TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025096930
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023212932
出願日
2023-12-18
発明の名称
モータ、モータを備えるポンプ、およびモータにおける回転子の変位検出方法
出願人
株式会社荏原製作所
代理人
個人
,
個人
,
個人
,
個人
主分類
H02P
6/14 20160101AFI20250623BHJP(電力の発電,変換,配電)
要約
【課題】1種類のセンサのみを用いて、回転子の回転角度だけでなく回転子の回転軸と直交する方向への変位も検出する。
【解決手段】複数の磁極を有する回転子と、複数の固定子コイルを有するモータ固定子と、前記モータ固定子上に設けられ、前記回転子からの磁界に応じた電圧信号を出力する複数の磁気センサと、前記複数の磁気センサからの電圧信号に基づいて前記回転子の回転角度を決定するように構成され、さらに、前記複数の磁気センサからの電圧信号に基づいて前記回転子の回転軸と直交する面内における前記回転子の変位を決定するように構成された制御ユニットと、を備えるモータが提供される。
【選択図】図5
特許請求の範囲
【請求項1】
複数の磁極を有する回転子と、
複数の固定子コイルを有するモータ固定子と、
前記モータ固定子上に設けられ、前記回転子からの磁界に応じた電圧信号を出力する複数の磁気センサと、
前記複数の磁気センサからの電圧信号に基づいて前記回転子の回転角度を決定するように構成され、さらに、前記複数の磁気センサからの電圧信号に基づいて前記回転子の回転軸と直交する面内における前記回転子の変位を決定するように構成された制御ユニットと、
を備えるモータ。
続きを表示(約 1,200 文字)
【請求項2】
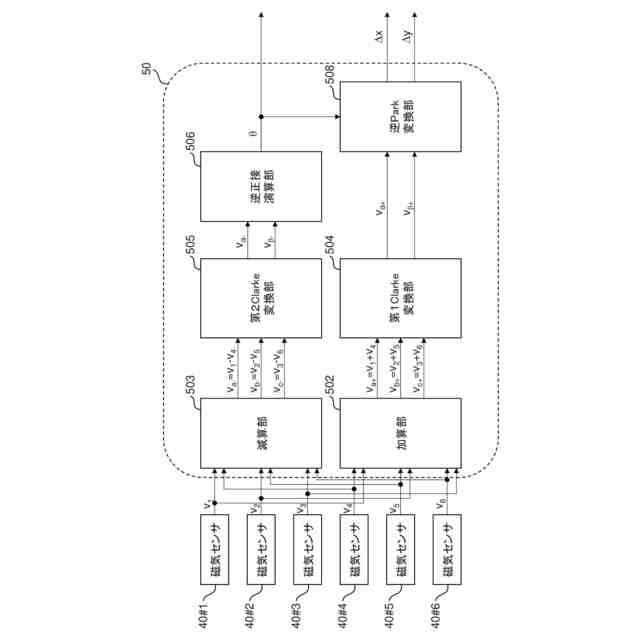
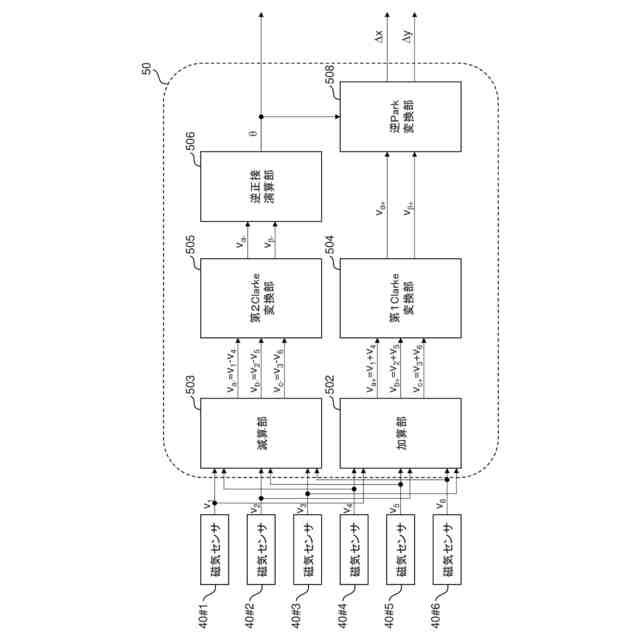
前記制御ユニットは、前記複数の磁気センサからの電圧信号の値を第1Clarke変換部においてClarke変換し、さらに逆Park変換部において逆Park変換することによって、前記回転子の回転軸と直交する面内における前記回転子の前記変位を決定するように構成される、請求項1に記載のモータ。
【請求項3】
前記制御ユニットは、前記複数の磁気センサからの電圧信号の値を第2Clarke変換部においてClarke変換し、さらに逆正接演算部において当該Clarke変換後の値の逆正接を計算することによって、前記回転子の前記回転角度を決定するように構成される、請求項2に記載のモータ。
【請求項4】
前記制御ユニットは、前記計算された逆正接の値を前記逆Park変換において用いるように構成される、請求項3に記載のモータ。
【請求項5】
前記複数の磁気センサは、対向配置された複数の磁気センサ対を備え、
前記制御ユニットは、前記磁気センサ対からの電圧信号の和を前記第1Clarke変換部への入力とし、前記磁気センサ対からの電圧信号の差を前記第2Clarke変換部への入力とするように構成される、
請求項3に記載のモータ。
【請求項6】
請求項1から5のいずれか1項に記載のモータと、
前記モータによって回転する羽根車と、
を備えるポンプ。
【請求項7】
モータにおける回転子の変位を検出する方法であって、
前記モータは、
複数の磁極を有する回転子と、
複数の固定子コイルを有するモータ固定子と、
前記モータ固定子上に設けられ、前記回転子からの磁界に応じた電圧信号を出力する複数の磁気センサと、を備え、
前記複数の磁気センサからの電圧信号の値を第1Clarke変換部においてClarke変換するステップと、
前記第1Clarke変換部におけるClarke変換後の値を逆Park変換するステップと、
によって、前記回転子の回転軸と直交する面内における前記回転子の変位を決定することを含む、方法。
【請求項8】
前記複数の磁気センサからの電圧信号の値を第2Clarke変換部においてClarke変換するステップと、
前記第2Clarke変換部におけるClarke変換後の値の逆正接を計算するステップと、
