TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090924
公報種別
公開特許公報(A)
公開日
2025-06-18
出願番号
2023205814
出願日
2023-12-06
発明の名称
分析装置および分析方法
出願人
株式会社インターネットイニシアティブ
代理人
個人
,
個人
,
個人
,
個人
主分類
G01C
21/34 20060101AFI20250611BHJP(測定;試験)
要約
【課題】ユーザごとの運転の傾向に合わせた走行ルートを提示することを目的とする。
【解決手段】
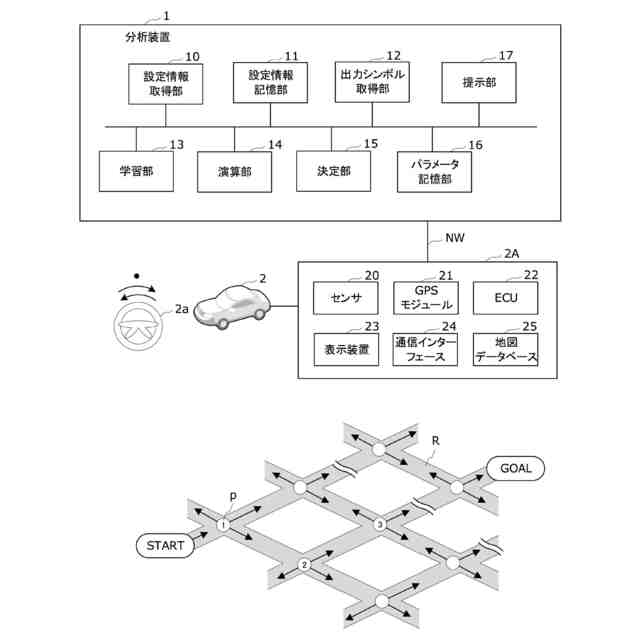
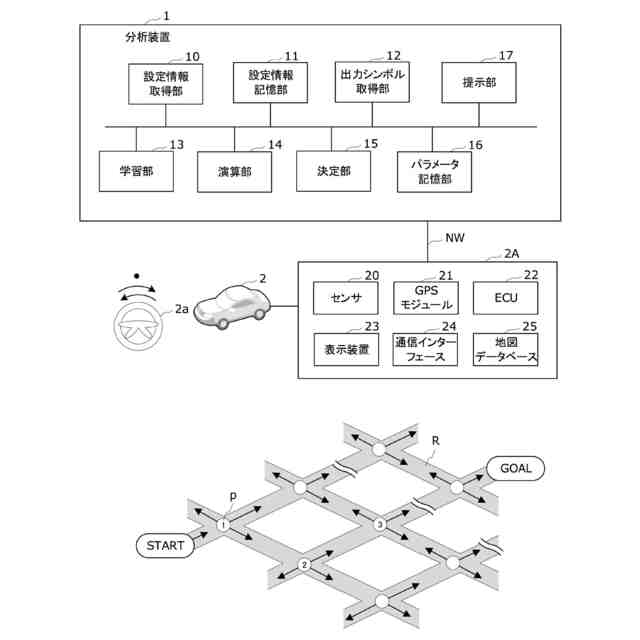
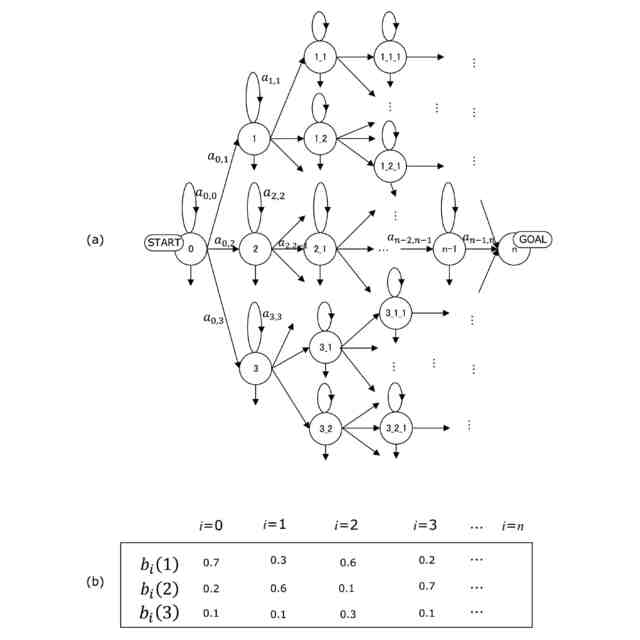
分析装置1は、車両2の出発地点および目的地点を取得する設定情報取得部10と、車両2が目的地点に到達するまでに通過する各ポイントpでの、進行方向の操作の履歴を含む出力シンボル系列を取得する出力シンボル取得部12と、出発地点から目的地点までに車両2が通過する各ポイントpを隠れ状態の有限集合とし、かつ、各ポイントpでの車両2による進行方向の操作を観測可能な出力シンボルの有限集合とした隠れマルコフモデルのパラメータが事前に推定された、学習済みの隠れマルコフモデルを記憶するパラメータ記憶部16と、学習済みの隠れマルコフモデルを用いて、車両2が各ポイントpで、出力シンボル取得部12によって取得された進行方向の操作の各々が行われる確率を求める演算部14とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
車両の出発地点および目的地点を取得するように構成された設定情報取得部と、
前記車両が前記目的地点に到達するまでに通過する各ポイントでの、前記車両による進行方向の操作の履歴を含む出力シンボル系列を取得するように構成された出力シンボル取得部と、
前記出発地点から前記目的地点までに前記車両が通過する前記各ポイントを隠れ状態の有限集合とし、かつ、前記各ポイントでの前記車両による前記進行方向の操作を観測可能な出力シンボルの有限集合とした隠れマルコフモデルのパラメータが事前に推定された、学習済みの隠れマルコフモデルを記憶するように構成された記憶部と、
前記学習済みの隠れマルコフモデルを用いて、前記車両が前記各ポイントで、前記出力シンボル取得部によって取得された前記進行方向の操作の各々が行われる確率を求めるように構成された演算部と、
前記演算部により求められた、前記進行方向の操作の各々が行われる確率に基づいて、前記進行方向の操作のうち前記車両による操作の確率が最も高い進行方向の操作に応じて、前記目的地点までの走行ルートを決定するように構成された決定部と、
決定された前記走行ルートを提示するように構成された提示部と
を備える分析装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の分析装置において、
前記設定情報取得部は、前記車両が前記出発地点から前記目的地点に到達することができる複数の異なる走行ルートを取得し、
前記複数の異なる走行ルートの各々は、複数のポイントにより特定される
ことを特徴とする分析装置。
【請求項3】
請求項1に記載の分析装置において、
前記出力シンボル取得部は、前記車両による各ポイントでの前記進行方向の操作を示す出力シンボル系列を学習データとして取得し、
