TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101764
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023218726
出願日
2023-12-26
発明の名称
情報処理装置、情報処理方法および情報処理プログラム
出願人
三菱電機株式会社
代理人
弁理士法人山王内外特許事務所
主分類
G08G
1/16 20060101AFI20250701BHJP(信号)
要約
【課題】従来に対し、ドライバが自車両の行動計画の意図を理解することを支援可能とする。
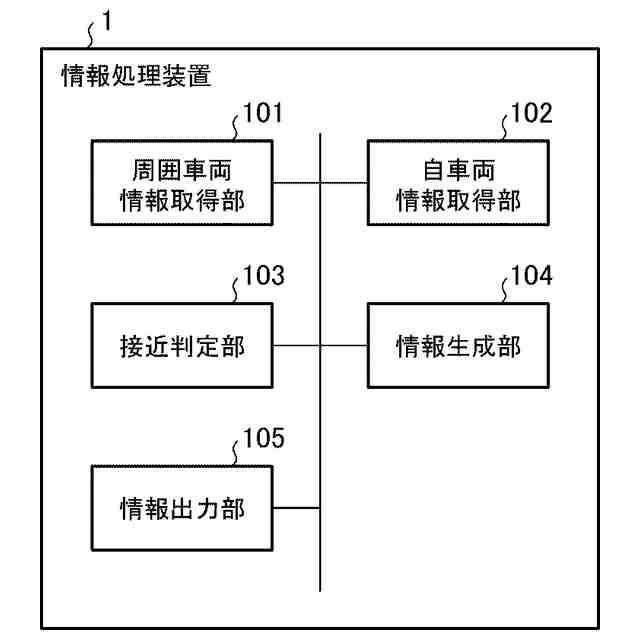
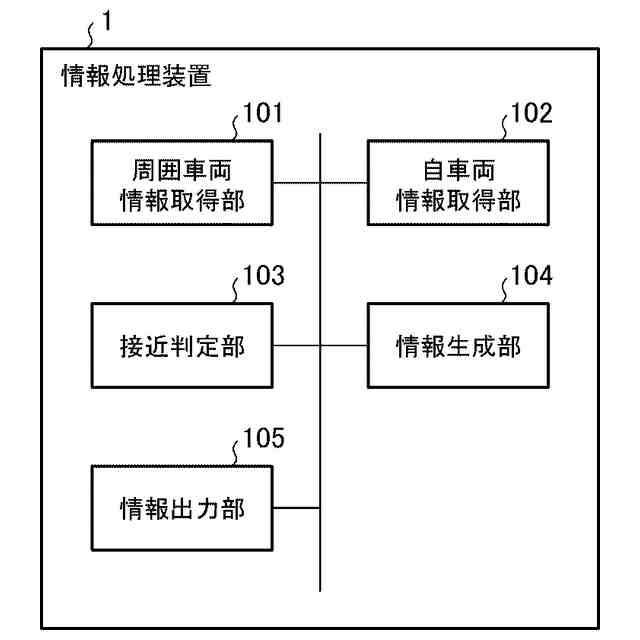
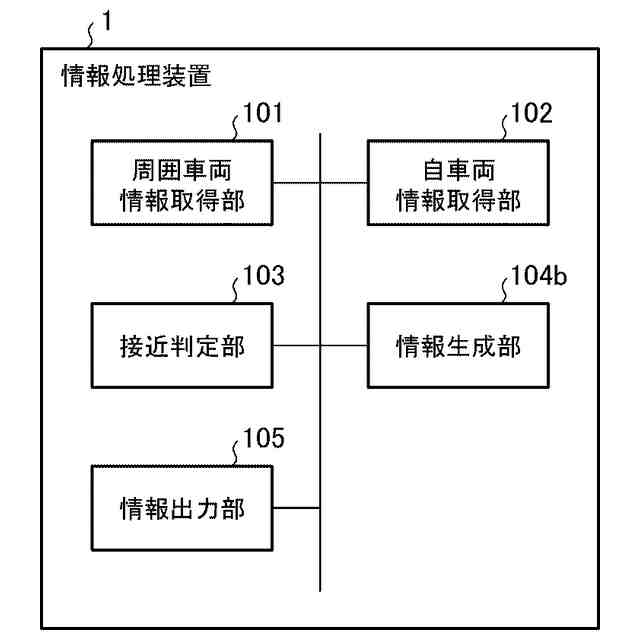
【解決手段】周囲車両の行動予測に関する情報を取得する周囲車両情報取得部101と、自車両の行動計画に関する情報を取得する自車両情報取得部102と、周囲車両情報取得部101により取得された情報および自車両情報取得部102により取得された情報に基づいて、周囲車両が自車両に対して一定距離内に接近する可能性があるかを判定する接近判定部103と、接近判定部103により周囲車両が自車両に対して一定距離内に接近する可能性があると判定された場合に、当該接近の可能性の有無を示す情報を生成する情報生成部104とを備えた。
【選択図】図1
特許請求の範囲
【請求項1】
周囲車両の行動予測に関する情報を取得する周囲車両情報取得部と、
自車両の行動計画に関する情報を取得する自車両情報取得部と、
前記周囲車両情報取得部により取得された情報および前記自車両情報取得部により取得された情報に基づいて、周囲車両が自車両に対して一定距離内に接近する可能性があるかを判定する接近判定部と、
前記接近判定部により周囲車両が自車両に対して一定距離内に接近する可能性があると判定された場合に、当該接近の可能性の有無を示す情報を生成する情報生成部と
