TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025089853
公報種別
公開特許公報(A)
公開日
2025-06-16
出願番号
2023204769
出願日
2023-12-04
発明の名称
車両の運転支援装置
出願人
株式会社SUBARU
代理人
インフォート弁理士法人
,
弁理士法人イトーシン国際特許事務所
主分類
B60W
40/10 20120101AFI20250609BHJP(車両一般)
要約
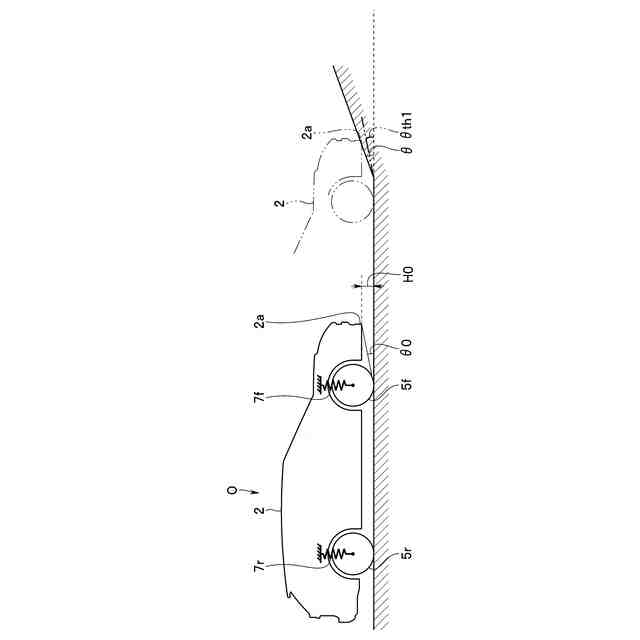
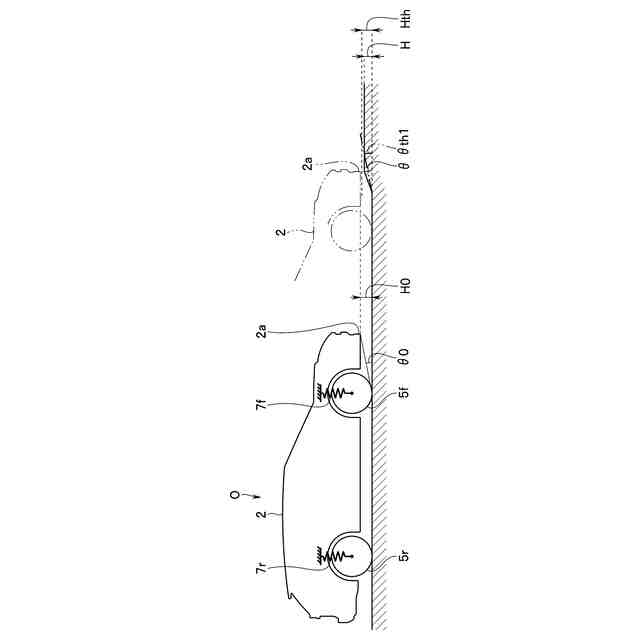
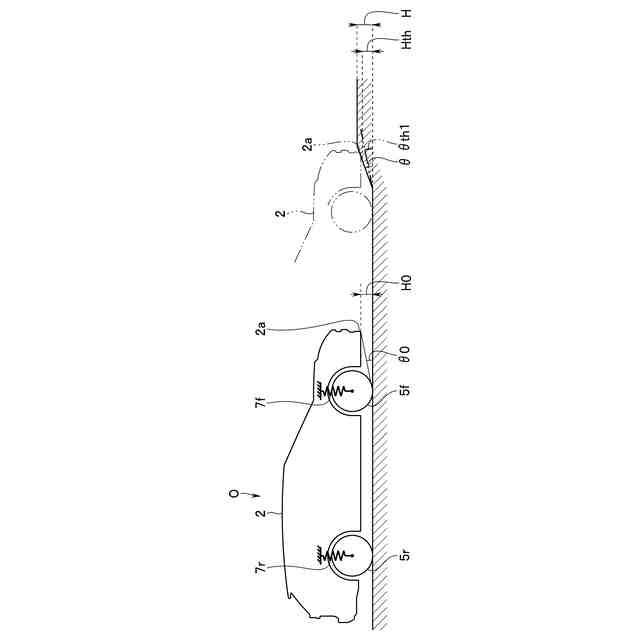
【課題】車体の底面と路面上の勾配との干渉を抑制するための車両挙動を実現することができる車両の運転支援装置を提供する。
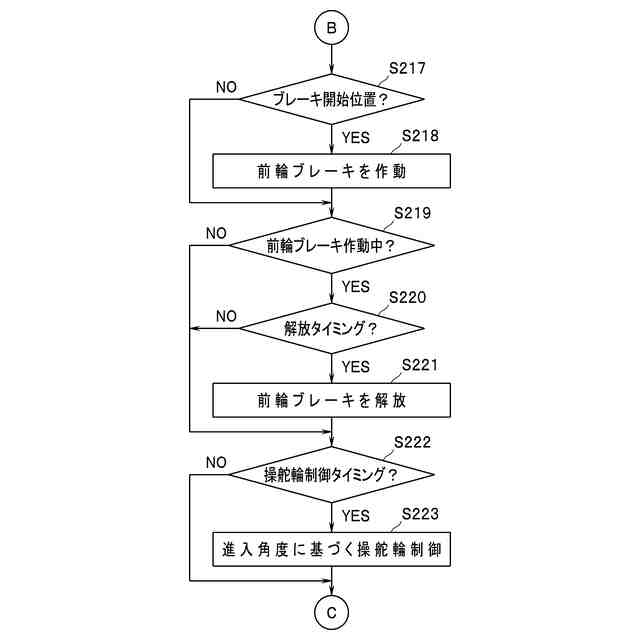
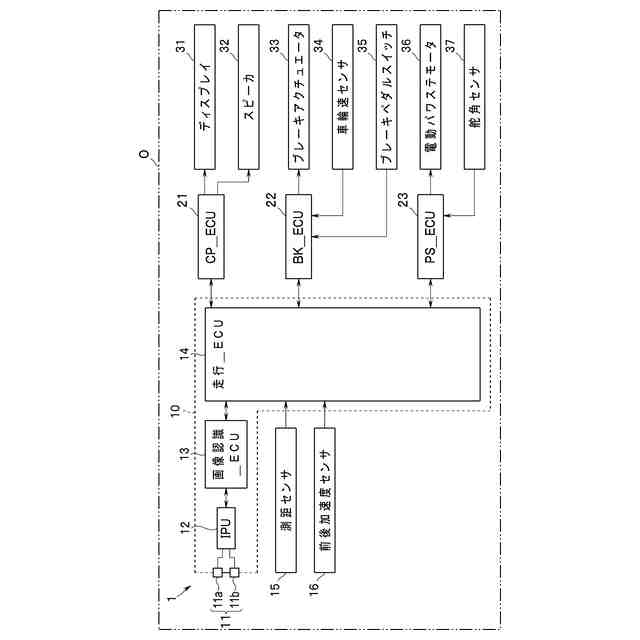
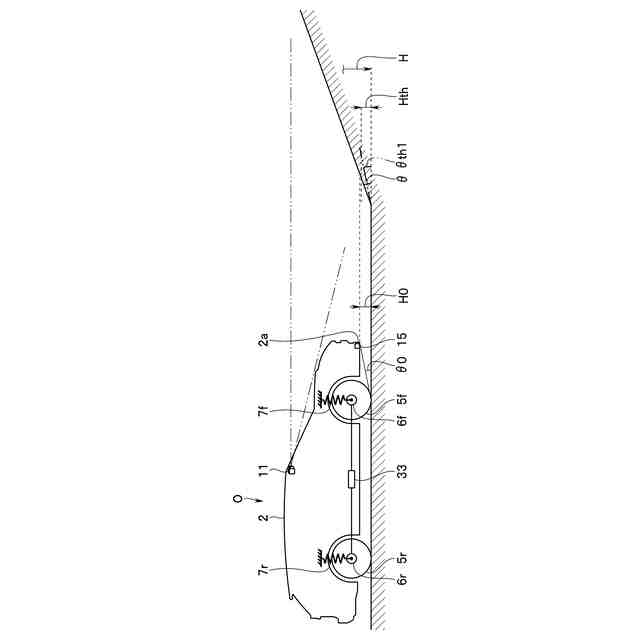
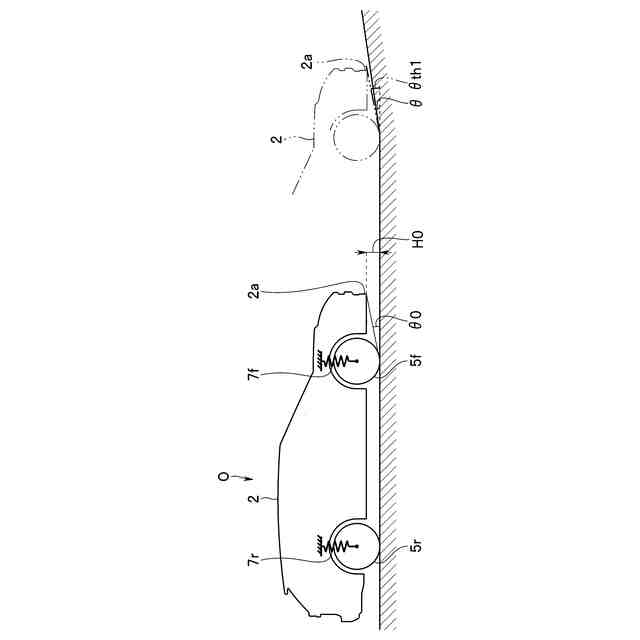
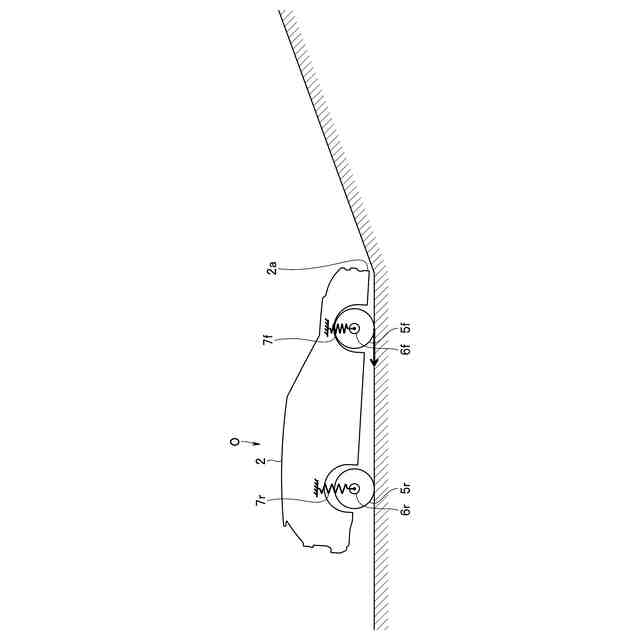
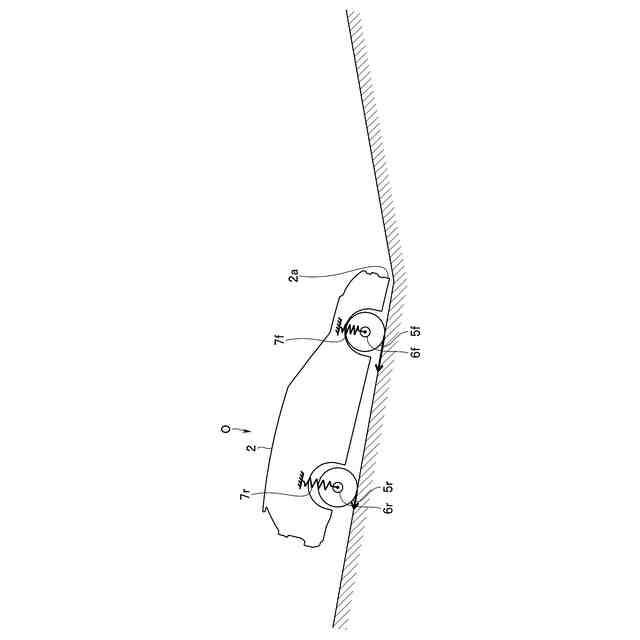
