TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025081900
公報種別
公開特許公報(A)
公開日
2025-05-28
出願番号
2023194970
出願日
2023-11-16
発明の名称
路面状態検出システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人中部国際特許事務所
主分類
E01C
23/01 20060101AFI20250521BHJP(道路,鉄道または橋りょうの建設)
要約
【課題】路面の補修計画の検討に役立つデータを収集することができる路面状態検出システムを提供する。
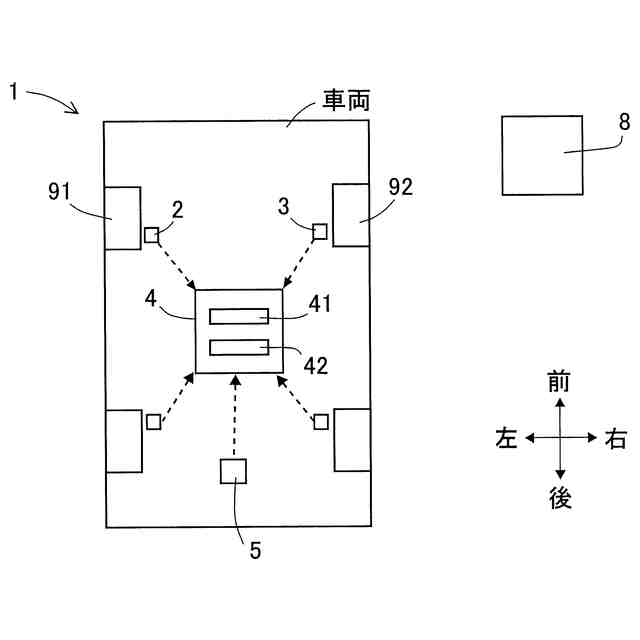
【解決手段】本発明は、自車両の位置を検出する位置検出装置5と、自車両の車輪速度を検出する車輪速度センサ2、3と、車輪速度から車輪加速度を演算する車載コンピュータ4と、を備え、車載コンピュータ4は、車輪加速度が判定開始条件を満たしてからの判定期間において、車輪加速度の極大値又は極小値に関連する情報を含む特定情報に基づいて、路面凹凸の種類を判定し、地図データに対して設定された複数のエリアのうち、自車両の位置に基づいて、路面凹凸の種類の判定結果に対応する対応エリアを選択し、対応エリアごとに且つ路面凹凸の種類ごとに判定回数を積算し、積算結果を車外サーバ8に送信する及び/又は記憶装置42に記憶させる。
【選択図】図1
特許請求の範囲
【請求項1】
自車両の位置を検出する位置検出装置と、
前記自車両の車輪速度を検出する車輪速度センサと、
記憶装置を有し、前記車輪速度から車輪加速度を演算する車載コンピュータと、
を備え、
前記車載コンピュータは、
前記車輪加速度が判定開始条件を満たしてからの判定期間において、前記車輪加速度の極大値及び/又は極小値に関連する情報を含む特定情報に基づいて、路面凹凸の種類を判定し、
地図データに対して設定された複数のエリアのうち、前記自車両の位置に基づいて、路面凹凸の種類の判定結果に対応する対応エリアを選択し、
前記対応エリアごとに且つ路面凹凸の種類ごとに判定回数を積算し、積算結果を車外サーバに送信する又は前記記憶装置に記憶させる、
路面状態検出システム。
続きを表示(約 760 文字)
【請求項2】
前記特定情報は、前記車輪加速度が最大値となった時刻である最大取得時刻と、前記車輪加速度が最小値となった時刻である最小取得時刻とを含み、
前記車載コンピュータは、前記最大取得時刻と前記最小取得時刻との前後関係に基づいて、判定対象の路面凹凸が凹部であるか凸部であるかを判定する、
請求項1に記載の路面状態検出システム。
【請求項3】
前記車輪速度センサとして、左車輪に対して設けられ前記左車輪の前記車輪速度を検出する左車輪速度センサと、前記左車輪と左右方向に対向して配置された右車輪に対して設けられ前記右車輪の前記車輪速度を検出する右車輪速度センサと、を備え、
前記車載コンピュータは、
