TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025089348
公報種別
公開特許公報(A)
公開日
2025-06-12
出願番号
2025043341,2023174069
出願日
2025-03-18,2016-05-18
発明の名称
地物認識装置、地物認識方法、プログラム、及び、記憶媒体
出願人
パイオニア株式会社
代理人
個人
主分類
G01C
21/28 20060101AFI20250605BHJP(測定;試験)
要約
【課題】外界センサによって取得した情報から効率的に地物を認識することが可能な地物認識装置を提供する。
【解決手段】地物認識装置は、移動体に配置された外界検出装置から外界情報を取得するとともに、移動体の周辺に存在する地物の位置を示す地物位置情報を取得する。そして、地物位置情報に基づいて、外界情報のうち地物を示す情報が含まれると予測される情報である予測情報を抽出し、その予測情報に基づいて地物を認識する。
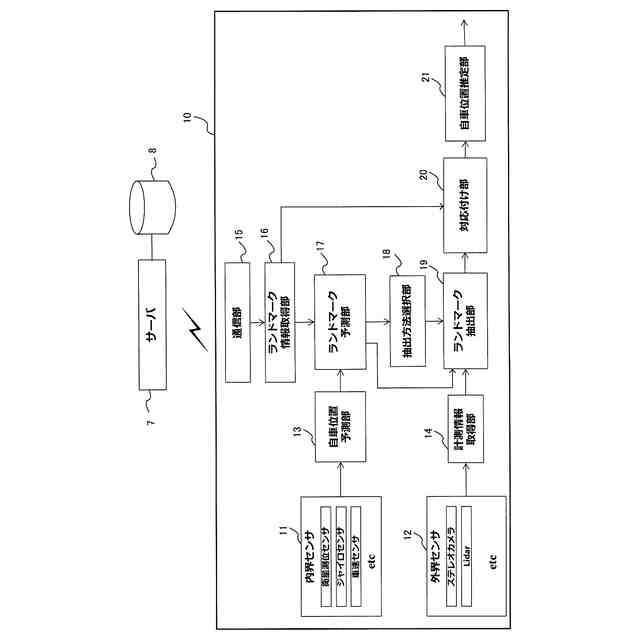
【選択図】図1
特許請求の範囲
【請求項1】
移動体に配置されたセンサによって生成された外界情報を取得する第1取得部と、
前記移動体の周辺に存在する地物の位置を示す地物位置情報と、前記地物の種類を示す種類情報を含む属性情報とを取得する第2取得部と、
前記外界情報のうち前記地物が存在すると予測される範囲であり、かつ、前記地物位置情報に基づいて決定された範囲である地物予測範囲から、前記種類情報に基づいて決定された前記地物を認識する認識方法により、前記地物を認識する認識部と、
を備える地物認識装置。
続きを表示(約 850 文字)
【請求項2】
前記属性情報は、前記種類に応じて定められた特徴情報をさらに含み、
前記認識部は、前記特徴情報に基づき前記地物を認識することを特徴とする請求項1に記載の地物認識装置。
【請求項3】
前記センサは、前記地物で反射した光を用いて外界情報を生成することを特徴とする請求項1に記載の地物認識装置。
【請求項4】
前記センサは、前記光を照射する照射部を有し、前記光が前記地物で反射した光を用いて外界情報を生成することを特徴とする請求項3に記載の地物認識装置。
【請求項5】
移動体に配置されたセンサによって生成された外界情報を取得する第1取得工程と、
前記移動体の周辺に存在する地物の位置を示す地物位置情報と、前記地物の種類を示す種類情報を含む属性情報とを取得する第2取得工程と、
前記外界情報のうち前記地物が存在すると予測される範囲であり、かつ、前記地物位置情報に基づいて決定された範囲である地物予測範囲から、前記種類情報に基づいて決定された前記地物を認識する認識方法により、前記地物を認識する認識工程と、
を備える地物認識方法。
【請求項6】
コンピュータを備える地物認識装置により実行されるプログラムは、
移動体に配置されたセンサによって生成された外界情報を取得する第1取得部、
前記移動体の周辺に存在する地物の位置を示す地物位置情報と、前記地物の種類を示す種類情報を含む属性情報とを取得する第2取得部、
前記外界情報のうち前記地物が存在すると予測される範囲であり、かつ、前記地物位置情報に基づいて決定された範囲である地物予測範囲から、前記種類情報に基づいて決定された前記地物を認識する認識方法により、前記地物を認識する認識部、
として前記コンピュータを機能させるプログラム。
【請求項7】
請求項6に記載のプログラムを記憶した記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、地物を認識する技術に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、車両位置を推定する技術として、例えば特許文献1が知られている。特許文献1の手法は、複数のランドマークの車両に対する距離及び方向に基づいて車両に対する複数のランドマークの位置を検出し、検出した複数のランドマークのうちの少なくとも一対のランドマークの位置と地図上のランドマークの位置との照合結果に基づいて車両の現在位置を推定している。