【解決手段】走行_ECU14は、自車両Oの進行方向において、自車両Oが現在走行中の路面を基準としたプラスの縦断勾配θを有する勾配路面を認識し、自車両Oが勾配路面に進入する際に、フロントバンパ2a(車体2)の底面が勾配路面と干渉するか否かの判定を行う。そして、フロントバンパ2aの底面が勾配路面と干渉すると判定したとき、走行_ECU14は、自車両Oが勾配路面に進入する直前において、前輪5fのブレーキ6fに対して制動力を発生させ、且つ、ブレーキ6fに発生させた制動力を解放する。
【選択図】図15
特許請求の範囲
【請求項1】
自車両の進行方向において、前記自車両が現在走行中の路面を基準としたプラスの縦断勾配を有する勾配路面を認識する勾配路面認識手段と、
前記自車両が前記勾配路面に進入する際に、車体の底面が前記勾配路面と干渉するか否かを判定する干渉判定手段と、
前記車体の底面が前記勾配路面と干渉すると判定したとき、前記自車両が前記勾配路面に進入する直前において、前記自車両の前輪のブレーキに対し制動力を発生させ且つ前記制動力を解放する制動制御手段と、
を備えたことを特徴とする車両の運転支援装置。
続きを表示(約 1,000 文字)
【請求項2】
前記車体の底面が前記勾配路面と干渉すると判定したとき、前記自車両が前記勾配路面に進入する際の前記前輪の進入方向を前記勾配路面の最大傾斜方向に対して傾ける舵角制御手段を備えたことを特徴とする請求項1に記載の車両の運転支援装置。
【請求項3】
前記制動制御手段は、前記自車両に制動力が発生している場合には、前記自車両が前記勾配路面に進入するよりも設定距離手前において、前記制動力を後輪のブレーキを用いて維持することを特徴とする請求項1に記載の車両の運転支援装置。
【請求項4】
自車両の進行方向において、前記自車両が現在走行中の路面を基準としたプラスの縦断勾配を有する勾配路面を認識する勾配路面認識手段と、
前記自車両が前記勾配路面に進入する際に、車体の底面が前記勾配路面と干渉するか否かを判定する干渉判定手段と、
