TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025099885
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216865
出願日
2023-12-22
発明の名称
識別システム、識別方法、および、識別装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B60W
40/02 20060101AFI20250626BHJP(車両一般)
要約
【課題】対象物を識別できる技術を提供する。
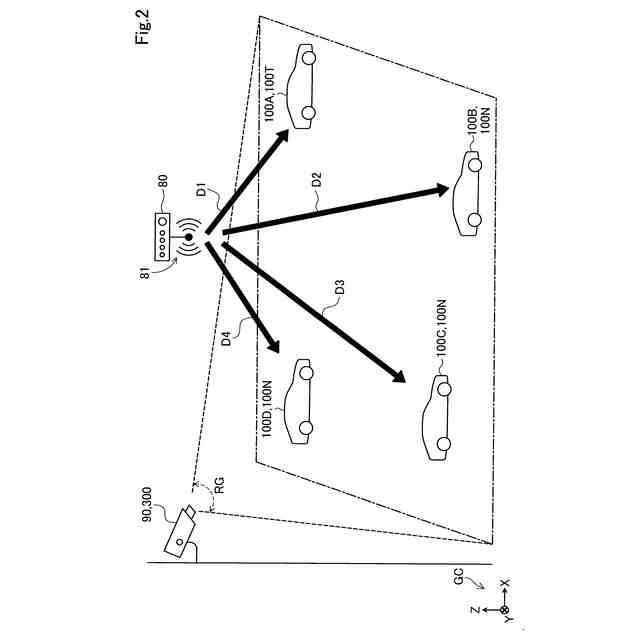
【解決手段】識別システムは、複数の対象物を検出する対象検出部と、対象検出部によって検出された複数の対象物に対して、順に電波を照射する電波照射部と、複数の対象物にそれぞれ設けられ、電波照射部によって照射された電波を検出する電波検出部と、電波検出部によって検出された電波の時系列データを用いて、複数の対象物のうち、少なくとも1つの対象物を識別する識別部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
識別システムであって、
複数の対象物を検出する対象検出部と、
前記対象検出部によって検出された前記複数の対象物に対して、順に電波を照射する電波照射部と、
前記複数の対象物にそれぞれ設けられ、前記電波照射部によって照射された前記電波を検出する電波検出部と、
前記電波検出部によって検出された前記電波の時系列データを用いて、前記複数の対象物のうち、少なくとも1つの前記対象物を識別する識別部と、を備える、識別システム。
続きを表示(約 790 文字)
【請求項2】
請求項1に記載の識別システムであって、
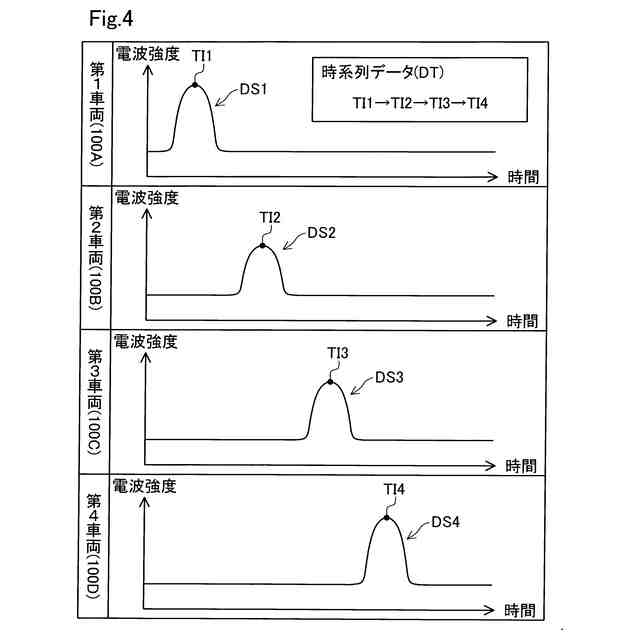
前記時系列データは、前記電波の強度変化によって特定される前記電波の受信タイミングであって、前記複数の対象物のそれぞれにおける前記電波の受信タイミングを時系列順に並べたデータであり、
前記識別部は、前記複数の対象物のそれぞれに前記電波を照射したときの順序と、前記時系列データと、を照合することにより、前記対象物を識別する、識別システム。
【請求項3】
請求項1に記載の識別システムであって、
前記対象物は、無人運転により移動可能な移動体であり、
前記識別システムは、さらに、前記対象物の動作を制御する制御部を備え、
