TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025101554
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023218475
出願日
2023-12-25
発明の名称
制御方法、及び、制御装置
出願人
パナソニックオートモーティブシステムズ株式会社
代理人
個人
主分類
H04N
7/18 20060101AFI20250630BHJP(電気通信技術)
要約
【課題】車両の実際の床下の状況とズレの少ない床下画像を生成する。
【解決手段】車両は、車両外の第1の領域を撮影した第1の撮影画像を送信する第1のカメラと、車両外の第2の領域を撮影した第2の撮影画像を送信する第2のカメラと、所定のタイミングで受信した第1の撮影画像又は第2の撮影画像を用いて、車両の床下が撮影された床下画像を生成する制御装置と、床下画像を表示する表示装置とを備え、所定のタイミングで受信した第1の撮影画像は第2の時刻に撮影されたものであり、所定のタイミングで受信した第2の撮影画像は第2の時刻よりも以前の第1の時刻に撮影されたものであり、制御装置は、車両が第1の領域の方向に移動している場合、第1の撮影画像を用いて、床下画像を生成し、車両が第2の領域の方向に移動している場合、第2の撮影画像を用いて、車両が第1の領域の方向に移動している場合と異なる方法で床下画像を生成する。
【選択図】図5
特許請求の範囲
【請求項1】
複数の車輪を備え、前記車輪を用いて所定の方向に移動可能な車両の制御方法であって、前記車両が、
前記車両外の第1の領域を撮影した第1の撮影画像を送信する第1のカメラと、
前記車両外の第2の領域を撮影した第2の撮影画像を送信する第2のカメラと、
所定のタイミングで受信した前記第1の撮影画像又は前記第2の撮影画像を用いて、前記車両の床下が撮影された床下画像を生成する制御装置と、
前記床下画像を表示する表示装置と、を備え、
前記所定のタイミングで受信した前記第1の撮影画像は、第2の時刻に撮影されたものであり、
前記所定のタイミングで受信した前記第2の撮影画像は、前記第2の時刻よりも以前の第1の時刻に撮影されたものであり、
前記制御装置が、
前記車両が前記第1の領域の方向に移動している場合、前記第1の撮影画像を用いて、前記床下画像を生成し、
前記車両が前記第2の領域の方向に移動している場合、前記第2の撮影画像を用いて、前記車両が前記第1の領域の方向に移動している場合と異なる方法で前記床下画像を生成する、制御方法。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載の制御方法であって、
前記第1のカメラは、前方カメラであり、
