズの少なくとも1つの切り替わりに前記分合流弁の切り替えが含まれる
制御システム。
続きを表示(約 1,400 文字)
【請求項2】
検出された前記作業機の動作から特定されるフェーズに基づき前記複数のアクチュエータおよび前記分合流弁の制御信号を出力する
請求項1に記載の制御システム。
【請求項3】
前記複数のフェーズは、少なくとも前記作業機を駆動させる第一フェーズと、前記作業機を駆動させず前記本体を駆動させる第二フェーズとを含み、
前記第一フェーズから前記第二フェーズに切り替わるときに前記前記分合流弁を切り替える制御信号を出力する
請求項2に記載の制御システム。
【請求項4】
前記本体は下部走行体と、上部旋回体とを含み、
前記複数のアクチュエータは、前記下部走行体に対する前記上部旋回体の駆動を行う旋回モータを含む
請求項1に記載の制御システム。
【請求項5】
前記本体は下部走行体を含み、
前記複数のアクチュエータは、前記下部走行体の駆動を行う走行モータを含む
請求項1に記載の制御システム。
【請求項6】
前記複数のフェーズは、前記走行モータを駆動させる第三フェーズを含み、
前記第三フェーズにおいて前記分合流弁に前記複数の流路を分離させる
請求項5に記載の制御システム。
【請求項7】
本体と、
前記本体に対し駆動する作業機と、
前記本体または前記作業機を駆動する複数のアクチュエータと、
前記複数のアクチュエータに流体を供給する複数の流体ポンプと、
前記複数の流体ポンプそれぞれと前記複数のアクチュエータのうちそれぞれの流体ポンプに対応するアクチュエータとを接続する複数の流路と、前記複数の流路を選択的に接続する分合流弁とを含んで構成される流体回路と、
を備える作業機械の制御システムであって、
前記本体または前記作業機の動作信号に基づいて、前記分合流弁および前記流体ポンプの流量を調整し、
前記本体及び前記作業機の自動制御に係る複数のフェーズの少なくとも1つの切り替わりにおいて、前記分合流弁を閉じる制御信号を出力する
制御システム。
【請求項8】