前記識別部は、前記対象検出部によって検出された前記複数の対象物のうち、前記制御部の制御対象となる前記対象物を識別する、識別システム。
【請求項4】
識別方法であって、
複数の対象物を検出する対象検出工程と、
前記対象検出工程において検出された前記複数の対象物に対して、順に電波を照射する電波照射工程と、
前記電波照射工程において照射された前記電波を前記複数の対象物ごとに検出する電波検出工程と、
前記電波検出工程において検出された前記電波の時系列データを用いて、前記複数の対象物のうち、少なくとも1つの前記対象物を識別する識別工程と、を備える、識別方法。
【請求項5】
識別装置であって、
複数の対象物にそれぞれ設けられた電波検出部によって検出された電波の時系列データを用いて、前記複数の対象物のうち、少なくとも1つの前記対象物を識別する識別部を備え、
前記電波は、対象検出部によって検出された前記複数の対象物に対して、電波照射部によって順に照射されている、識別装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、識別システム、識別方法、および、識別装置に関する。
続きを表示(約 3,600 文字)
【背景技術】
【0002】
特許文献1には、駐車場に設けられた無線通信ネットワークを介して、ヘッドライトの点灯など、車両に設けられる装置の動作を実行させる要求を車両に送信し、車両が当該動作を実行したか否かを確認することで、車両を識別する方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
米国特許第10532771号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術では、車両を識別するためには、車両に何らかの動作を実行させなければならない。そのため、車両を識別するための処理が煩雑になるといった問題がある。また、車両の動作を実行させるための装置が車両に装着されていない時点では車両を識別できないといった問題がある。このような課題は、車両に限らず、移動体等の他の対象物においても共通する。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の第1形態によれば、識別システムが提供される。