前記第1の領域は、前記車両の前方の領域であり、
前記第1の領域の方向は、前記車両の前進方向であり、
前記第1の撮影画像は、前方撮影画像であり、
前記第2のカメラは、後方カメラであり、
前記第2の領域は、前記車両の後方の領域であり、
前記第2の領域の方向は、前記車両の後退方向であり、
前記第2の撮影画像は、後方撮影画像である、制御方法。
【請求項3】
請求項2に記載の制御方法であって、
前記制御装置が、
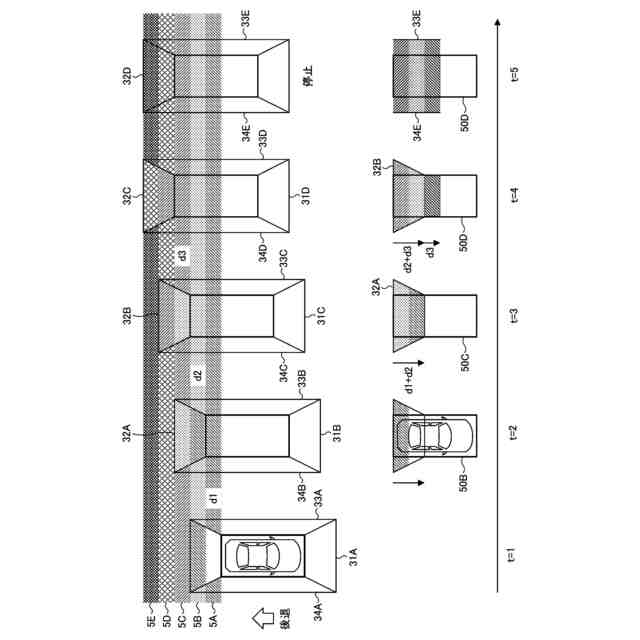
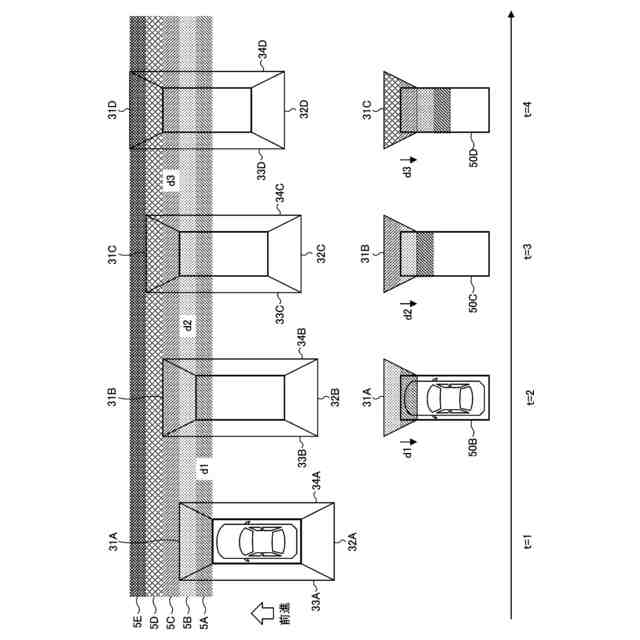
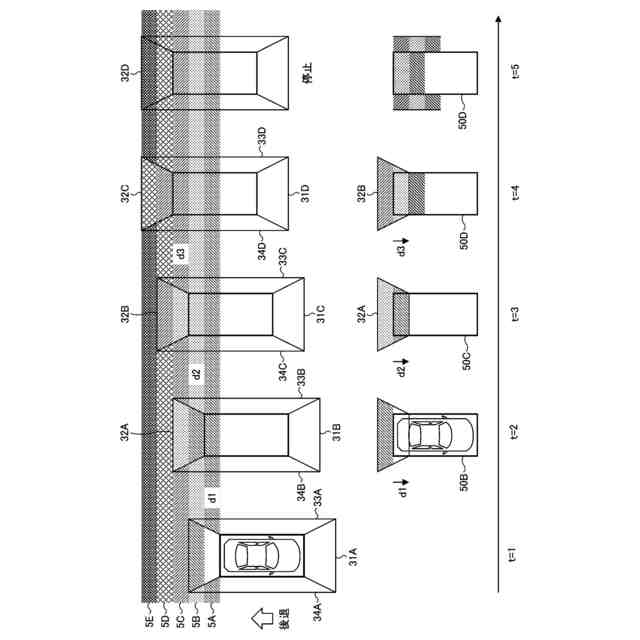
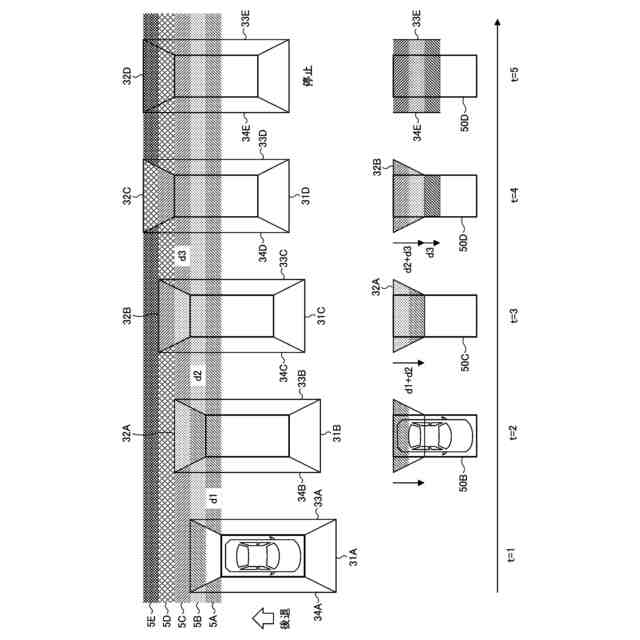
前記車両が前進方向に移動している場合、前記第2の時刻から、当該第2の時刻よりも後の第3の時刻までの間の前記車両の移動量に基づいて、前記前方撮影画像を前記車両の後方にシフトさせ、前記第3の時刻における前記床下画像を生成し、
前記車両が後退方向に移動している場合、前記第1の時刻から前記第3の時刻までの前記車両の移動量に基づいて、前記後方撮影画像を前記車両の前方にシフトさせ、前記第3の時刻における前記床下画像を生成する、制御方法。
【請求項4】
請求項3に記載の制御方法であって、
前記車両は、
前記車両の左側の領域を撮影した左側撮影画像を送信する左側カメラと、
前記車両の右側の領域を撮影した右側撮影画像を送信する右側カメラと、をさらに備え、
前記制御装置が、前記第3の時刻に撮影された前記左側撮影画像及び前記右側撮影画像と、前記第3の時刻における前記床下画像とを共に前記表示装置に表示する、制御方法。
【請求項5】
請求項3に記載の制御方法であって、
前記第1の時刻、前記第2の時刻及び前記第3の時刻における間隔は、前記前方カメラ及び前記後方カメラの撮影間隔に基づく、制御方法。
【請求項6】
請求項1に記載の制御方法であって、
前記第2のカメラが、前記第2の撮影画像に対して所定の処理を行った後、前記第2の撮影画像を送信する、制御方法。
【請求項7】
請求項6に記載の制御方法であって、
前記所定の処理は、前記第2の撮影画像から人物を検出する処理である、制御方法。
【請求項8】
複数の車輪を備え、前記車輪を用いて所定の方向に移動可能な車両が備える制御装置であって、前記車両が、
前記車両外の第1の領域を撮影した第1の撮影画像を送信する第1のカメラと、
前記車両外の第2の領域を撮影した第2の撮影画像を送信する第2のカメラと、
所定のタイミングで受信した前記第1の撮影画像又は前記第2の撮影画像を用いて、前記車両の床下が撮影された床下画像を生成する前記制御装置と、
前記床下画像を表示する表示装置と、を備え、