を備えた情報処理装置。
続きを表示(約 1,400 文字)
【請求項2】
前記情報生成部は、接近の可能性の有無を示す情報として、前記周囲車両情報取得部により取得された情報および前記自車両情報取得部により取得された情報に基づいて、自車両の計画経路のうち、当該周辺車両の予測経路と当該自車両の計画経路とが重なる地点から一定の時間または距離だけ遡った地点までの距離に関する情報を生成する
ことを特徴とする請求項1記載の情報処理装置。
【請求項3】
前記情報生成部は、接近の可能性の有無を示す情報として、当該接近の可能性の有無を示すマークに関する情報を生成する
ことを特徴とする請求項1記載の情報処理装置。
【請求項4】
前記情報生成部は、接近の可能性の有無を示す情報として、当該接近の可能性の有無を示す色に関する情報を生成する
ことを特徴とする請求項1記載の情報処理装置。
【請求項5】
前記情報生成部は、前記周囲車両情報取得部により取得された情報および前記自車両情報取得部により取得された情報に基づいて、周囲車両の現在位置と所定時間経過後の位置とを結んだ線分、および、自車両の現在位置と所定時間経過後の位置とを結んだ線分に関する情報を生成する
ことを特徴とする請求項1記載の情報処理装置。
【請求項6】
前記情報生成部は、前記周囲車両情報取得部により取得された情報および前記自車両情報取得部により取得された情報に基づいて、周囲車両の現在の加速度制御を示すマーク、および、自車両の現在の加速度制御を示すマークに関する情報を生成する
ことを特徴とする請求項1記載の情報処理装置。
【請求項7】
前記情報生成部は、前記周囲車両情報取得部により取得された情報および前記自車両情報取得部により取得された情報に基づいて、自車両の走行レーン上における、周囲車両の予測経路と当該自車両の計画経路とが重なる位置に、接近の可能性の有無を示す情報を表示するための表示情報を生成する
ことを特徴とする請求項1記載の情報処理装置。
【請求項8】