前記車体の底面が前記勾配路面と干渉すると判定したとき、前記自車両が前記勾配路面に進入する際の前輪の進入方向を前記勾配路面の最大傾斜方向に対して傾ける舵角制御手段と、
を備えたことを特徴とする車両の運転支援装置。
【請求項5】
プロセッサを備え、
前記プロセッサは、
自車両の進行方向において、前記自車両が現在走行中の路面を基準としたプラスの縦断勾配を有する勾配路面を認識し、
前記自車両が前記勾配路面に進入する際に、車体の底面が前記勾配路面と干渉するか否かを判定し、
前記車体の底面が前記勾配路面と干渉すると判定したとき、前記自車両が前記勾配路面に進入する直前において、前記自車両の前輪のブレーキに対し制動力を発生させ且つ前記制動力を解放する、
ことを特徴とする車両の運転支援装置。
【請求項6】
プロセッサを備え、
前記プロセッサは、
自車両の進行方向において、前記自車両が現在走行中の路面を基準としたプラスの縦断勾配を有する勾配路面を認識し、
前記自車両が前記勾配路面に進入する際に、車体の底面が前記勾配路面と干渉するか否かを判定し、
前記車体の底面が前記勾配路面と干渉すると判定したとき、前記自車両が前記勾配路面に進入する際の前輪の進入方向を前記勾配路面の最大傾斜方向に対して傾ける、
ことを特徴とする車両の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車外の走行環境情報に基づいて運転支援を行う車両の運転支援装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、自動車等の車両においては、運転支援装置が搭載されている。運転支援装置は、車外の走行環境情報に基づいて、ドライバの運転負荷を軽減するための各種運転支援を行う。