識別システムは、複数の対象物を検出する対象検出部と、前記対象検出部によって検出された前記複数の対象物に対して、順に電波を照射する電波照射部と、前記複数の対象物にそれぞれ設けられ、前記電波照射部によって照射された前記電波を検出する電波検出部と、前記電波検出部によって検出された前記電波の時系列データを用いて、前記複数の対象物のうち、少なくとも1つの前記対象物を識別する識別部と、を備える。この形態によれば、識別システムは、複対象検出部によって検出された複数の対象物に対して、順に電波を照射することができる。そして、識別システムは、複数の対象物にそれぞれ設けられた電波検出部によって検出された電波の時系列データを用いて、複数の対象物のうち、少なくとも1つの対象物を識別することができる。このようにすると、対象物に何らかの動作を実行させることなく、対象物を識別することができる。これにより、動作を実行させるための装置が対象物に装着されていない場合でも、識別システムは、対象物を識別することができる。
(2)上記形態であって、前記時系列データは、前記電波の強度変化によって特定される前記電波の受信タイミングであって、前記複数の対象物のそれぞれにおける前記電波の受信タイミングを時系列順に並べたデータであり、前記識別部は、前記複数の対象物のそれぞれに前記電波を照射したときの順序と、前記時系列データと、を照合することにより、前記対象物を識別してもよい。この形態によれば、識別システムは、複数の対象物のそれぞれに電波を照射したときの順序と、複数の対象物のそれぞれにおける電波の受信タイミングを時系列順に並べた時系列データと、を照合することにより、対象物を識別することができる。
(3)上記形態であって、前記対象物は、無人運転により移動可能な移動体であり、前記識別システムは、さらに、前記対象物の動作を制御する制御部を備え、前記識別部は、前記対象検出部によって検出された前記複数の対象物のうち、前記制御部の制御対象となる前記対象物を識別してもよい。この形態によれば、識別システムは、制御対象となる対象物を識別することができる。
(4)本開示の第2形態によれば、識別方法が提供される。識別方法は、複数の対象物を検出する対象検出工程と、前記対象検出工程において検出された前記複数の対象物に対して、順に電波を照射する電波照射工程と、前記電波照射工程において照射された前記電波を前記複数の対象物ごとに検出する電波検出工程と、前記電波検出工程において検出された前記電波の時系列データを用いて、前記複数の対象物のうち、少なくとも1つの前記対象物を識別する識別工程と、を備える。この形態によれば、複対象検出部によって検出された複数の対象物に対して、順に電波を照射することができる。