前記情報生成部は、前記周囲車両情報取得部により取得された情報および前記自車両情報取得部により取得された情報に基づいて、自車両の走行レーン上における、周囲車両の予測経路と当該自車両の計画経路とが重なる位置に、接近の可能性の有無を示す情報をマス目状に表示するための表示情報を生成する
ことを特徴とする請求項1記載の情報処理装置。
【請求項9】
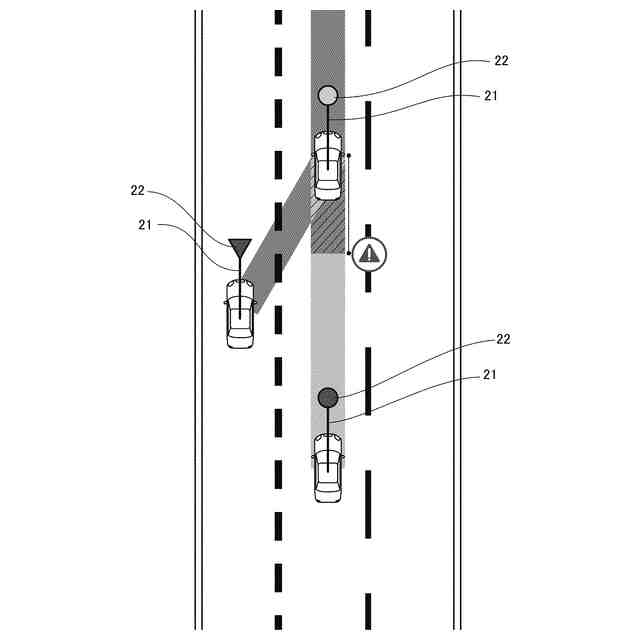
前記情報生成部は、接近の可能性の有無を示す情報として、前記周囲車両情報取得部により取得された情報および前記自車両情報取得部により取得された情報に基づいて、周囲車両と自車両との接近度合いを、車両ごとの円の重なりおよび色によって表示するための表示情報を生成する
ことを特徴とする請求項1記載の情報処理装置。
【請求項10】
前記接近判定部は、前記周囲車両情報取得部により取得された情報および前記自車両情報取得部により取得された情報に基づいて、周囲車両が合流または割込みを行う可能性のある周囲車両であり、当該周囲車両が自車両に対して一定距離内に接近する可能性があるかを判定する
ことを特徴とする請求項1記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理装置、情報処理方法および情報処理プログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
AD(Autonomous Driving)機器またはADAS(Advanced Driver-Assistance Systems)機器を搭載した車両において、ドライバが自車両の行動計画の意図を理解するためには、周囲車両の行動予測を確認することが望ましい。
【0003】
例えば、特許文献1に記載の従来技術では、自車および他車の任意の予測到達位置に車両の表示形態を示した上で、最も接近度が高くなる時刻での双方の予測到達位置マークの強調表示、双方の予測経路の表示、および、双方の予測経路の上下での立体的な表示をそれぞれ可能としている。
【先行技術文献】
【特許文献】
