TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025090922
公報種別
公開特許公報(A)
公開日
2025-06-18
出願番号
2023205809
出願日
2023-12-06
発明の名称
操作システム及び作業機械
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
E02F
9/20 20060101AFI20250611BHJP(水工;基礎;土砂の移送)
要約
【課題】排土装置の操作性の向上を図りやすい作業機械の操作システム及び作業機械を提供する。
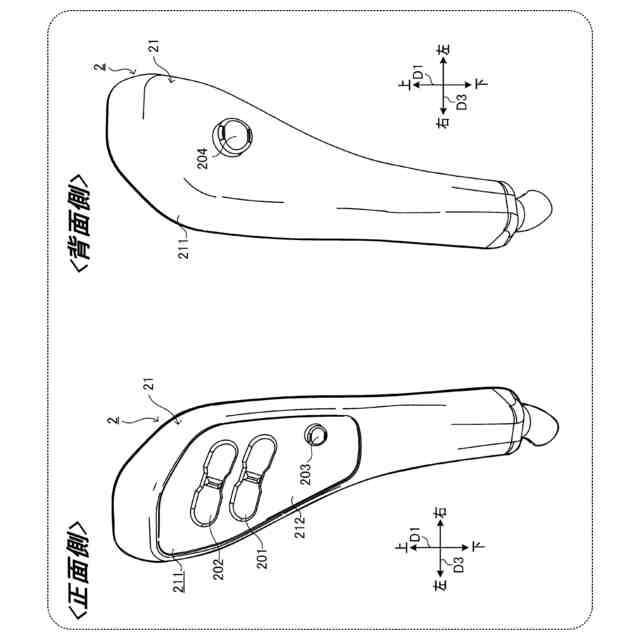
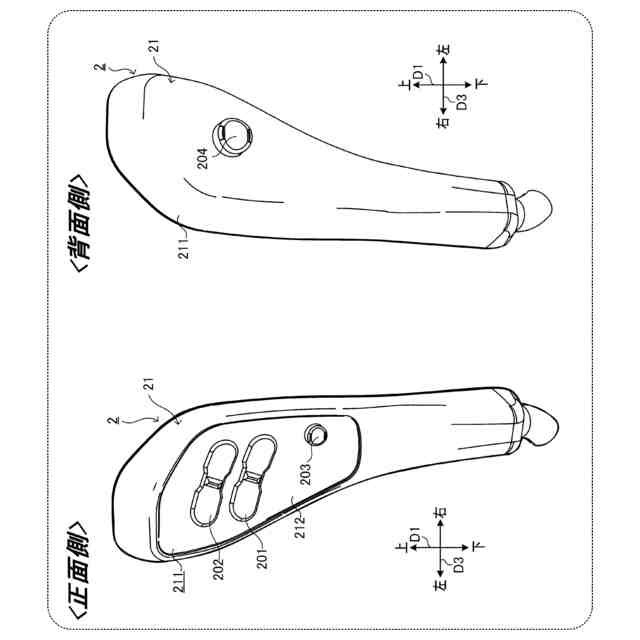
【解決手段】操作システム2は、ブレードを有する排土装置を備える作業機械の操作システム2である。操作システム2は、操作レバー21と、第1操作子201と、第2操作子202と、を備える。操作レバー21は、ブレードを昇降動作させるための昇降操作を受け付ける。第1操作子201は、鉛直方向に沿った第1軸を中心にブレードを回転揺動させるアングル動作をブレードにさせるための操作を受け付ける。第2操作子202は、水平方向に沿った第2軸を中心にブレードを回転揺動させるチルト動作をブレードにさせるための操作を受け付ける。第1操作子201と第2操作子202とは、別々に設けられている。
【選択図】図6
特許請求の範囲
【請求項1】
ブレードを有する排土装置を備える作業機械の操作システムであって、
前記ブレードを昇降動作させるための昇降操作を受け付ける操作レバーと、
鉛直方向に沿った第1軸を中心に前記ブレードを回転揺動させるアングル動作を前記ブレードにさせるための操作を受け付ける第1操作子と、
水平方向に沿った第2軸を中心に前記ブレードを回転揺動させるチルト動作を前記ブレードにさせるための操作を受け付ける第2操作子と、を備え、
前記第1操作子と前記第2操作子とは、別々に設けられている、
操作システム。
続きを表示(約 980 文字)
【請求項2】
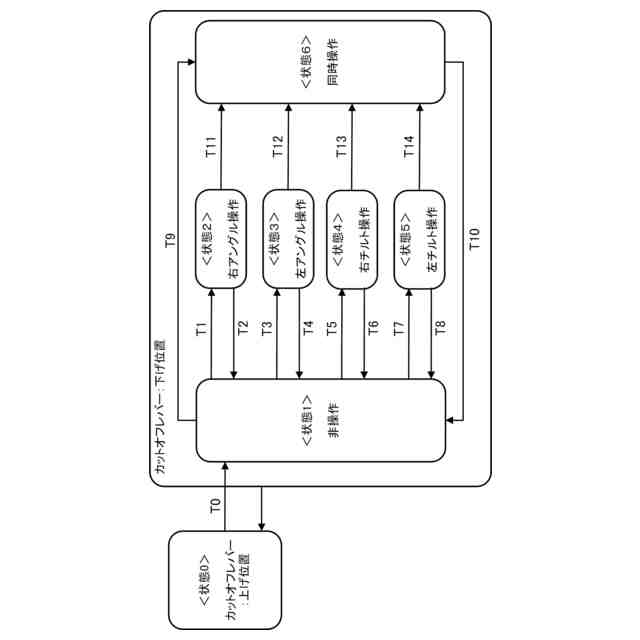
前記第1操作子と前記第2操作子との同時操作時には、前記アングル動作及び前記チルト動作が禁止される、
請求項1に記載の操作システム。
【請求項3】
前記第1操作子と前記第2操作子とのいずれか一方が操作される単独操作状態から、前記第1操作子と前記第2操作子との両方が操作される同時操作状態に遷移すると、前記アングル動作及び前記チルト動作が禁止される、
請求項2に記載の操作システム。
【請求項4】
