TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025086759
公報種別
公開特許公報(A)
公開日
2025-06-09
出願番号
2023201027
出願日
2023-11-28
発明の名称
補正装置、及び、補正方法
出願人
日野自動車株式会社
代理人
個人
,
個人
,
個人
主分類
F02D
45/00 20060101AFI20250602BHJP(燃焼機関;熱ガスまたは燃焼生成物を利用する機関設備)
要約
【課題】より適切な補正が可能な補正装置、及び補正方法を提供する。
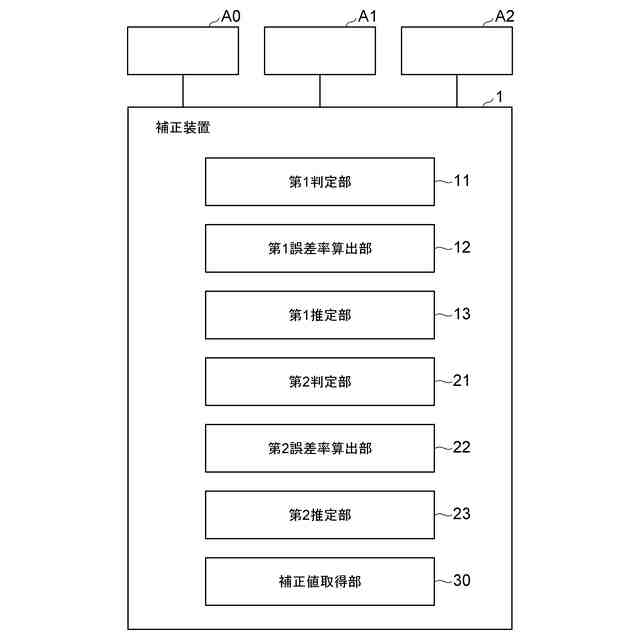
【解決手段】補正装置1、第1系統に属する吸気圧センサA1と、第1系統から独立した第2系統に属する空燃比センサA2とのそれぞれのセンサ値に基づいて、別個に吸気量を推定し、当該推定された吸気量と吸気量センサA0のセンサ値との誤差率である第1誤差率及び第2誤差率を算出する。また、補正装置1は、第1誤差率と吸気量センサA0のセンサ値とに基づいて、吸気量の推定量である第1推定量を取得すると共に、第2誤差率と吸気量センサA0のセンサ値とに基づいて、吸気量の推定量である第2推定量を取得する。そして、補正装置1は、吸気量センサA0のセンサ値、第1推定量、及び、第2推定量のそれぞれを重み付けしつつ合算することで、吸気量の補正値を取得する。
【選択図】図2
特許請求の範囲
【請求項1】
空気の導入を受ける装置において空気導入量を取得する導入量センサの補正を行うための補正装置であって、
前記導入量センサと異なるセンサであって、第1系統に属する第1センサのセンサ値に基づいて前記空気導入量を推定し、当該推定された前記空気導入量と前記導入量センサのセンサ値との誤差率である第1誤差率を算出する第1誤差率算出部と、
前記導入量センサのセンサ値と前記第1誤差率とに基づいて、前記空気導入量の推定量である第1推定量を取得する第1推定部と、
前記導入量センサと異なるセンサであって、前記第1系統から独立した第2系統に属する第2センサのセンサ値に基づいて前記空気導入量を推定し、当該推定された前記空気導入量と前記導入量センサのセンサ値との誤差率である第2誤差率を算出する第2誤差率算出部と、
前記導入量センサのセンサ値と前記第2誤差率とに基づいて、前記空気導入量の推定量である第2推定量を取得する第2推定部と、
前記導入量センサのセンサ値、前記第1推定量、及び、前記第2推定量のそれぞれを重み付けしつつ合算することで、前記空気導入量の補正値を取得する補正値取得部と、
を備える補正装置。
続きを表示(約 1,200 文字)
【請求項2】
前記第1推定部は、前回算出された前記第1誤差率に対して、今回算出された前記第1誤差率を1未満の割合で反映させることで第3誤差率を生成すると共に、当該第3誤差率を前記導入量センサのセンサ値にかけて前記第1推定量を取得し、
前記第2推定部は、前回算出された前記第2誤差率に対して、今回算出された前記第2誤差率を1未満の割合で反映させることで第4誤差率を生成すると共に、当該第4誤差率を前記導入量センサのセンサ値にかけて前記第2推定量を取得する、
請求項1に記載の補正装置。
【請求項3】
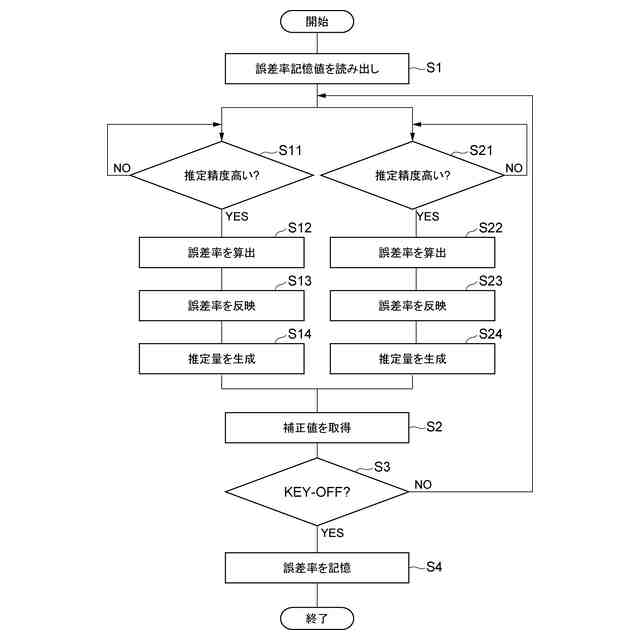
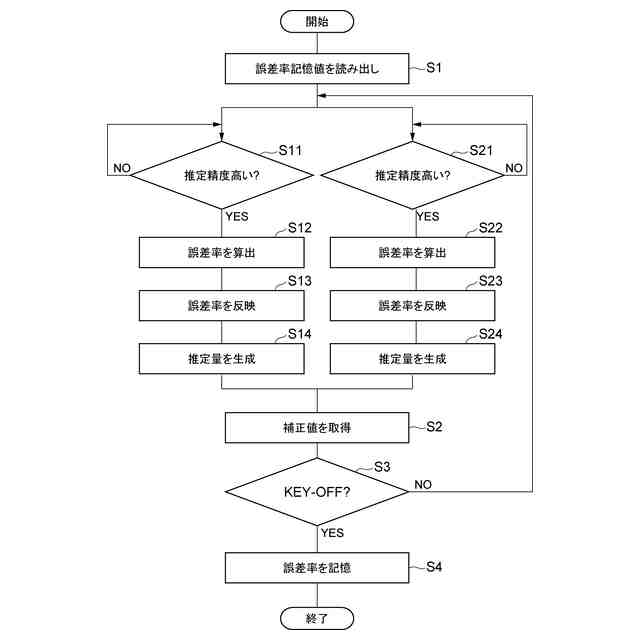
前記第1誤差率算出部における前記空気導入量の推定精度が高い状態であるか否かを判定する第1判定部と、
前記第2誤差率算出部における前記空気導入量の推定精度が高い状態であるか否かを判定する第2判定部と、
を備え、
前記第1誤差率算出部は、前記第1判定部が前記空気導入量の推定精度が高いと判定した場合に、前記空気導入量の推定及び第1誤差率の算出を行い、
前記第2誤差率算出部は、前記第2判定部が前記空気導入量の推定精度が高いと判定した場合に、前記空気導入量の推定及び第2誤差率の算出を行う、