前記左車輪速度センサの検出値に基づいて前記左車輪の前記車輪加速度である左車輪加速度を演算し、前記右車輪速度センサの検出値に基づいて前記右車輪の前記車輪加速度である右車輪加速度を演算し、
前記特定情報として、前記左車輪加速度の最大値に関連する情報及び前記右車輪加速度の最大値に関連する情報に基づいて、判定対象の路面凹凸が路面の補修対象でない特定段差であるか否かを判定する、
請求項1又は2に記載の路面状態検出システム。
【請求項4】
前記車載コンピュータは、
前記判定期間において、所定範囲内の値である極大値及び/又は極小値を所定数検出した場合、判定対象の路面凹凸がひび割れであると判定する、
請求項1又は2に記載の路面状態検出システム。
【請求項5】
複数の車両のそれぞれに前記位置検出装置、前記車輪速度センサ、及び前記車載コンピュータが搭載されている、
請求項1又は2に記載の路面状態検出システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、路面状態検出システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
車輪速度センサの検出値を用いて路面の凹凸状態を判定する装置は、例えば特開昭60-596号公報に記載されている。この装置は、車輪速度センサの検出値から車輪加速度を演算し、分散や、最大値と最小値との差等に基づいて、路面の凹凸状態を判定する。
【先行技術文献】
【特許文献】
【0003】
特開昭60-596号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の路面状態検出装置では、装置のユーザは、路面のどのエリアにどのような凹凸がどの程度あるかを知ることが困難である。つまり、従来の路面状態検出装置では、路面凹凸の種類が判定されておらず、且つエリアごとに判定回数が積算されていない。従来の路面状態検出装置では、路面の補修計画の観点で改良の余地がある。
【0005】
本発明の目的は、路面の補修計画の検討に役立つデータを収集することができる路面状態検出システムを提供することである。
【課題を解決するための手段】
【0006】
本発明の路面状態検出システムは、自車両の位置を検出する位置検出装置と、前記自車両の車輪速度を検出する車輪速度センサと、前記車輪速度から車輪加速度を演算する車載コンピュータと、を備えている。前記車載コンピュータは、前記車輪加速度が判定開始条件を満たしてからの判定期間において、前記車輪加速度の極大値及び/又は極小値に関連する情報を含む特定情報に基づいて、路面凹凸の種類を判定する。前記車載コンピュータは、地図データに対して設定された複数のエリアのうち、前記自車両の位置に基づいて、路面凹凸の種類の判定結果に対応する対応エリアを選択する。前記車載コンピュータは、前記対応エリアごとに且つ路面凹凸の種類ごとに判定回数を積算し、積算結果を車外サーバに送信する又は前記記憶装置に記憶させる。
【発明の効果】
【0007】