【0004】
特開2007-333502号
【発明の概要】
【発明が解決しようとする課題】
【0005】
このように、従来技術では、ドライバは、車両が接近すること、および、そのタイミングを理解することはできる。しかしながら、従来技術では、ドライバが自車両の行動計画の意図を十分に理解することができない場合がある。
【0006】
例えば、従来技術では、周囲車両の前方での合流を予測しているが、自車両が減速制御しない場合に、ドライバはその理由がわからない。
また、例えば、従来技術では、周囲車両の割込みを予測しているが、自車両が減速制御しない場合に、ドライバはその理由がわからない。
【0007】
本開示は、上記のような課題を解決するためになされたもので、従来に対し、ドライバが自車両の行動計画の意図を理解することを支援可能となる情報処理装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
本開示に係る情報処理装置は、周囲車両の行動予測に関する情報を取得する周囲車両情報取得部と、自車両の行動計画に関する情報を取得する自車両情報取得部と、周囲車両情報取得部により取得された情報および自車両情報取得部により取得された情報に基づいて、周囲車両が自車両に対して一定距離内に接近する可能性があるかを判定する接近判定部と、接近判定部により周囲車両が自車両に対して一定距離内に接近する可能性があると判定された場合に、当該接近の可能性の有無を示す情報を生成する情報生成部とを備えたことを特徴とする。
【発明の効果】
【0009】
本開示によれば、上記のように構成したので、従来に対し、ドライバが自車両の行動計画の意図を理解することを支援可能となる。
【図面の簡単な説明】
【0010】
実施の形態1に係る情報処理装置の構成例を示すブロック図である。
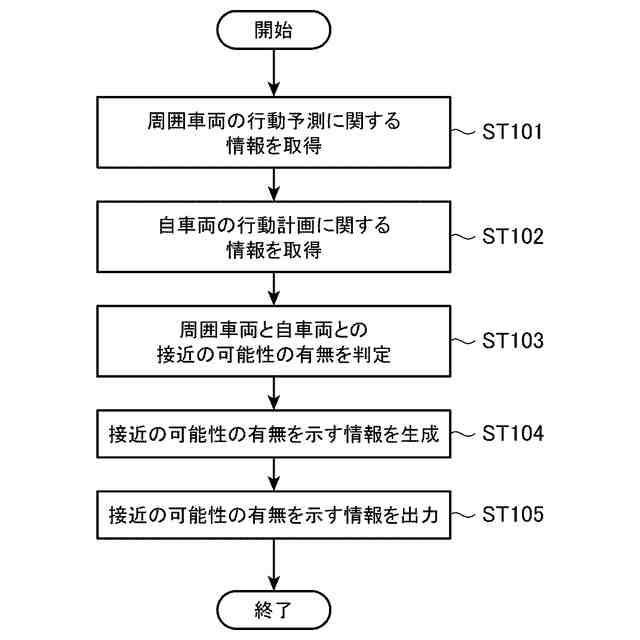
実施の形態1に係る情報処理装置の動作例を示すフローチャートである。
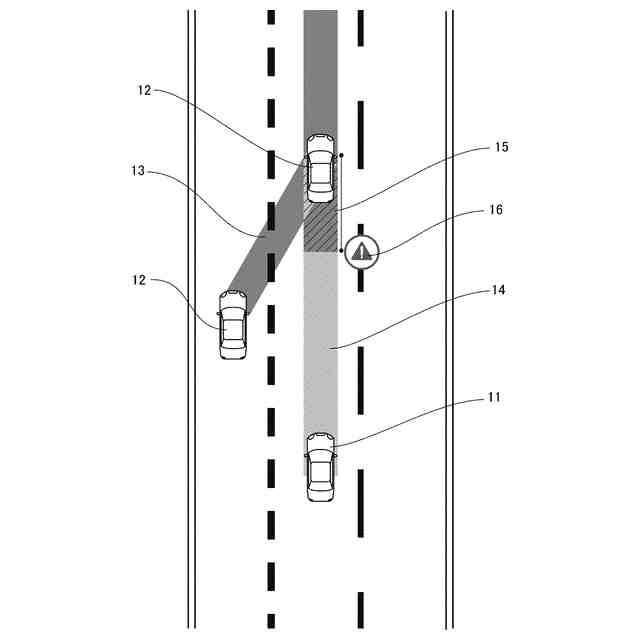