そして、複数の対象物にそれぞれ設けられた電波検出部によって検出された電波の時系列データを用いて、複数の対象物のうち、少なくとも1つの対象物を識別することができる。このようにすると、対象物に何らかの動作を実行させることなく、対象物を識別することができる。これにより、動作を実行させるための装置が対象物に装着されていない場合でも、対象物を識別することができる。
(5)本開示の第3形態によれば、識別装置が提供される。識別装置は、複数の対象物にそれぞれ設けられた電波検出部によって検出された電波の時系列データを用いて、前記複数の対象物のうち、少なくとも1つの前記対象物を識別する識別部を備え、前記電波は、対象検出部によって検出された前記複数の対象物に対して、電波照射部によって順に照射されている。この形態によれば、識別装置は、複数の対象物に対して順に照射された電波の時系列データを用いて、複数の対象物のうち、少なくとも1つの対象物を識別することができる。このようにすると、対象物に何らかの動作を実行させることなく、対象物を識別することができる。これにより、動作を実行させるための装置が対象物に装着されていない場合でも、対象物を識別することができる。
本開示は、上記の識別システム、識別方法、および、識別装置以外の種々の形態で実現することが可能である。例えば、識別装置による識別結果を用いて対象物の位置を特定する位置特定装置、識別システム、識別装置、および位置特定装置の製造方法、識別システム、識別装置、および位置特定装置の制御方法、その制御方法を実現するコンピュータプログラム、そのコンピュータプログラムを記録した一時的でない記録媒体等の形態で実現することができる。
【図面の簡単な説明】
【0007】
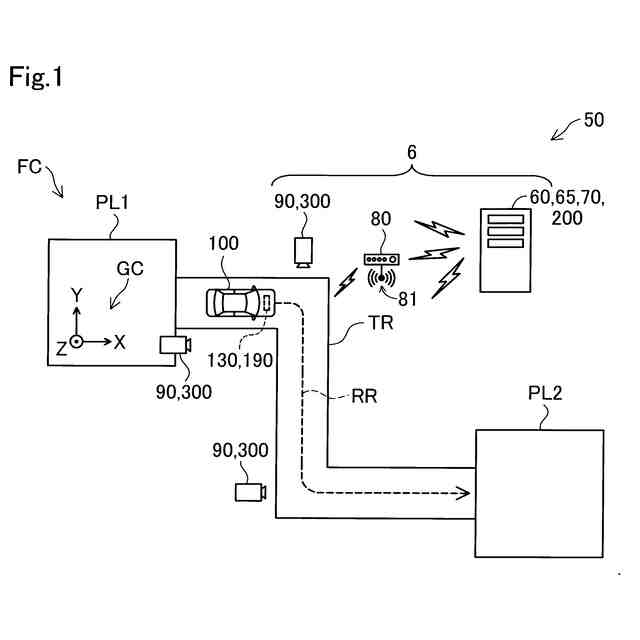
第1実施形態における走行システムの構成を示す概念図。
電波の照射態様を説明するための図。
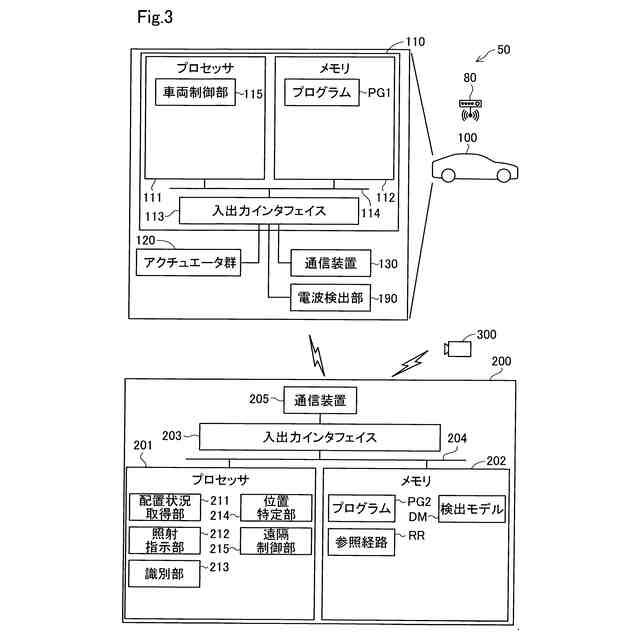
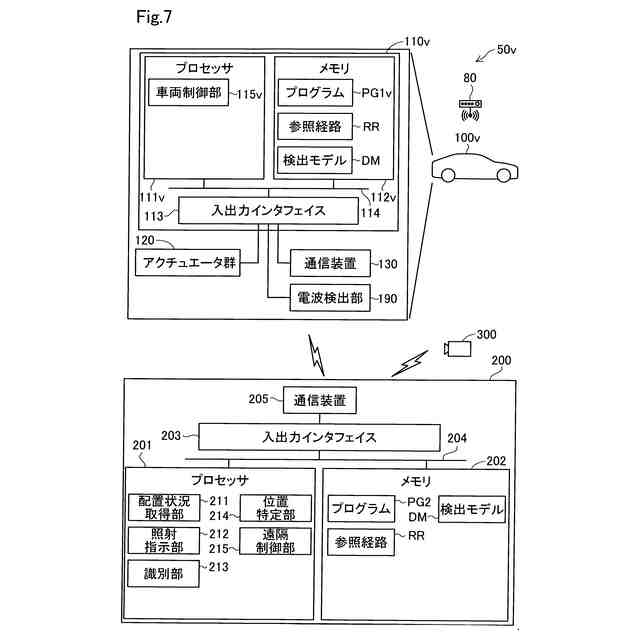
第1実施形態における走行システムの構成を示すブロック図。
図2に示す各車両に設けられた電波検出部の検出結果を示す模式図。
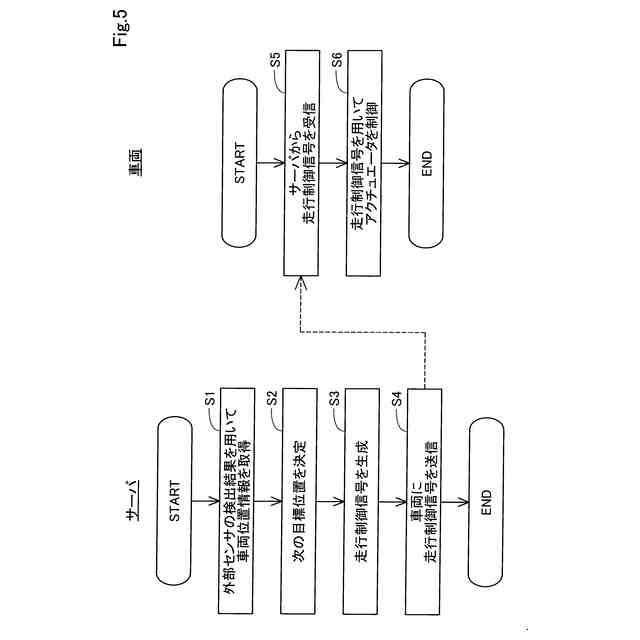
第1実施形態における車両の走行制御の処理手順を示すフローチャート。
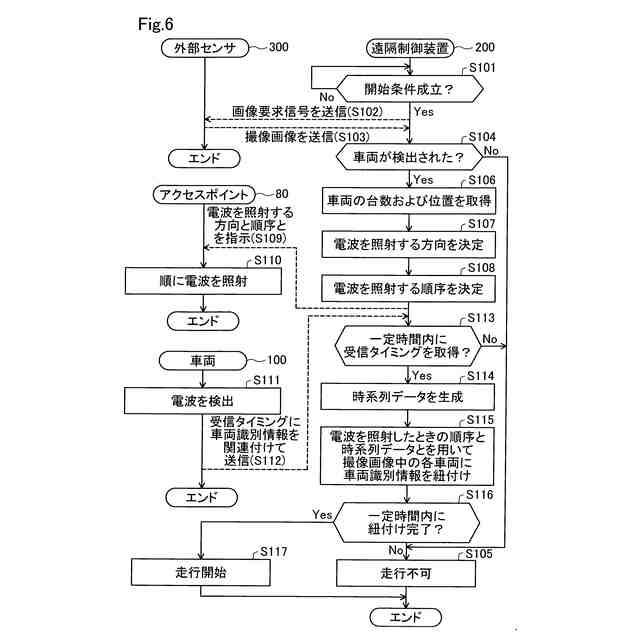