前記複数のフェーズは、少なくとも前記作業機を駆動させる第一フェーズと、前記作業機を駆動させず前記本体を駆動させる第二フェーズとを含み、
前記第一フェーズから前記第二フェーズに切り替わるときに前記前記分合流弁を閉じる制御信号を出力する
請求項7に記載の制御システム。
【請求項9】
前記第一フェーズにおいて、前記作業機の姿勢に基づいて前記分合流弁を閉じるか否かを判定する
請求項8に記載の制御システム。
【請求項10】
本体と、
前記本体に対し駆動する作業機と、
前記本体または前記作業機を駆動する複数のアクチュエータと、
前記複数のアクチュエータに流体を供給する複数の流体ポンプと、
前記複数の流体ポンプそれぞれと前記複数のアクチュエータのうちそれぞれの流体ポンプに対応するアクチュエータとを接続する複数の流路と、前記複数の流路を選択的に接続する分合流弁とを含んで構成される流体回路と、
請求項1から請求項8の何れか1項に記載の制御システムと、
を備える作業機械。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御システムおよび作業機械に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、第1油圧ポンプから吐出された作動油と第2油圧ポンプから吐出された作動油とが合流する合流状態と合流しない分流状態とを切り替える分合流弁を有する油圧制御装置が記載されている。特許文献1に記載の油圧制御装置は、操作レバーの操作パターンに応じて合流状態と分流状態とを切り替える。
【先行技術文献】
【特許文献】
【0003】
国際公開第2006/123704号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、作業機械における掘削位置と積込位置との間の作業機の移動を自動化する技術が研究されている。このような自動制御においては、分合流弁の制御が適切に働かない可能性がある。
本開示の目的は、作業機械の自動制御において適切に分合流制御を行うことができる制御システムおよび作業機械を提供することにある。
【課題を解決するための手段】