本発明によれば、車輪加速度の極大値及び/又は極小値に関連する情報(例えば値そのもの又は取得時刻等)を含む特定情報に基づいて、路面凹凸の種類が判定される。例えば、車輪加速度が最大値となった時刻と車輪加速度が最小値になった時刻とに基づいて、路面凹凸が凹部であるか凸部であるかを判定することができる。車載コンピュータは、検出した路面凹凸について、地図上のエリアと路面凹凸の種類とを分類項目として、判定回数(検出回数)を記憶装置に記憶させる又は車外サーバ(外部サーバ)に送信する。これにより、ユーザは、記憶装置又は車外サーバの記憶内容を確認すること、道路のどのエリアにどの種類の路面凹凸がどれだけあるかを容易に把握することができる。この情報は、路面の補修計画を検討する上で、有益な情報となる。このように、本発明によれば、路面の補修計画の検討に役立つデータを収集することができる。
【図面の簡単な説明】
【0008】
本実施形態の路面状態検出システムの構成図である。
本実施形態の制御の流れを示すフローチャートである。
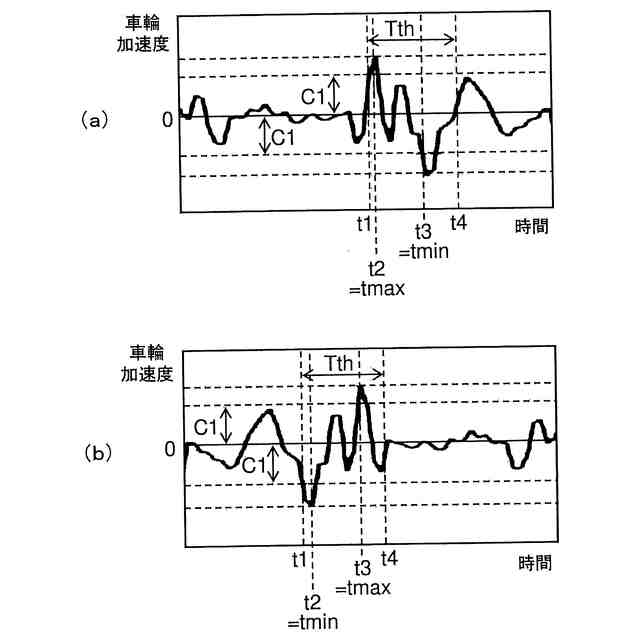
(a)は車輪が凸部を通過した際の車輪加速度のタイムチャートであり、(b)は車輪が凹部を通過した際の車輪加速度のタイムチャートである。
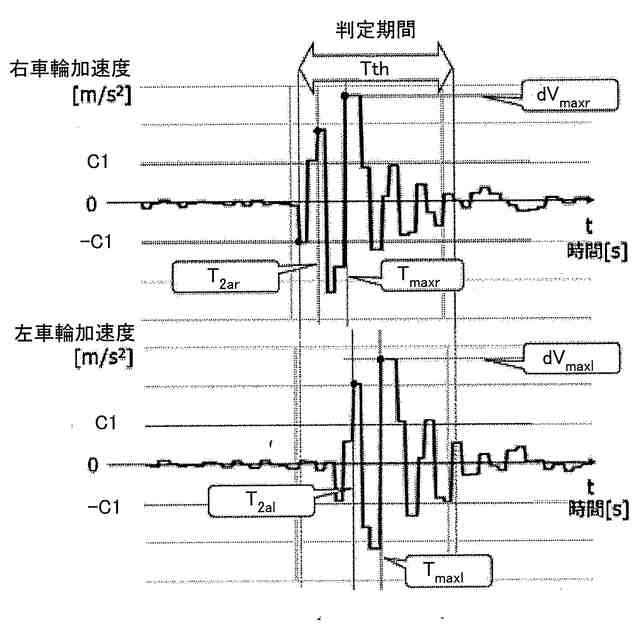
本実施形態の各車輪の車輪加速度の変動例を示すタイムチャートであり、最大値と第2極大値に着目したグラフである。
本実施形態の各車輪の車輪加速度の変動例を示すタイムチャートであり、最小値と第2極小値に着目したグラフである。
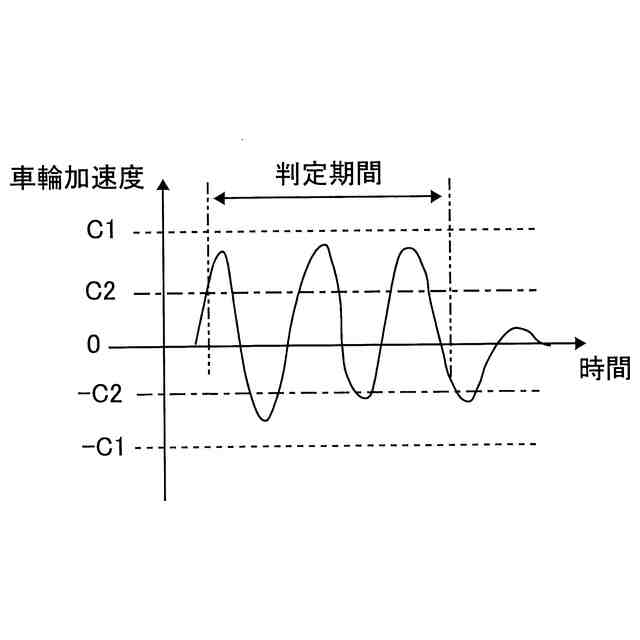
車輪がひび割れを通過した際の車輪加速度のタイムチャート(概念図)である。
【発明を実施するための形態】
【0009】
以下、本発明を実施するための形態として、本発明の一実施形態である路面状態検出システム1を、図を参照しつつ詳しく説明する。なお、本発明は、下記実施例の他、当業者の知識に基づいて種々の変更、改良を施した種々の形態で実施することができる。
【0010】
本実施形態の路面状態検出システム1は、図1に示すように、左車輪速度センサ(「車輪速度センサ」に相当する)2と、右車輪速度センサ(「車輪速度センサ」に相当する)3と、車載コンピュータ4と、位置検出装置5と、を備えている。左車輪速度センサ2は、左車輪91に対して設けられ、左車輪91の車輪速度を検出する。右車輪速度センサ3は、左車輪91と左右方向に対向して配置された右車輪92に対して設けられ、右車輪92の車輪速度を検出する。左車輪91と右車輪92とは、車両前後方向において同じ位置に配置されている。つまり、本実施形態のように、車両が左右の前輪と左右の後輪を持つ4輪車である場合、左車輪91が左前輪であれば右車輪92は右前輪であり、左車輪91が左後輪であれば右車輪92は右後輪である。本説明では、左車輪91が左前輪であり、右車輪92が右前輪である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る




 特許ウォッチ
特許ウォッチ