【先行技術文献】
【特許文献】
【0003】
特開2015-222223号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような技術においては、外界センサによって得た情報からランドマークの位置を検出する場合に、計測された情報全体から、対象となるランドマークを抽出、認識する処理を行うことが一般的であり、効率化の面で改良の余地がある。
【0005】
本発明が解決しようとする課題としては、上記のものが例として挙げられる。本発明は、外界センサによって取得した情報から効率的に地物を認識することが可能な地物認識装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項に記載の発明は、地物認識装置であって、移動体に配置されたセンサによって生成された外界情報を取得する第1取得部と、前記移動体の周辺に存在する地物の位置を示す地物位置情報と、前記地物の種類を示す種類情報を含む属性情報とを取得する第2取得部と、前記外界情報のうち前記地物が存在すると予測される範囲であり、かつ、前記地物位置情報に基づいて決定された範囲である地物予測範囲から、前記種類情報に基づいて決定された前記地物を認識する認識方法により、前記地物を認識する認識部と、を備える。
【0007】
請求項に記載の発明は、地物認識方法であって、移動体に配置されたセンサによって生成された外界情報を取得する第1取得工程と、前記移動体の周辺に存在する地物の位置を示す地物位置情報と、前記地物の種類を示す種類情報を含む属性情報とを取得する第2取得工程と、前記外界情報のうち前記地物が存在すると予測される範囲であり、かつ、前記地物位置情報に基づいて決定された範囲である地物予測範囲から、前記種類情報に基づいて決定された前記地物を認識する認識方法により、前記地物を認識する認識工程と、を備える。
【0008】
請求項に記載の発明は、コンピュータを備える地物認識装置により実行されるプログラムは、移動体に配置されたセンサによって生成された外界情報を取得する第1取得部、前記移動体の周辺に存在する地物の位置を示す地物位置情報と、前記地物の種類を示す種類情報を含む属性情報とを取得する第2取得部、前記外界情報のうち前記地物が存在すると予測される範囲であり、かつ、前記地物位置情報に基づいて決定された範囲である地物予測範囲から、前記種類情報に基づいて決定された前記地物を認識する認識方法により、前記地物を認識する認識部、として前記コンピュータを機能させる。
【図面の簡単な説明】
【0009】
実施例に係る自車位置推定装置の構成を示すブロック図である。
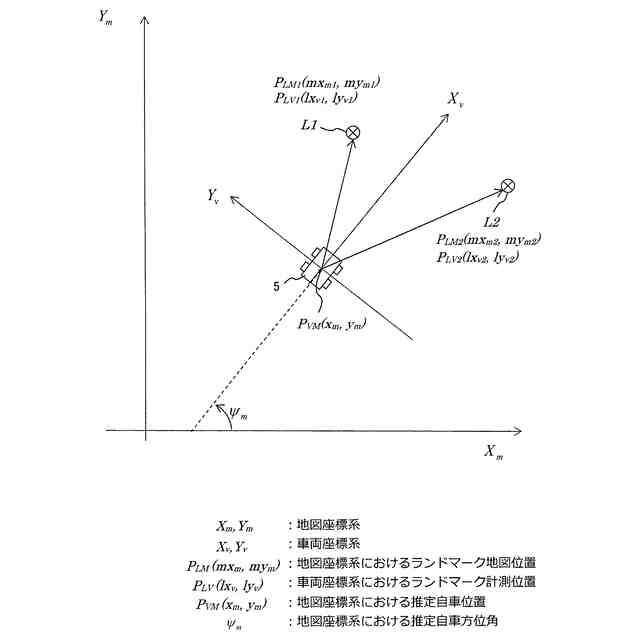
ランドマーク予測範囲の決定方法を説明する図である。
ランドマーク抽出処理の一例を示す。
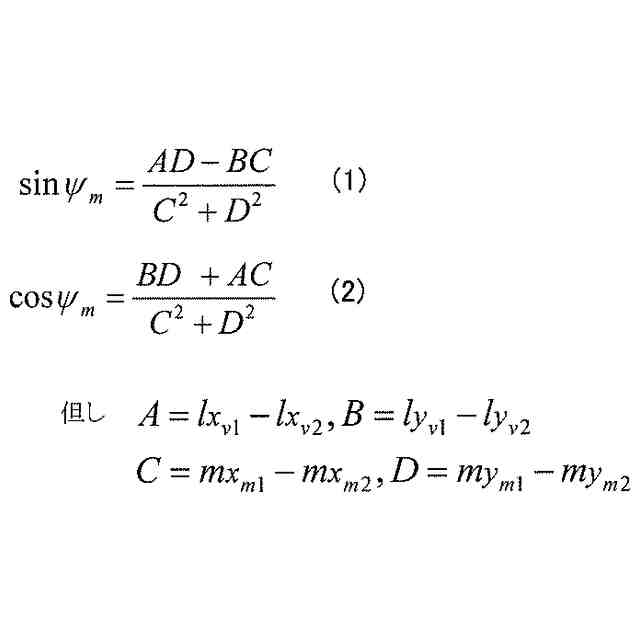
自車位置を推定する方法を説明する図である。
自車位置推定処理のフローチャートである。
【発明を実施するための形態】
【0010】
本発明の好適な実施形態では、地物認識装置は、移動体に配置された外界検出装置によって出力される外界情報を取得する第1取得部と、前記移動体の周辺に存在する地物の位置を示す地物位置情報を取得する第2取得部と、前記地物位置情報に基づいて、前記外界情報のうち前記地物を示す情報が含まれると予測される情報である予測情報を抽出し、前記予測情報に基づいて前記地物を認識する認識部と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る





 特許ウォッチ
特許ウォッチ