【0005】
本開示の第1の態様によれば、制御システムは、本体と、前記本体に対し駆動する作業機と、前記本体または前記作業機を駆動する複数のアクチュエータと、前記複数のアクチュエータに流体を供給する複数の流体ポンプと、前記複数の流体ポンプそれぞれと前記複数のアクチュエータのうちそれぞれの流体ポンプに対応するアクチュエータとを接続する複数の流路と、前記複数の流路を選択的に接続する分合流弁とを含んで構成される流体回路と、を備える作業機械の制御システムであって、前記本体または前記作業機の動作信号に基づいて、前記分合流弁および前記流体ポンプの流量を調整し、前記本体および前記作業機の所定の動作を実行させる自動制御に係る複数のフェーズと、前記複数のフェーズの少なくとも1つの切り替わりに前記分合流弁の切り替えが含まれる。
【0006】
本開示の第2の態様によれば、作業システムは、本体と、前記本体に対し駆動する作業機と、前記本体または前記作業機を駆動する複数のアクチュエータと、前記複数のアクチュエータに流体を供給する複数の流体ポンプと、前記複数の流体ポンプそれぞれと前記複数のアクチュエータのうちそれぞれの流体ポンプに対応するアクチュエータとを接続する複数の流路と、前記複数の流路を選択的に接続する分合流弁とを含んで構成される流体回路と、を備える作業機械の制御システムであって、前記本体または前記作業機の動作信号に基づいて、前記分合流弁および前記流体ポンプの流量を調整し、前記本体及び前記作業機の自動制御に係る複数のフェーズの少なくとも1つの切り替わりにおいて、前記分合流弁を閉じる制御信号を出力する。
【発明の効果】
【0007】
上記態様に係る作業機械は、自動制御において適切に分合流制御を行うことができる。
【図面の簡単な説明】
【0008】
第一実施形態に係る作業機械の構成を示す概略図である。
第一実施形態に係る油圧システムの構成を示すブロック図である。
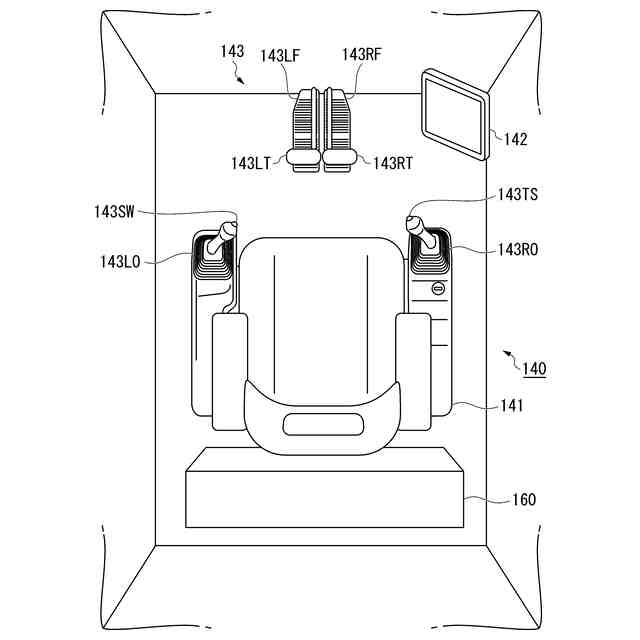
第一実施形態に係る運転室の内部の構成を示す図である。