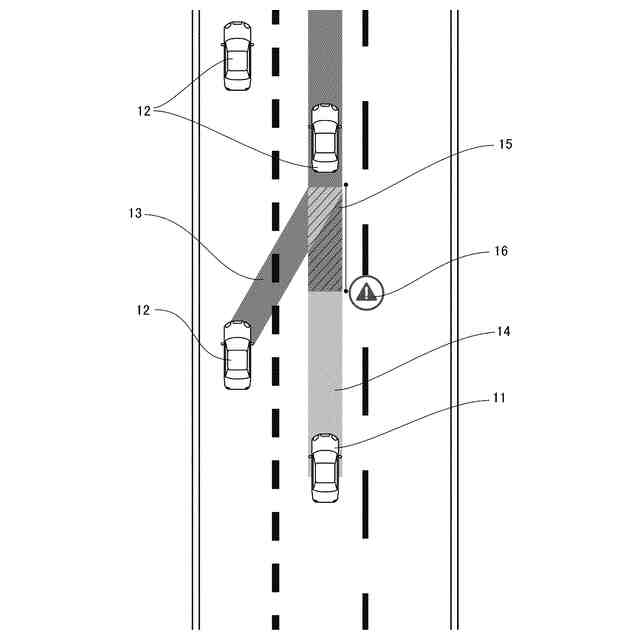
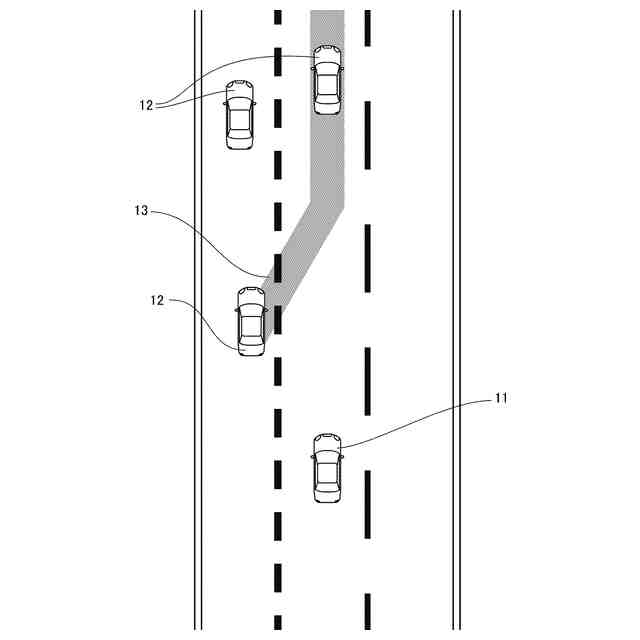
実施の形態1に係る情報処理装置の動作の具体例を示す図である。
実施の形態1に係る情報処理装置の動作の具体例を示す図である。
実施の形態1に係る情報処理装置の動作の具体例を示す図である。
実施の形態1に係る情報処理装置の動作の具体例を示す図である。
実施の形態2に係る情報処理装置の構成例を示すブロック図である。
実施の形態2に係る情報処理装置の動作の具体例を示す図である。
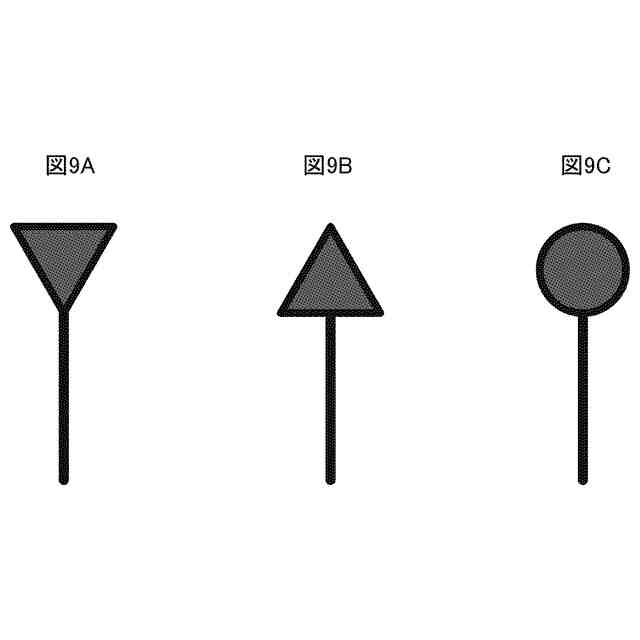
図9A~図9Cは、実施の形態2に係る情報処理装置で用いられる加速度制御を示すマークの一例を示す図であって、図9Aは減速制御の場合を示すマークであり、図9Bは加速制御の場合を示すマークであり、図9Cは等速制御の場合を示すマークである。
実施の形態3に係る情報処理装置の構成例を示すブロック図である。
実施の形態3に係る情報処理装置の動作の具体例を示す図である。
実施の形態3に係る情報処理装置で用いられる接近の可能性の有無を示す円弧の一例を示す図である。
実施の形態3に係る情報処理装置で用いられる接近の可能性の有無を示すマークの一例を示す図である。
実施の形態3に係る情報処理装置で用いられる加速度制御を示すマークの一例を示す図である。
実施の形態3に係る情報処理装置で用いられる速度メータの一例を示す図である。
実施の形態4に係る情報処理装置の構成例を示すブロック図である。
実施の形態4に係る情報処理装置の動作の具体例を示す図である。
実施の形態5に係る情報処理装置の構成例を示すブロック図である。
実施の形態5に係る情報処理装置の動作の具体例を示す図である。
図20A、図20Bは、実施の形態1~5に係る情報処理装置のハードウェア構成例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