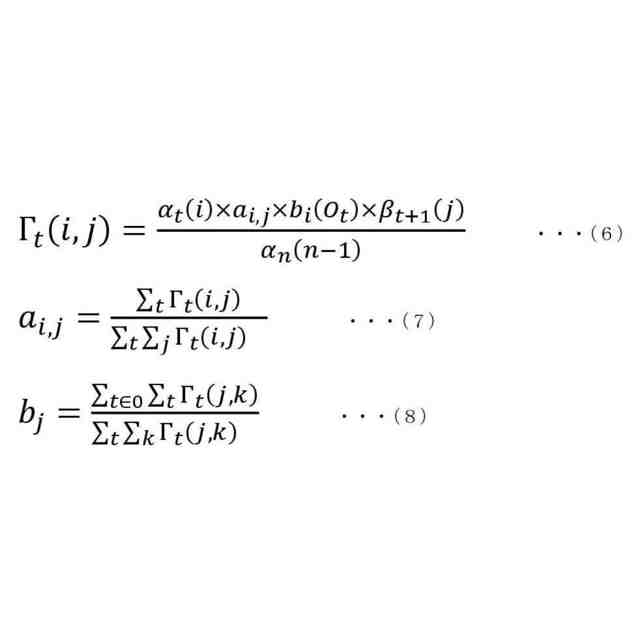
さらに、前記学習データに対する尤度を最大にする、前記車両が所定のポイントから別のポイントに移動する確率である状態遷移確率分布、および、前記車両が前記各ポイントで、所定の前記進行方向の操作を行う確率であるシンボル出力確率分布を含む前記隠れマルコフモデルの前記パラメータを推定するように構成された学習部を備え、
前記学習済みの隠れマルコフモデルは、前記学習部によって推定された前記パラメータを備える
ことを特徴とする分析装置。
【請求項4】
請求項1に記載の分析装置において、
前記進行方向の操作は、前記車両における予め設定された複数のステアリング操作を含む
ことを特徴とする分析装置。
【請求項5】
車両の出発地点および目的地点を取得する設定情報取得ステップと、
前記車両が前記目的地点に到達するまでに通過する各ポイントでの、前記車両による進行方向の操作の履歴を含む出力シンボル系列を取得する出力シンボル取得ステップと、
前記出発地点から前記目的地点までに前記車両が通過する前記各ポイントを隠れ状態の有限集合とし、かつ、前記各ポイントでの前記車両による前記進行方向の操作を観測可能な出力シンボルの有限集合とした隠れマルコフモデルのパラメータが事前に推定された、学習済みの隠れマルコフモデルを記憶部に記憶する記憶ステップと、
前記学習済みの隠れマルコフモデルを用いて、前記車両が前記各ポイントで、前記出力シンボル取得ステップで取得した前記進行方向の操作の各々が行われる確率を求める演算ステップと、
前記演算ステップで求めた、前記進行方向の操作の各々が行われる確率に基づいて、前記進行方向の操作のうち前記車両による操作の確率が最も高い進行方向の操作に応じて、前記目的地点までの走行ルートを決定する決定ステップと、
決定された前記走行ルートを提示する提示ステップと
を備える分析方法。
【請求項6】
請求項5に記載の分析方法において、
前記設定情報取得ステップは、前記車両が前記出発地点から前記目的地点に到達することができる複数の異なる走行ルートを取得し、
前記複数の異なる走行ルートの各々は、複数のポイントにより特定される
ことを特徴とする分析方法。
【請求項7】
請求項5に記載の分析方法において、
前記出力シンボル取得ステップは、前記車両による各ポイントでの前記進行方向の操作を示す出力シンボル系列を学習データとして取得し、
さらに、前記学習データに対する尤度を最大にする、前記車両が所定のポイントから別のポイントに移動する確率である状態遷移確率分布、および、前記車両が前記各ポイントで、所定の前記進行方向の操作を行う確率であるシンボル出力確率分布を含む前記隠れマルコフモデルの前記パラメータを推定する学習ステップを備え、
前記学習済みの隠れマルコフモデルは、前記学習ステップで推定された前記パラメータを備える
ことを特徴とする分析方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、分析装置および分析方法に関し、特に、車両の走行ルートの分析技術に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来から、車両などに搭載されるカーナビゲーションシステムが知られている。例えば、特許文献1は、車両の現在位置から目的地までの距離が最短となる走行ルートや最短時間で目的地まで到達する走行ルートを設定して、車両のルート案内を行う技術を開示する。また、特許文献1では、信号機の有無や交差点の有無、車両の施設への入りやすさなどから、車両がより効率的に目的地に到達するルートが設定されている。