【0003】
このような運転支援装置においては、運転支援の一環として、車両周辺の走行環境情報をドライバに報知するための各種技術が提案されている。例えば、特許文献1には、レーザスキャナ等を用いて路面上の勾配位置及び勾配値を取得し、取得した勾配値と車両が通過可能な基準勾配値との比較結果を、勾配位置と関連付けてドライバに報知する技術が開示されている。このような技術によれば、路面上の勾配情報をドライバに報知することにより、車体の底面と路面上の勾配との干渉を抑制することができる。
【先行技術文献】
【特許文献】
【0004】
特開2018-5437号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、車体の底面と路面上の勾配との干渉をより効果的に抑制するためには、ドライバに対する勾配情報の報知に止まらず、勾配に対する付加的な車両挙動制御を行うことが好ましい。
【0006】
本発明は、車体の底面と路面上の勾配との干渉を抑制するための車両挙動を実現することができる車両の運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様による車両の運転支援装置は、自車両の進行方向において、前記自車両が現在走行中の路面を基準としたプラスの縦断勾配を有する勾配路面を認識する勾配路面認識手段と、前記自車両が前記勾配路面に進入する際に、車体の底面が前記勾配路面と干渉するか否かを判定する干渉判定手段と、前記車体の底面が前記勾配路面と干渉すると判定したとき、前記自車両が前記勾配路面に進入する直前において、前記自車両の前輪のブレーキに対し制動力を発生させ且つ前記制動力を解放する制動制御手段と、を備えたものである。