対象車両の識別方法を示すフローチャート。
第2実施形態における走行システムの構成を示すブロック図。
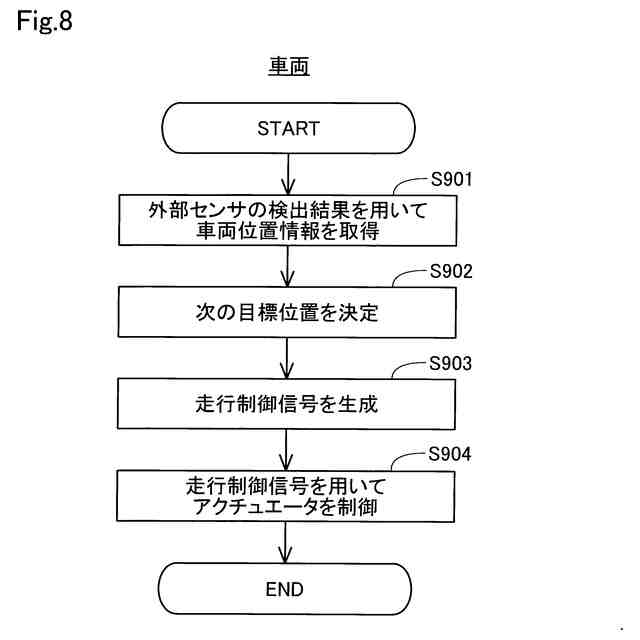
第2実施形態における車両の走行制御の処理手順を示すフローチャート。
【発明を実施するための形態】
【0008】
A.第1実施形態:
図1は、第1実施形態における走行システム50の構成を示す概念図である。走行システム50は、移動体に搭乗した搭乗者の走行操作によることなく、移動体を移動させるためのシステムである。走行システム50は、移動体としての1以上の車両100と、識別システム6と、位置特定装置65と、遠隔制御装置70と、を備える。識別システム6は、複数の対象物のうち、少なくとも1つの対象物を識別する。本実施形態では、対象物は、車両100である。識別システム6は、識別装置60と、1以上のアクセスポイント80と、1以上の対象検出部90と、を備える。識別装置60は、車両100を識別する。位置特定装置65は、識別装置60による識別結果を用いて、車両100の位置を特定する。遠隔制御装置70は、車両100の位置等を用いて、車両100の動作を遠隔制御する。本実施形態では、識別装置60、位置特定装置65、および、遠隔制御装置70の機能は、サーバ200によって実現される。
【0009】
対象検出部90は、複数の車両100を検出する。本実施形態では、対象検出部90は、外部センサ300である。外部センサ300は、車両100の外部に位置するセンサである。本実施形態における外部センサ300は、車両100の外部から車両100を捕捉するセンサである。外部センサ300は、通信装置(図示せず)を備えており、有線通信あるいは無線通信によりサーバ200等の他の装置と通信することができる。具体的には、外部センサ300は、カメラによって構成されている。外部センサ300としてのカメラは、車両100を撮像し、検出結果として撮像画像を出力する。
【0010】
アクセスポイント80は、ネットワークを介して、車両100とサーバ200とを通信可能に接続する。アクセスポイント80は、対象検出部90によって検出された複数の車両100に対して電波を照射する電波照射部81を備える。本実施形態では、電波照射部81は、外部センサ300によって検出された複数の車両100に対して、順に電波を照射する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