【0003】
ここで、車両を運転するドライバーであるユーザは、最短時間や最短距離に基づいて画一的に設定された案内ルートに対して、案内に沿った道路とは異なる抜け道などを頻繁に使用して走行する場合がある。しかし、特許文献1が開示するカーナビゲーションシステムによるルート設定では、ユーザごとの運転の傾向に合わせて個別化された走行ルートを提示することはできなかった。
【先行技術文献】
【特許文献】
【0004】
特開2012-220265号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このように、従来の技術によれば、ユーザごとの運転の傾向に合わせた走行ルートを提示することができなかった。
【0006】
本発明は、上述した課題を解決するためになされたものであり、ユーザごとの運転の傾向に合わせた走行ルートを提示することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、本発明に係る分析装置は、車両の出発地点および目的地点を取得するように構成された設定情報取得部と、前記車両が前記目的地点に到達するまでに通過する各ポイントでの、前記車両による進行方向の操作の履歴を含む出力シンボル系列を取得するように構成された出力シンボル取得部と、前記出発地点から前記目的地点までに前記車両が通過する前記各ポイントを隠れ状態の有限集合とし、かつ、前記各ポイントでの前記車両による前記進行方向の操作を観測可能な出力シンボルの有限集合とした隠れマルコフモデルのパラメータが事前に推定された、学習済みの隠れマルコフモデルを記憶するように構成された記憶部と、前記学習済みの隠れマルコフモデルを用いて、前記車両が前記各ポイントで、前記出力シンボル取得部によって取得された前記進行方向の操作の各々が行われる確率を求めるように構成された演算部と、前記演算部により求められた、前記進行方向の操作の各々が行われる確率に基づいて、前記進行方向の操作のうち前記車両による操作の確率が最も高い進行方向の操作に応じて、前記目的地点までの走行ルートを決定するように構成された決定部と、決定された前記走行ルートを提示するように構成された提示部とを備える。
【0008】
また、本発明に係る分析装置において、前記設定情報取得部は、前記車両が前記出発地点から前記目的地点に到達することができる複数の異なる走行ルートを取得し、前記複数の異なる走行ルートの各々は、複数のポイントにより特定されてもよい。
【0009】
また、本発明に係る分析装置において、前記出力シンボル取得部は、前記車両による各ポイントでの前記進行方向の操作を示す出力シンボル系列を学習データとして取得し、さらに、前記学習データに対する尤度を最大にする、前記車両が所定のポイントから別のポイントに移動する確率である状態遷移確率分布、および、前記車両が前記各ポイントで、所定の前記進行方向の操作を行う確率であるシンボル出力確率分布を含む前記隠れマルコフモデルの前記パラメータを推定するように構成された学習部を備え、前記学習済みの隠れマルコフモデルは、前記学習部によって推定された前記パラメータを備えていてもよい。
【0010】
また、本発明に係る分析装置において、前記進行方向の操作は、前記車両における予め設定された複数のステアリング操作を含んでいてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