によって、前記回転子の回転角度を決定することをさらに含む、請求項7に記載の方法。
【請求項9】
前記複数の磁気センサは、対向配置された複数の磁気センサ対を備え、
前記磁気センサ対からの電圧信号の和を前記第1Clarke変換部へ入力するステップと、
前記磁気センサ対からの電圧信号の差を前記第2Clarke変換部へ入力するステップと、
を含む、請求項8に記載の方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ、モータを備えるポンプ、およびモータにおける回転子の変位検出方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
モータは通常、その回転軸を支持するための軸受とともに使用される。モータの回転軸を非接触で支持することが可能な軸受として、磁気軸受がある。また、回転軸の回転と非接触支持(磁気浮上)の機能を兼ね備えたモータとして、ベアリングレスモータが知られている。これらのモータにおける回転軸の回転と磁気浮上の制御を行うために、回転子の回転角度および回転軸と直交する方向への変位を検出することが重要である。従来、回転子の回転角度の検出と、回転子の回転軸と直交する方向への変位の検出には、それぞれ別個のセンサが用いられていた(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2001-016887号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されるような従来のベアリングレスモータは、回転軸の回転制御および浮上制御のために2種類のセンサを使用する。そのため、従来の制御方法では、それら2種類のセンサを設置するためのスペースが必要となり、装置の設計レイアウトの自由度が制限されるという欠点がある。そこで、1種類のセンサのみを用いて、回転子の回転角度だけでなく回転子の回転軸と直交する方向への変位も検出することが望まれる。
【課題を解決するための手段】
【0005】
[形態1]形態1によれば、複数の磁極を有する回転子と、複数の固定子コイルを有するモータ固定子と、前記モータ固定子上に設けられ、前記回転子からの磁界に応じた電圧信号を出力する複数の磁気センサと、前記複数の磁気センサからの電圧信号に基づいて前記回転子の回転角度を決定するように構成され、さらに、前記複数の磁気センサからの電圧信号に基づいて前記回転子の回転軸と直交する面内における前記回転子の変位を決定するように構成された制御ユニットと、を備えるモータが提供される。
【0006】
[形態2]形態2によれば、形態1のモータにおいて、前記制御ユニットは、前記複数の磁気センサからの電圧信号の値を第1Clarke変換部においてClarke変換し、さらに逆Park変換部において逆Park変換することによって、前記回転子の回転軸と直交する面内における前記回転子の前記変位を決定するように構成される。
【0007】
[形態3]形態3によれば、形態2のモータにおいて、前記制御ユニットは、前記複数の磁気センサからの電圧信号の値を第2Clarke変換部においてClarke変換し、さらに逆正接演算部において当該Clarke変換後の値の逆正接を計算することによって、前記回転子の前記回転角度を決定するように構成される。
【0008】
[形態4]形態4によれば、形態3のモータにおいて、前記制御ユニットは、前記計算された逆正接の値を前記逆Park変換において用いるように構成される。
【0009】
[形態5]形態5によれば、形態3のモータにおいて、前記複数の磁気センサは、対向配置された複数の磁気センサ対を備え、前記制御ユニットは、前記磁気センサ対からの電圧信号の和を前記第1Clarke変換部への入力とし、前記磁気センサ対からの電圧信号の差を前記第2Clarke変換部への入力とするように構成される。
【0010】
[形態6]形態6によれば、形態1から5のいずれか1のモータと、前記モータによって回転する羽根車と、を備えるポンプが提供される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