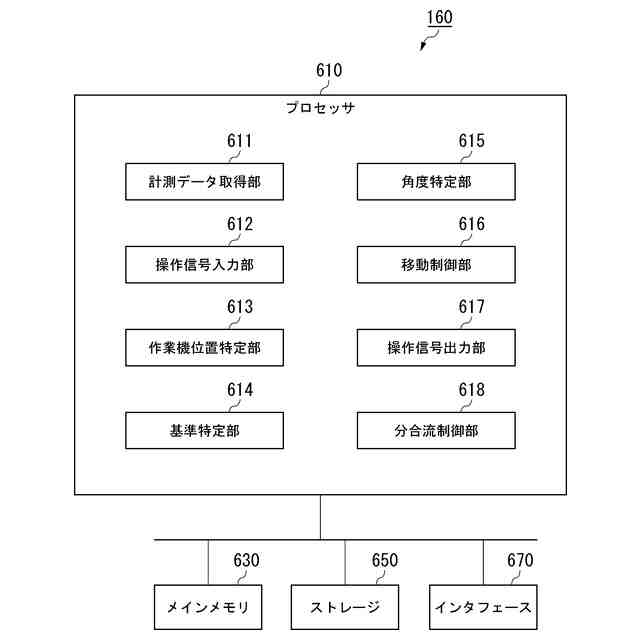
第一実施形態に係る制御装置の構成を示す概略ブロック図である。
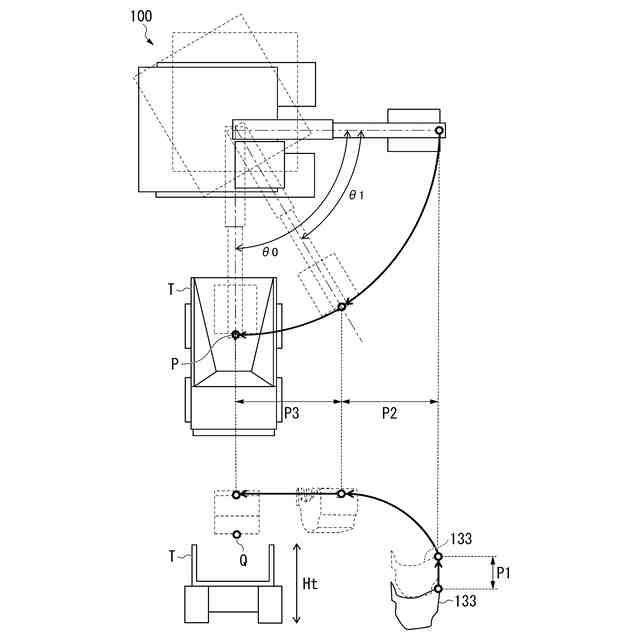
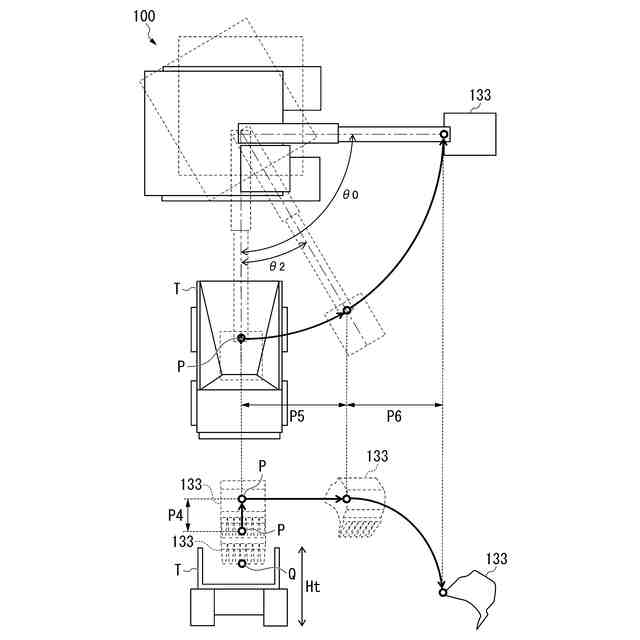
第一実施形態に係る第一旋回における作業機械の動きの例を示す図である。
第一実施形態に係る第二旋回における作業機械の動きの例を示す図である。
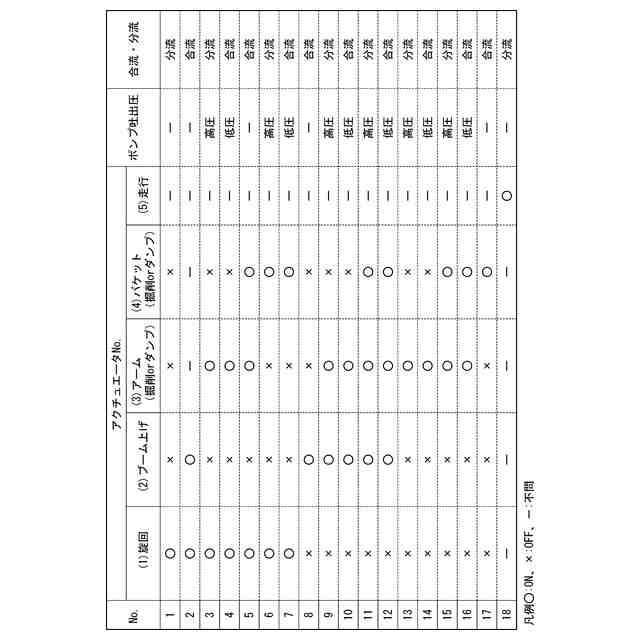
第一実施形態に係る操作パターンと分合流制御との関係を示すテーブルの例である。
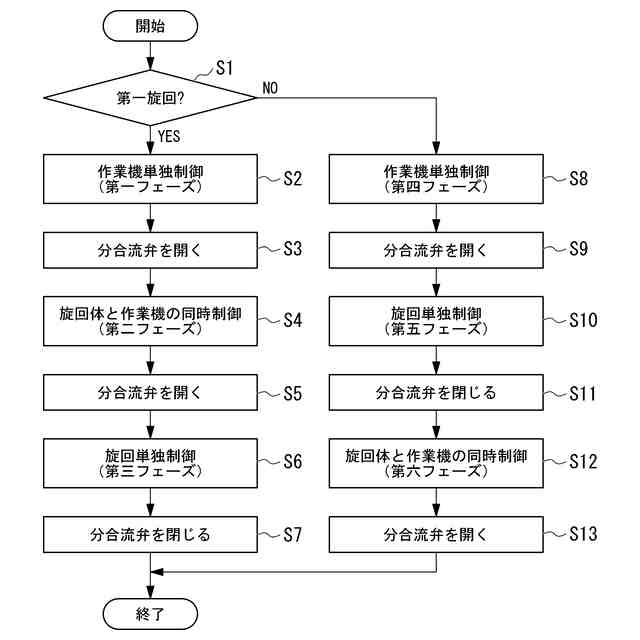
第一実施形態に係る制御装置による自動制御を示すフローチャートである。
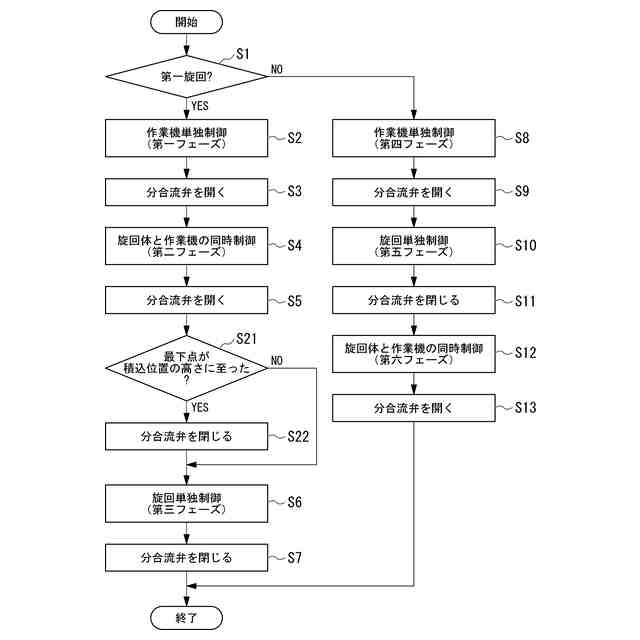
第二実施形態に係る制御装置の動作を示すフローチャートである。
【発明を実施するための形態】
【0009】
〈第一実施形態〉
以下、図面を参照しながら実施形態について詳しく説明する。
【0010】
《作業機械100の構成》
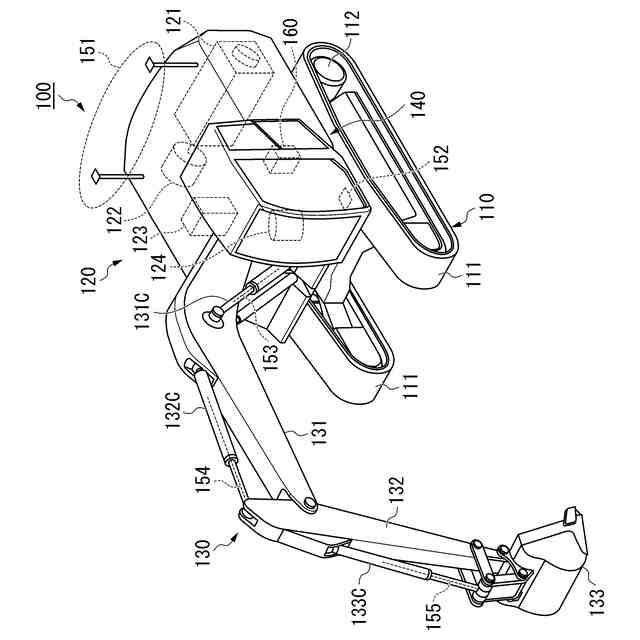
図1は、第一実施形態に係る作業機械100の構成を示す概略図である。
作業機械100は、施工現場にて稼働し、土砂などの施工対象を掘削し、荷としてダンプトラックなどの積込対象Tのベッセルなど荷台に積み込む。作業機械100の例としては、フェイスショベル、バックホウショベル、ロープショベルなどが挙げられる。また作業機械100は電動駆動するものであってもよいし、油圧駆動するものであってもよい。第一実施形態に係る作業機械100は、バックホウショベルである。作業機械100は、走行体110、旋回体120、作業機130及び運転室140を備える。積込対象Tの例としては、ダンプトラック、ホッパなどが挙げられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