前記同時操作状態から前記単独操作状態に遷移した場合の前記単独操作状態においても、前記アングル動作及び前記チルト動作が禁止される、
請求項3に記載の操作システム。
【請求項5】
前記作業機械の動作が制限されるロック状態と前記作業機械の動作が制限されないロック解除状態とを切り替えるカットオフレバーを更に備え、
前記単独操作状態の継続中に、前記ロック状態から前記ロック解除状態に切り替わった場合においても、前記アングル動作及び前記チルト動作が禁止される、
請求項3又は4に記載の操作システム。
【請求項6】
前記ブレードを自動制御する自動制御部を更に備え、
前記ブレードの自動制御中に前記第1操作子と前記第2操作子との一方が操作されると、前記ブレードの自動制御を停止する、
請求項1~4のいずれか1項に記載の操作システム。
【請求項7】
前記第1操作子と前記第2操作子とは、隣接して配置されている、
請求項1~4のいずれか1項に記載の操作システム。
【請求項8】
前記第1操作子と前記第2操作子とは、前記操作レバーの把持部に配置されている、
請求項1~4のいずれか1項に記載の操作システム。
【請求項9】
前記第1操作子と前記第2操作子とは、前記把持部の長手方向に並べて配置されている、
請求項8に記載の操作システム。
【請求項10】
前記把持部における前記第1操作子及び前記第2操作子が設けられた操作面は、機体の左右方向において運転席側に向けて傾斜する、
請求項8に記載の操作システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ブレードを有する排土装置を備える作業機械の操作システム及び作業機械に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
関連技術として、排土装置と、排土装置のブレードを操作するブレード操作装置と、を備える作業機械(油圧ショベル)が知られている(例えば、特許文献1参照)。排土装置は、ブレードと、ブレード昇降シリンダと、アングルシリンダと、チルトシリンダと、を有する。ブレード操作装置は、前後方向に傾動させることによりブレード昇降シリンダを操作する(ブレード)操作レバーと、操作レバーに設けられたチルト・アングル操作スイッチ及びシリンダ選択スイッチとを有する。
【0003】
ブレード操作装置では、シリンダ選択スイッチにより、チルト・アングル操作スイッチによって操作されるシリンダを選択する。アングルシリンダが選択されている状態で、チルト・アングル操作スイッチが操作されると、作業機械は、ブレードの長さ方向の両端を前後方向に揺動させるアングル動作を行う。チルトシリンダが選択されている状態で、チルト・アングル操作スイッチが操作されると、作業機械は、ブレードの長さ方向の両端を上下方向に揺動させるチルト動作を行う。