前記所定のタイミングで受信した前記第1の撮影画像は、第2の時刻に撮影されたものであり、
前記所定のタイミングで受信した前記第2の撮影画像は、前記第2の時刻よりも以前の第1の時刻に撮影されたものであり、
前記制御装置は、
前記車両が前記第1の領域の方向に移動している場合、前記第1の撮影画像を用いて、前記床下画像を生成し、
前記車両が前記第2の領域の方向に移動している場合、前記第2の撮影画像を用いて、前記車両が前記第1の領域の方向に移動している場合と異なる方法で前記床下画像を生成する、制御装置。
【請求項9】
請求項8に記載の制御装置であって、
前記第1のカメラは、前方カメラであり、
前記第1の領域は、前記車両の前方の領域であり、
前記第1の領域の方向は、前記車両の前進方向であり、
前記第1の撮影画像は、前方撮影画像であり、
前記第2のカメラは、後方カメラであり、
前記第2の領域は、前記車両の後方の領域であり、
前記第2の領域の方向は、前記車両の後退方向であり、
前記第2の撮影画像は、後方撮影画像である、制御装置。
【請求項10】
請求項9に記載の制御装置であって、
前記制御装置は、
前記車両が前進方向に移動している場合、前記第2の時刻から、当該第2の時刻よりも後の第3の時刻までの間の前記車両の移動量に基づいて、前記前方撮影画像を前記車両の後方にシフトさせ、前記第3の時刻における前記床下画像を生成し、
前記車両が後退方向に移動している場合、前記第1の時刻から前記第3の時刻までの前記車両の移動量に基づいて、前記後方撮影画像を前記車両の前方にシフトさせ、前記第3の時刻における前記床下画像を生成する、制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御方法、及び、制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
自動車等の車両の床下の一部の領域を撮影した画像(以下、床下画像と称する)を表示装置に表示して、運転を支援する技術が知られている。
【0003】
特許文献1には、車両に搭載された複数のカメラで撮影した撮影画像を用いて床下画像を生成することが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2016-197785号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、複数のカメラが出力する撮影画像は必ずしも同じタイミングで撮影されたものであるとは限らず、このような場合に従来の方法で撮影画像を用いて床下画像を生成した場合、車両の実際の床下の状況とズレた床下画像が生成される可能性がある。
【0006】
本開示の目的は、車両の実際の床下の状況とズレの少ない床下画像を生成する技術を提供することにある。