請求項1に記載の補正装置。
【請求項4】
前記装置は、車両に搭載されたエンジンであり、
前記空気導入量は、前記エンジンの吸気量であり、
前記導入量センサは、前記エンジンおいて前記吸気量を取得する吸気量センサである、
請求項1~3のいずれか一項に記載の補正装置。
【請求項5】
空気の導入を受ける装置において空気導入量を取得する導入量センサの補正を行うための補正方法であって、
前記導入量センサと異なるセンサであって、第1系統に属する第1センサのセンサ値に基づいて前記空気導入量を推定し、当該推定された前記空気導入量と前記導入量センサのセンサ値との誤差率である第1誤差率を算出する第1誤差率算出ステップと、
前記第1誤差率算出ステップの後に、前記導入量センサのセンサ値と前記第1誤差率とに基づいて、前記空気導入量の推定量である第1推定量を取得する第1推定ステップと、
前記導入量センサと異なるセンサであって、前記第1系統から独立した第2系統に属する第2センサのセンサ値に基づいて前記空気導入量を推定し、当該推定された前記空気導入量と前記導入量センサのセンサ値との誤差率である第2誤差率を算出する第2誤差率算出ステップと、
前記第2誤差率算出ステップの後に、前記導入量センサのセンサ値と前記第2誤差率とに基づいて、前記空気導入量の推定量である第2推定量を取得する第2推定ステップと、
前記第1推定ステップ、及び、前記第2推定ステップの後に、前記導入量センサのセンサ値、前記第1推定量、及び、前記第2推定量のそれぞれを重み付けしつつ合算することで、前記空気導入量の補正値を取得する補正値取得ステップと、
を備える補正方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、補正装置、及び、補正方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
特許文献1には、内燃機関の吸入空気量を検出する空気量センサの誤差を補償する学習制御を行う吸気制御装置が記載されている。この装置は、空燃比センサにより検出された内燃機関の排気ガスの空燃比と、内燃機関の燃料噴射量とに基づいて、吸入空気量の推定値を算出している。また、この装置では、算出された吸入空気量の推定値等に基づいて、空気量センサによる吸入空気量の検出値である実測空気量を補正する。
【先行技術文献】
【特許文献】
【0003】
特許第7088093号
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に記載の装置のように、空気量センサの補正を、空燃比センサを含む1系統の検出値に基づいて行う場合、当該空燃比センサの誤差がそのまま補正値に影響してしまう。したがって、空燃比センサの誤差が補正対象の空気量センサの誤差を越える場合には、誤差が増大する等、適切な補正を行うことが困難な場合がある。このように空気量センサの誤差が増大すると、内部の認識値がずれて、意図しない結果が生じるおそれがある。
【0005】
そこで、本発明は、より適切な補正が可能な補正装置、及び補正方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る補正装置は、[1]「空気の導入を受ける装置において空気導入量を取得する導入量センサの補正を行うための補正装置であって、前記導入量センサと異なるセンサであって、第1系統に属する第1センサのセンサ値に基づいて前記空気導入量を推定し、当該推定された前記空気導入量と前記導入量センサのセンサ値との誤差率である第1誤差率を算出する第1誤差率算出部と、前記導入量センサのセンサ値と前記第1誤差率とに基づいて、前記空気導入量の推定量である第1推定量を取得する第1推定部と、前記導入量センサと異なるセンサであって、前記第1系統から独立した第2系統に属する第2センサのセンサ値に基づいて前記空気導入量を推定し、当該推定された前記空気導入量と前記導入量センサのセンサ値との誤差率である第2誤差率を算出する第2誤差率算出部と、前記導入量センサのセンサ値と前記第2誤差率とに基づいて、前記空気導入量の推定量である第2推定量を取得する第2推定部と、前記導入量センサのセンサ値、前記第1推定量、及び、前記第2推定量のそれぞれを重み付けしつつ合算することで、前記空気導入量の補正値を取得する補正値取得部と、を備える補正装置」である。