【0008】
また、本発明の他態様による車両の運転支援装置は、自車両の進行方向において、前記自車両が現在走行中の路面を基準としたプラスの縦断勾配を有する勾配路面を認識する勾配路面認識手段と、前記自車両が前記勾配路面に進入する際に、車体の底面が前記勾配路面と干渉するか否かを判定する干渉判定手段と、前記車体の底面が前記勾配路面と干渉すると判定したとき、前記自車両が前記勾配路面に進入する際の前輪の進入方向を前記勾配路面の最大傾斜方向に対して傾ける舵角制御手段と、を備えたものである。
【0009】
また、本発明の他態様による車両の運転支援装置は、プロセッサを備え、前記プロセッサは、自車両の進行方向において、前記自車両が現在走行中の路面を基準としたプラスの縦断勾配を有する勾配路面を認識し、前記自車両が前記勾配路面に進入する際に、車体の底面が前記勾配路面と干渉するか否かを判定し、前記車体の底面が前記勾配路面と干渉すると判定したとき、前記自車両が前記勾配路面に進入する直前において、前記自車両の前輪のブレーキに対し制動力を発生させ且つ前記制動力を解放するものである。
【0010】
また、本発明の他態様による車両の運転支援装置は、プロセッサを備え、前記プロセッサは、自車両の進行方向において、前記自車両が現在走行中の路面を基準としたプラスの縦断勾配を有する勾配路面を認識し、前記自車両が前記勾配路面に進入する際に、車体の底面が前記勾配路面と干渉するか否かを判定し、前記車体の底面が前記勾配路面と干渉すると判定したとき、前記自車両が前記勾配路面に進入する際の前輪の進入方向を前記勾配路面の最大傾斜方向に対して傾けるものである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