TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087436
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023202093
出願日
2023-11-29
発明の名称
基板処理装置
出願人
株式会社SCREENホールディングス
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H01L
21/677 20060101AFI20250603BHJP(基本的電気素子)
要約
【課題】基板への接触を回避できる基板処理装置を提供する。
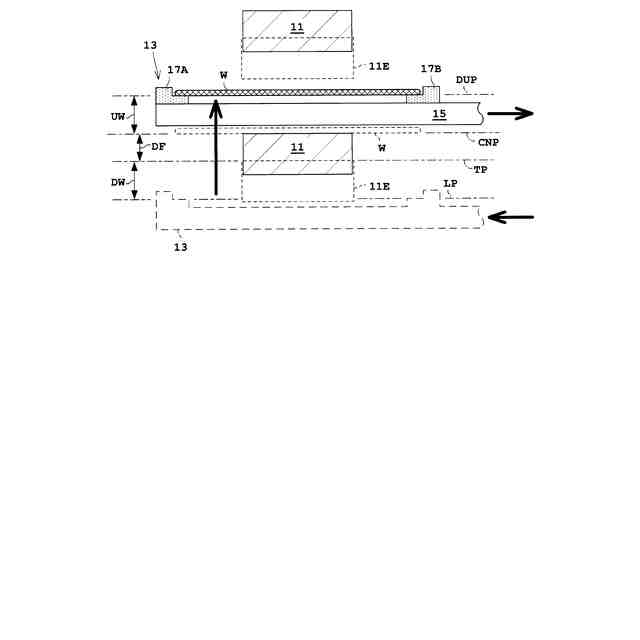
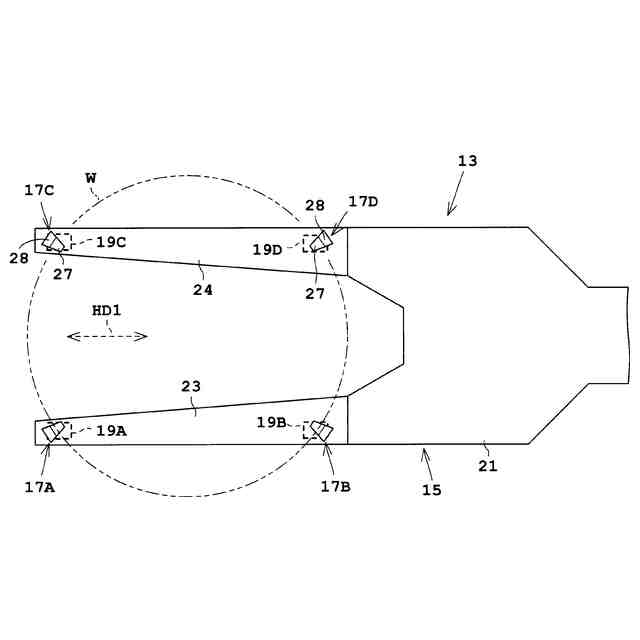
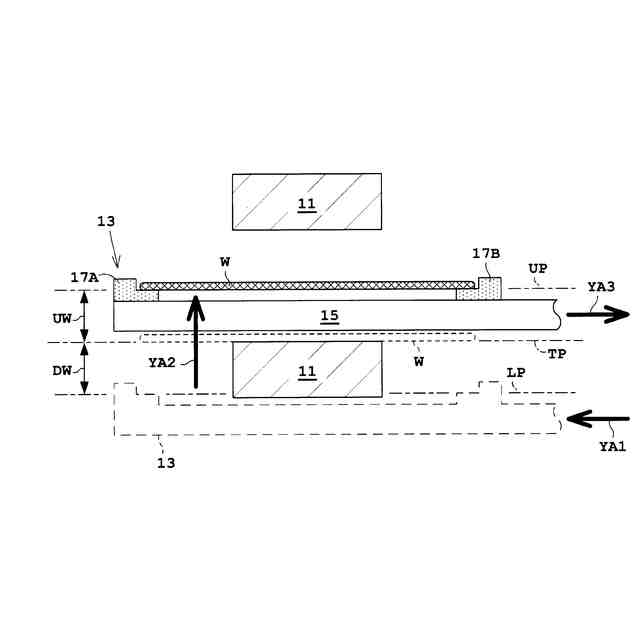
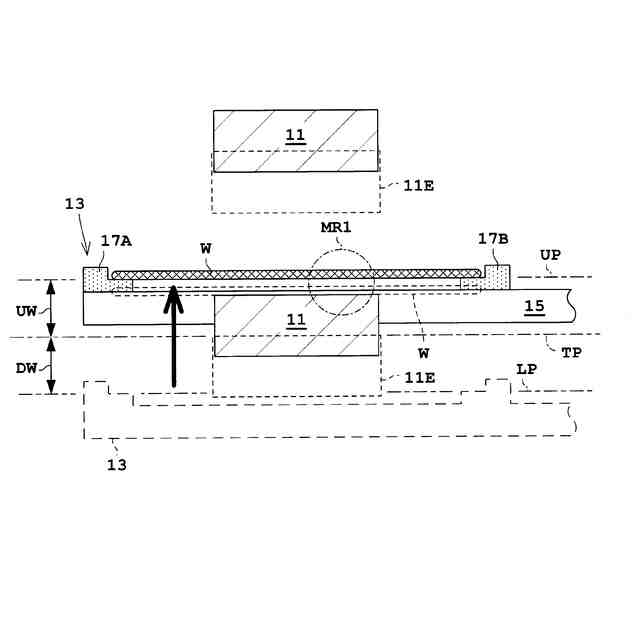
【解決手段】基板処理装置の制御部は、複数個の棚部11のうちの1個の棚部11から基板Wを取るために、基板Wを支持していないハンド13をキャリア内に進入させ、触覚センサ19Aからの出力を監視しながら、キャリア内においてハンド13を上昇させ、触覚センサ19Aが基板Wとの接触を検出したときは、接触を検出した接触高さ位置CNPから予め設定された上側移動量UWによりハンド13を上昇させ、接触高さ位置CNPから上側移動量UWにより上昇された上昇位置DUPで、基板Wを支持するハンド13をキャリア内から退出させる。
【選択図】図10
特許請求の範囲
【請求項1】
基板を処理する基板処理装置において、
キャリアを載置するキャリア載置部と、
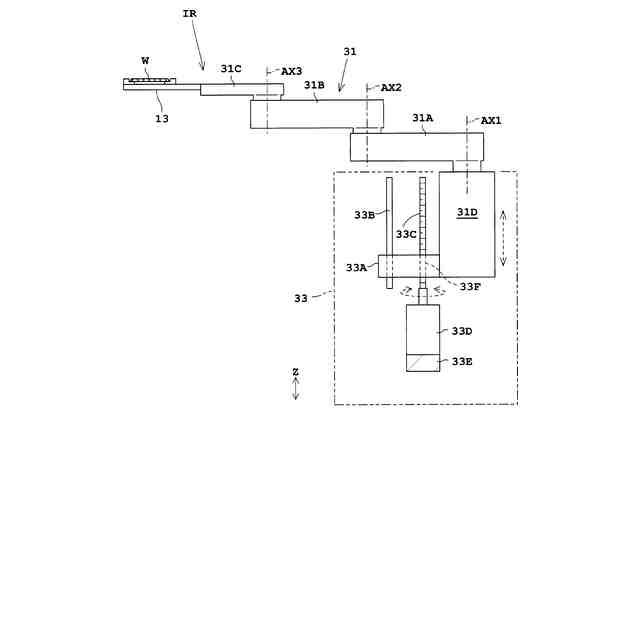
前記基板を水平姿勢で支持するハンドを備えて、前記ハンドを移動させる基板搬送ロボットと、
前記基板搬送ロボットを制御する制御部と、を備え、