【課題を解決するための手段】
【0007】
本開示の一態様は、複数の車輪を備え、前記車輪を用いて所定の方向に移動可能な車両の制御方法であって、前記車両は、前記車両外の第1の領域を撮影した第1の撮影画像を送信する第1のカメラと、前記車両外の第2の領域を撮影した第2の撮影画像を送信する第2のカメラと、所定のタイミングで受信した前記第1の撮影画像又は前記第2の撮影画像を用いて、前記車両の床下が撮影された床下画像を生成する制御装置と、前記床下画像を表示する表示装置と、を備え、前記所定のタイミングで受信した前記第1の撮影画像は、第2の時刻に撮影されたものであり、前記所定のタイミングで受信した前記第2の撮影画像は、前記第2の時刻よりも以前の第1の時刻に撮影されたものであり、前記制御装置が、前記車両が前記第1の領域の方向に移動している場合、前記第1の撮影画像を用いて、前記床下画像を生成し、前記車両が前記第2の領域の方向に移動している場合、前記第2の撮影画像を用いて、前記車両が前記第1の領域の方向に移動している場合と異なる方法で前記床下画像を生成する、制御方法を提供する。
【0008】
本開示の一態様は、複数の車輪を備え、前記車輪を用いて所定の方向に移動可能な車両が備える制御装置であって、前記車両は、前記車両外の第1の領域を撮影した第1の撮影画像を送信する第1のカメラと、前記車両外の第2の領域を撮影した第2の撮影画像を送信する第2のカメラと、所定のタイミングで受信した前記第1の撮影画像又は前記第2の撮影画像を用いて、前記車両の床下が撮影された床下画像を生成する前記制御装置と、前記床下画像を表示する表示装置と、を備え、前記所定のタイミングで受信した前記第1の撮影画像は、第2の時刻に撮影されたものであり、前記所定のタイミングで受信した前記第2の撮影画像は、前記第2の時刻よりも以前の第1の時刻に撮影されたものであり、前記制御装置は、前記車両が前記第1の領域の方向に移動している場合、前記第1の撮影画像を用いて、前記床下画像を生成し、前記車両が前記第2の領域の方向に移動している場合、前記第2の撮影画像を用いて、前記車両が前記第1の領域の方向に移動している場合と異なる方法で前記床下画像を生成する、制御装置を提供する。
【0009】
なお、これらの包括的又は具体的な態様は、システム、装置、方法、集積回路、コンピュータプログラム又は記録媒体で実現されてもよく、システム、装置、方法、集積回路、コンピュータプログラム及び記録媒体の任意な組み合わせで実現されてもよい。
【発明の効果】
【0010】
本開示によれば、車両の実際の床下の状況とズレの少ない床下画像を生成することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