【0007】
本発明に係る補正方法は、[5]「空気の導入を受ける装置において空気導入量を取得する導入量センサの補正を行うための補正方法であって、前記導入量センサと異なるセンサであって、第1系統に属する第1センサのセンサ値に基づいて前記空気導入量を推定し、当該推定された前記空気導入量と前記導入量センサのセンサ値との誤差率である第1誤差率を算出する第1誤差率算出ステップと、前記第1誤差率算出ステップの後に、前記導入量センサのセンサ値と前記第1誤差率とに基づいて、前記空気導入量の推定量である第1推定量を取得する第1推定ステップと、前記導入量センサと異なるセンサであって、前記第1系統から独立した第2系統に属する第2センサのセンサ値に基づいて前記空気導入量を推定し、当該推定された前記空気導入量と前記導入量センサのセンサ値との誤差率である第2誤差率を算出する第2誤差率算出ステップと、前記第2誤差率算出ステップの後に、前記導入量センサのセンサ値と前記第2誤差率とに基づいて、前記空気導入量の推定量である第2推定量を取得する第2推定ステップと、前記第1推定ステップ、及び、前記第2推定ステップの後に、前記導入量センサのセンサ値、前記第1推定量、及び、前記第2推定量のそれぞれを重み付けしつつ合算することで、前記空気導入量の補正値を取得する補正値取得ステップと、を備える補正方法」である。
【0008】
これらの装置及び方法は、空気の導入を受ける装置において空気導入量を取得する導入量センサの補正を行うためのものである。具体的には、導入量センサと異なるセンサであって、第1系統に属する第1センサと、導入量センサと異なるセンサであって、第1系統から独立した第2系統に属する第2センサとのそれぞれのセンサ値に基づいて、別個に空気導入量を推定し、当該推定された空気導入量と導入量センサのセンサ値との誤差率である第1誤差率及び第2誤差率を算出する。また、第1誤差率と導入量センサのセンサ値とに基づいて、空気導入量の推定量である第1推定量を取得すると共に、第2誤差率と導入量センサのセンサ値とに基づいて、空気導入量の推定量である第2推定量を取得する。そして、導入量センサのセンサ値、第1推定量、及び、第2推定量のそれぞれを重み付けしつつ合算することで、空気導入量の補正値を取得する。
【0009】
このように、互いに独立した少なくとも2系統のセンサのセンサ値のそれぞれに基づいて誤差率を算出し、当該誤差率に基づいて、導入量センサの空気導入量の補正値を取得することで、各センサの誤差が平均化されてより実値に近い補正値を取得することが可能となる。よって、これらの装置及び方法によれば、導入量センサのより適切な補正が可能となる。
【0010】
本発明に係る補正装置は、[2]「前記第1推定部は、前回算出された前記第1誤差率に対して、今回算出された前記第1誤差率を1未満の割合で反映させることで第3誤差率を生成すると共に、当該第3誤差率を前記導入量センサのセンサ値にかけて前記第1推定量を取得し、前記第2推定部は、前回算出された前記第2誤差率に対して、今回算出された前記第2誤差率を1未満の割合で反映させることで第4誤差率を生成すると共に、当該第4誤差率を前記導入量センサのセンサ値にかけて前記第2推定量を取得する、上記[1]に記載の補正装置」であってもよい。この場合、誤差率の算出のある回において特異的な値が算出された場合であっても、当該特定的な誤差率の影響が緩和される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