前記キャリアは、前記キャリア内で上下方向に設けられて前記基板を水平姿勢で各々載置することができる複数個の棚部を備え、
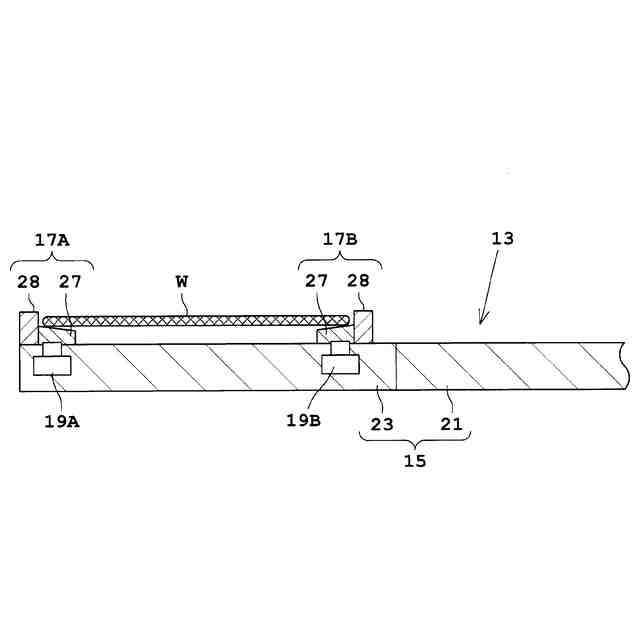
前記ハンドは、ハンド本体と、
前記ハンド本体の上面に設けられて前記基板を受けるガイドと、
前記ガイドが前記基板と接触したこと検出するセンサと、を備え、
前記制御部は、
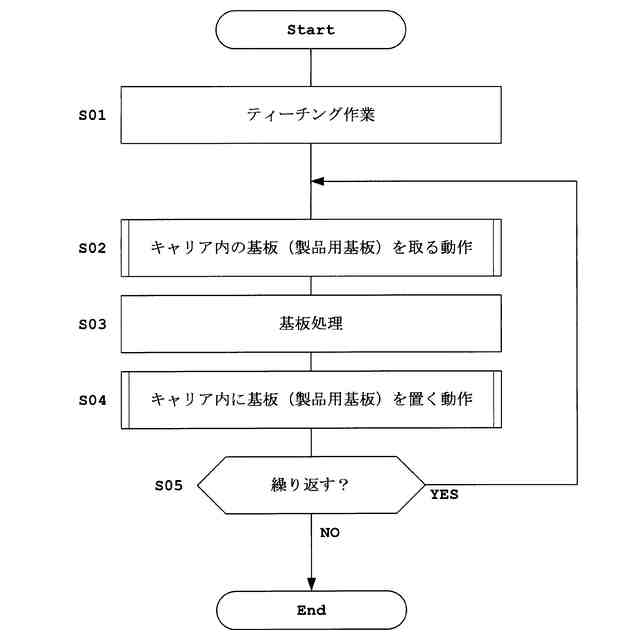
前記複数個の棚部のうちの1個の棚部から前記基板を取るために、前記基板を支持していない前記ハンドを前記キャリア内に進入させ、
前記センサからの出力を監視しながら、前記キャリア内において前記ハンドを上昇させ、
前記センサが前記基板との接触を検出したときは、前記接触を検出した接触高さ位置から予め設定された上側移動量により前記ハンドを上昇させ、
前記接触高さ位置から前記上側移動量により上昇された上昇位置で、前記基板を支持する前記ハンドを前記キャリア内から退出させることを特徴とする基板処理装置。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の基板処理装置において、
前記制御部は、
前記複数個の棚部のうちの1個の棚部に前記基板を置くために、前記基板を支持する前記ハンドを前記キャリア内に進入させ、
前記センサからの出力を監視しながら、前記キャリア内において前記ハンドを下降させ、
前記センサが前記基板から前記ハンドの分離を検出したときは、前記分離を検出した分離高さ位置から予め設定された下側移動量により前記ハンドを下降させ、
前記分離高さ位置から前記下側移動量により下降された下降位置で、前記基板を支持していない前記ハンドを前記キャリア内から退出させることを特徴とする基板処理装置。
【請求項3】
請求項1に記載の基板処理装置において、
前記制御部は、前記複数個の棚部のうちの1個の棚部に前記基板を置くために、前記接触高さ位置から前記上側移動量により上昇された前記上昇位置で、前記基板を支持する前記ハンドを前記キャリア内に進入させることを特徴とする基板処理装置。