【先行技術文献】
【特許文献】
【0004】
特開2019-167686号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記関連技術に係る作業機械では、例えば、アングル動作を行った後でチルト動作を行う場合、シリンダ選択スイッチを操作した後、チルト・アングル操作スイッチにより操作する必要がある。そのため、オペレータによっては操作が煩雑であり、また、選択中のシリンダを勘違いすることに起因した誤操作を生じる可能性がある。
【0006】
本発明の目的は、排土装置の操作性の向上を図りやすい作業機械の操作システム及び作業機械を提供することにある。
【課題を解決するための手段】
【0007】
本発明の一態様に係る操作システムは、ブレードを有する排土装置を備える作業機械の操作システムである。前記操作システムは、操作レバーと、第1操作子と、第2操作子と、を備える。前記操作レバーは、前記ブレードを昇降動作させるための昇降操作を受け付ける。前記第1操作子は、鉛直方向に沿った第1軸を中心に前記ブレードを回転揺動させるアングル動作を前記ブレードにさせるための操作を受け付ける。前記第2操作子は、水平方向に沿った第2軸を中心に前記ブレードを回転揺動させるチルト動作を前記ブレードにさせるための操作を受け付ける。前記第1操作子と前記第2操作子とは、別々に設けられている。
【0008】
本発明の一態様に係る作業機械は、前記操作システムと、前記排土装置を有する機体と、を備える。
【発明の効果】
【0009】
本発明によれば、排土装置の操作性の向上を図りやすい作業機械の操作システム及び作業機械を提供することができる。
【図面の簡単な説明】
【0010】
図1は、実施形態1に係る作業機械の全体構成を示す概略斜視図である。
図2は、実施形態1に係る作業機械の全体構成を示す概略平面図である。
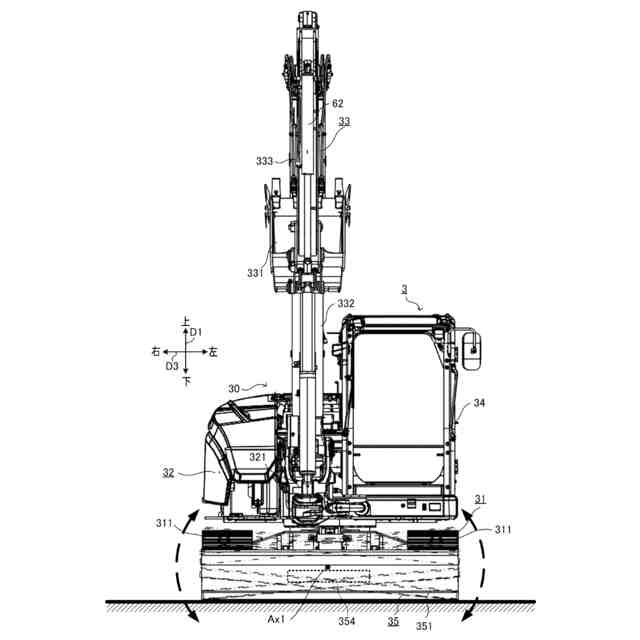
図3は、実施形態1に係る作業機械の全体構成を示す概略正面図である。
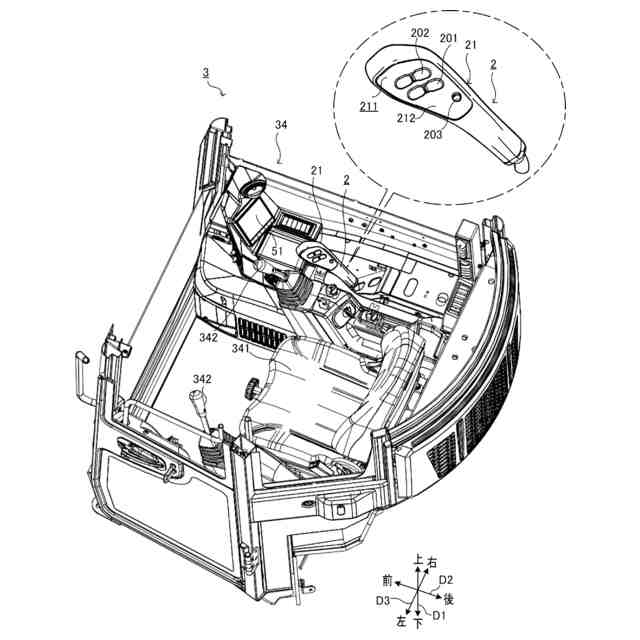
図4は、実施形態1に係る作業機械の運転部の内部を示す概略斜視図である。
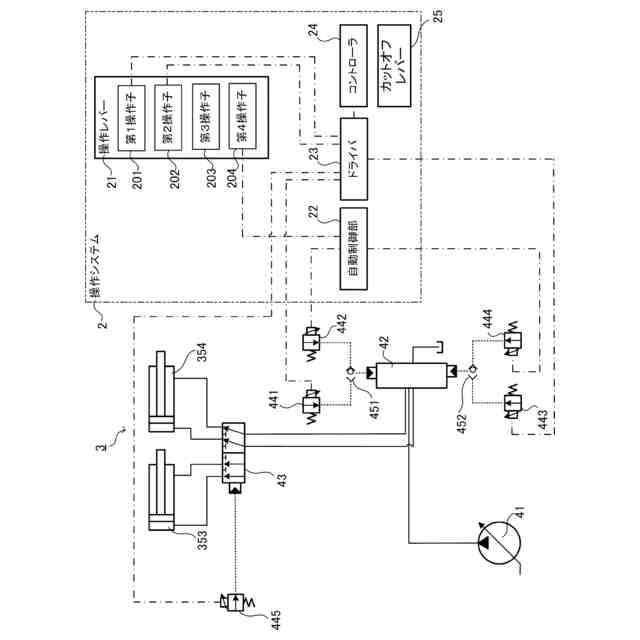
図5は、実施形態1に係る作業機械の油圧回路等を示す概略図である。
図6は、実施形態1に係る作業機械の操作レバーを示す概略図である。
図7は、実施形態1に係る作業機械の操作システムの動作例を示す状態遷移図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