【請求項4】
請求項3に記載の基板処理装置において、
前記制御部は、
前記キャリア内において、前記上昇位置から、前記接触高さ位置から予め設定された下側移動量により下降された下降位置に前記ハンドを下降させ、
前記下降位置で、前記基板を支持していない前記ハンドを前記キャリア内から退出させることを特徴とする基板処理装置。
【請求項5】
請求項3に記載の基板処理装置において、
前記制御部は、
前記センサからの出力を監視しながら、前記キャリア内において前記ハンドを下降させ、
前記センサが前記基板からの前記ハンドの分離を検出したときは、前記分離を検出した分離高さ位置から予め設定された下側移動量により前記ハンドを下降させ、
前記分離高さ位置から前記下側移動量により下降された下降位置で、前記基板を支持していない前記ハンドを前記キャリア内から退出させることを特徴とする基板処理装置。
【請求項6】
請求項1から5のいずれかに記載の基板処理装置において、
前記制御部は、前記複数個の棚部のうちの1個の棚部から前記基板を取るために、予めティーチングされたティーチング高さ位置から予め設定された下側移動量により下降させた下位置で、前記基板を支持していない前記ハンドを前記キャリア内に進入させることを特徴とする基板処理装置。
【請求項7】
請求項1から5のいずれかに記載の基板処理装置において、
前記ハンドは、前記ガイドを含む複数個のガイドを備え、
前記複数個のガイドは、前記ガイド本体の上面に設けられて前記基板の外縁部を受け、
前記センサは、前記複数個のガイドのうちの1個のガイドが前記基板と接触したことを検出することを特徴とする基板処理装置。
【請求項8】
請求項1から5のいずれかに記載の基板処理装置において、
前記ハンドは、前記ガイドを含む複数個のガイドと、
前記センサを含む複数個のセンサと、を備え、
前記複数個のガイドは、前記ガイド本体の上面に設けられて前記基板の外縁部を受け、
前記複数個のセンサは、前記複数個のガイドにそれぞれ設けられ、
前記複数個のセンサは各々、前記複数個のガイドのうちの対応するガイドが前記基板と接触したことを検出し、
前記制御部は、
前記複数個のセンサからの出力を監視しながら、前記キャリア内において前記ハンドを上昇させ、
前記複数個のセンサの少なくとも1つが前記基板との接触を検出したときは、前記接触を検出した前記接触高さ位置から予め設定された前記上側移動量により前記ハンドを上昇させることを特徴とする基板処理装置。
【請求項9】
請求項8に記載の基板処理装置において、
前記制御部は、前記複数個のセンサの1つが前記基板との最初の接触を検出したときは、前記接触を検出した接触高さ位置から予め設定された上側移動量により前記ハンドを上昇させることを特徴とする基板処理装置。
【請求項10】
請求項1から5のいずれかに記載の基板処理装置において、
前記センサは、触覚センサであることを特徴とする基板処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、基板を処理する基板処理装置に関する。基板は、例えば、半導体基板、FPD(Flat Panel Display)用の基板、フォトマスク用ガラス基板、光ディスク用基板、磁気ディスク用基板、セラミック基板、太陽電池用基板などが挙げられる。FPDは、例えば、液晶表示装置、有機EL(electroluminescence)表示装置などが挙げられる。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
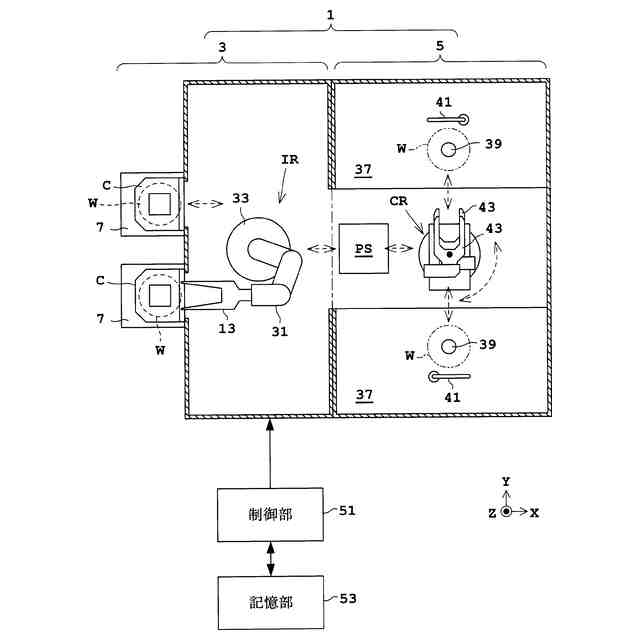
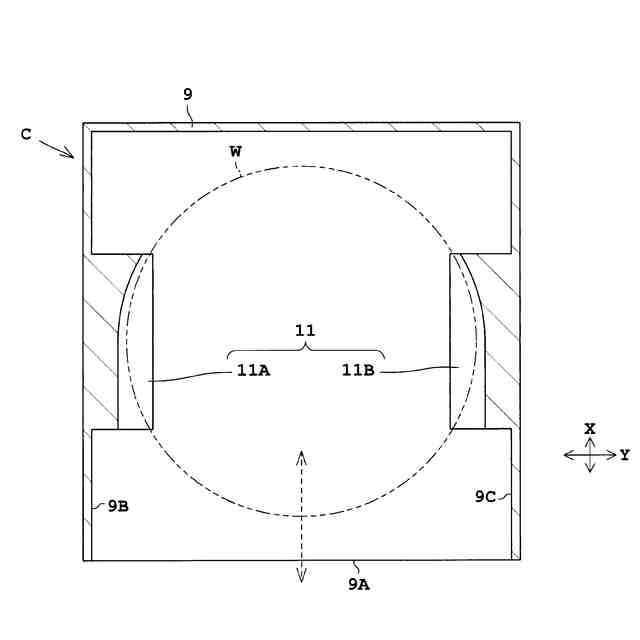
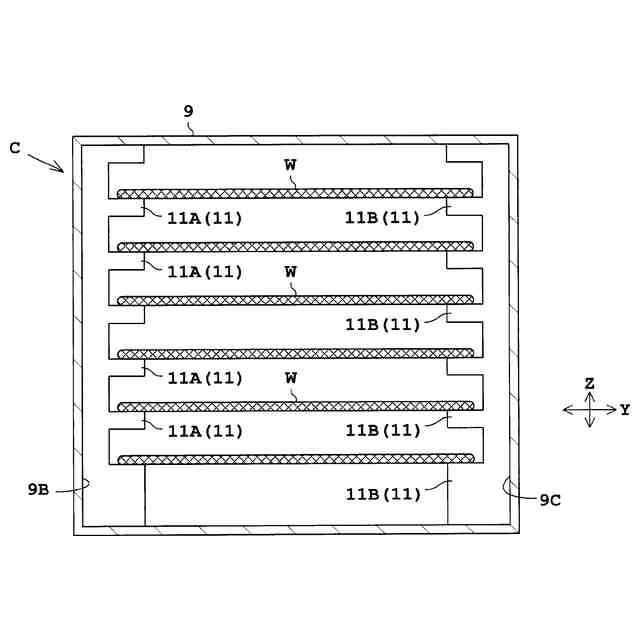
従来の基板処理装置は、キャリアを載置するキャリア載置部と、キャリア載置部上のキャリアから基板を搬送する搬送機構を備える(例えば、特許文献1参照)。キャリアは、容器と複数の棚を備える。複数の棚は、容器の内部に設置され、また、上下方向に並ぶように配置される。搬送機構は、1枚の基板を水平姿勢で支持するハンドを備える。基板は、形状によって、複数の種類に分類される。基板処理装置は、基板の形状(種類)に応じて、キャリアの上下方向に隣り合う2つの棚の間にハンドを挿入するときのハンドの高さ位置を変える。
【0003】
特許文献2には、ロボットハンドを備えた基板搬送ロボットが開示されている。ロボットハンドは、基板を載せる部分であるY字状のハンド本体部を備える。ハンド本体部には、基板の下面に接触して支持するための3つの触覚センサが設けられている。触覚センサのセンサ素子は、基板から加えられた力を3軸方向(X軸方向、Y軸方向およびZ軸方向)で検知することができる。
【先行技術文献】
【特許文献】
【0004】
特開2021-048359号公報
特開2022-091240号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来の基板処理装置は、次の問題がある。基板搬送ロボット(搬送機構)は、ティーチングされた基準高さ位置から上側移動量でハンドを上昇させることで、キャリア内の基板を取る動作を行う。また、基板搬送ロボットは、その基準高さ位置から下側移動量でハンドを下降させることで、キャリア内に基板を置く動作を行う。
【0006】
ティーチングされた基準高さ位置は、キャリア内の基板の下面にハンドが接触する高さ位置で決定される。しかし、キャリアには個体差がある。そのため、ティーチングされた基準高さ位置と実際の接触高さ位置とが同じにならないことが多い。その結果、例えば、キャリア内からハンドを退出させるときに、ハンドが支持する基板がキャリア内の棚部に接触して擦れる可能性がある。また、例えば、キャリア内からハンドを退出させるときに、キャリア内の棚部に基板を置いた後のハンドが、その基板に接触して擦れる可能性がある。
【0007】
これは、特殊な形状の基板(複数枚の基板を貼り合わせた厚基板または反っている基板)の場合に接触して擦れる可能性がより高くなる。
【0008】
本発明は、このような事情に鑑みてなされたものであって、基板への接触を回避できる基板処理装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、このような目的を達成するために、次のような構成をとる。すなわち、本発明に係る、基板を処理する基板処理装置は、キャリアを載置するキャリア載置部と、前記基板を水平姿勢で支持するハンドを備えて、前記ハンドを移動させる基板搬送ロボットと、前記基板搬送ロボットを制御する制御部と、を備え、前記キャリアは、前記キャリア内で上下方向に設けられて前記基板を水平姿勢で各々載置することができる複数個の棚部を備え、前記ハンドは、ハンド本体と、前記ハンド本体の上面に設けられて前記基板を受けるガイドと、前記ガイドが前記基板と接触したこと検出するセンサと、を備え、前記制御部は、前記複数個の棚部のうちの1個の棚部から前記基板を取るために、前記基板を支持していない前記ハンドを前記キャリア内に進入させ、前記センサからの出力を監視しながら、前記キャリア内において前記ハンドを上昇させ、前記センサが前記基板との接触を検出したときは、前記接触を検出した接触高さ位置から予め設定された上側移動量により前記ハンドを上昇させ、前記接触高さ位置から前記上側移動量により上昇された上昇位置で、前記基板を支持する前記ハンドを前記キャリア内から退出させることを特徴とするものである。
【0010】
本発明に係る基板処理装置によれば、棚部から基板を取るために、ハンドは、センサが基板との接触を検出した実際の接触高さ位置から上側移動量により上昇される。また、基板を支持するハンドは、実際の接触高さ位置から上側移動量により上昇された上昇位置で、キャリア内から退出させる。そのため、基板を保持するハンドをキャリア内から退出させる際に、キャリアに個体差があったり、特殊な形状の基板を用いたりしても、例えばハンドが支持する基板が棚部に接触することを回避できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