TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025074403
公報種別
公開特許公報(A)
公開日
2025-05-14
出願番号
2023185176
出願日
2023-10-30
発明の名称
点検システム、点検方法、および点検プログラム
出願人
三菱電機株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
H04N
7/18 20060101AFI20250507BHJP(電気通信技術)
要約
【課題】カメラ装置により点検対象を撮影して近接目視相当の点検を実現する。
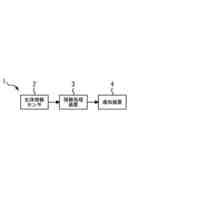
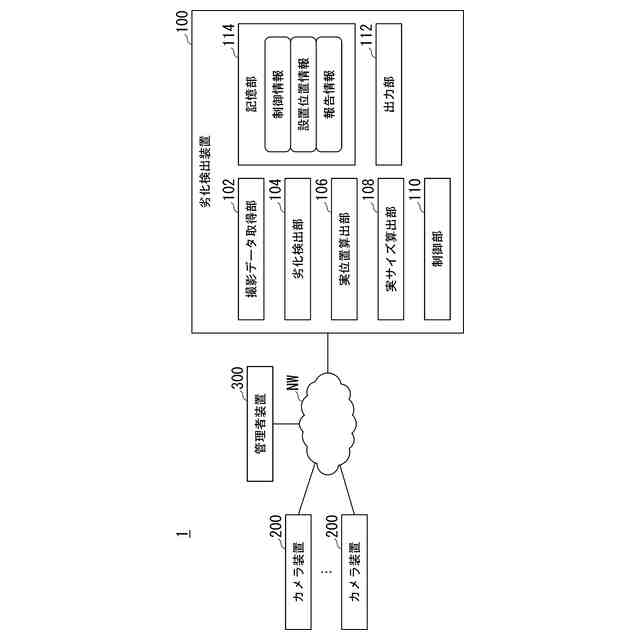
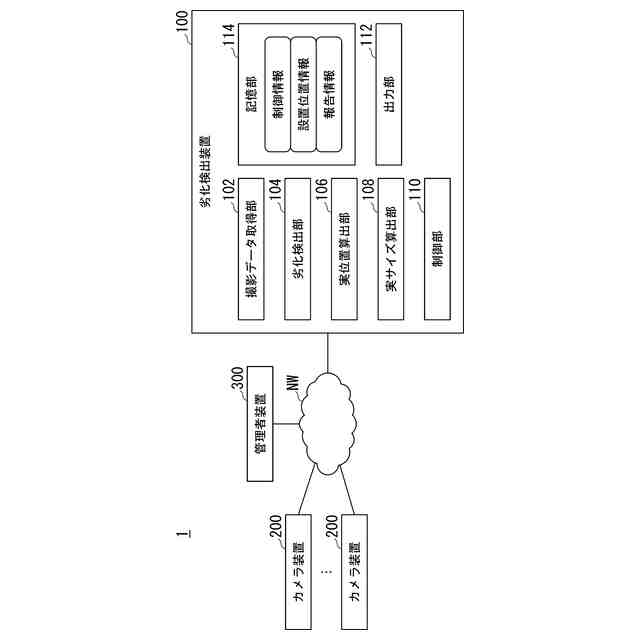
【解決手段】本開示の一態様は、撮像素子を含むカメラ装置により点検対象を撮影した撮影データを取得する撮影データ取得部と、撮影データ内の点検対象が劣化している劣化領域を検出する劣化検出部と、劣化領域の撮影データ内位置、カメラ装置の設置位置情報、およびカメラ装置の旋回制御情報に基づいて、劣化領域の実位置を算出する実位置算出部と、カメラ装置の設置位置情報から劣化領域の実位置までの距離、撮像素子のサイズ、およびカメラ装置のズーム制御情報に基づいて、劣化領域の実サイズを算出する実サイズ算出部と、実位置算出部により算出された劣化領域の実位置および実サイズ算出部により算出された実サイズを含む情報を出力する出力部と、を備える点検システムである。
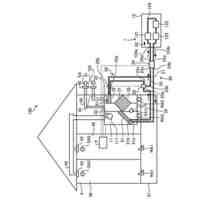
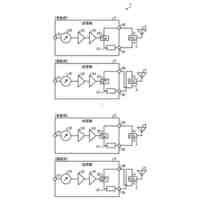
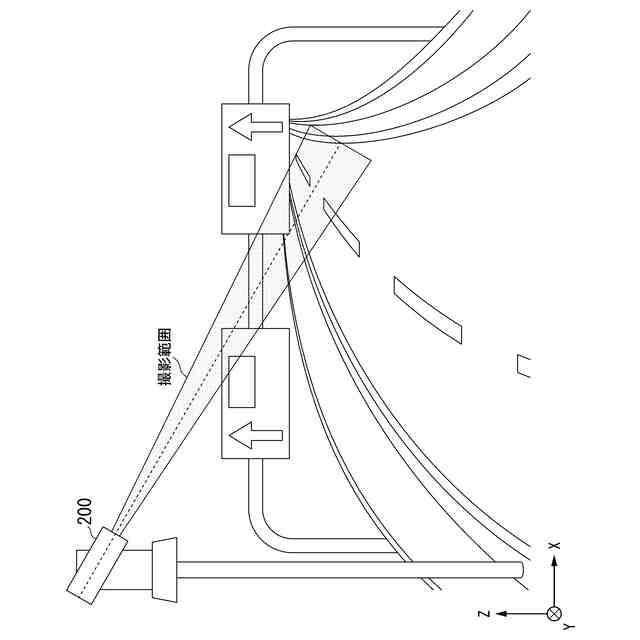
【選択図】図1
特許請求の範囲
【請求項1】
撮像素子を含むカメラ装置により点検対象を撮影した撮影データを取得する撮影データ取得部と、
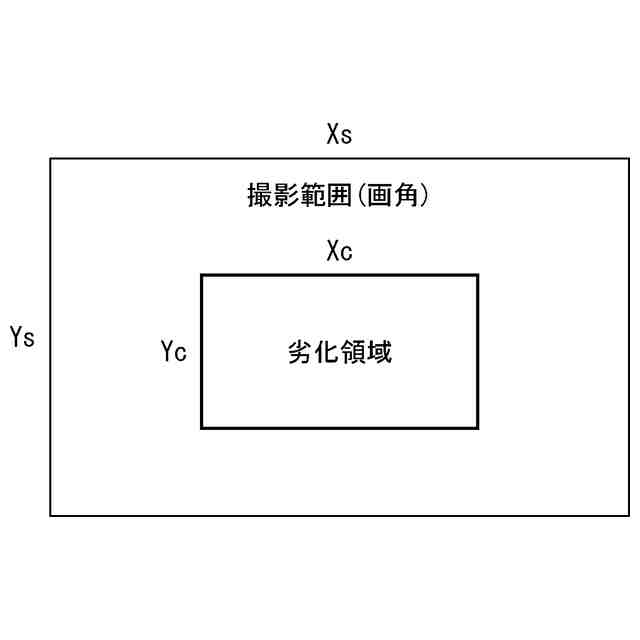
前記撮影データ内の点検対象が劣化している劣化領域を検出する劣化検出部と、
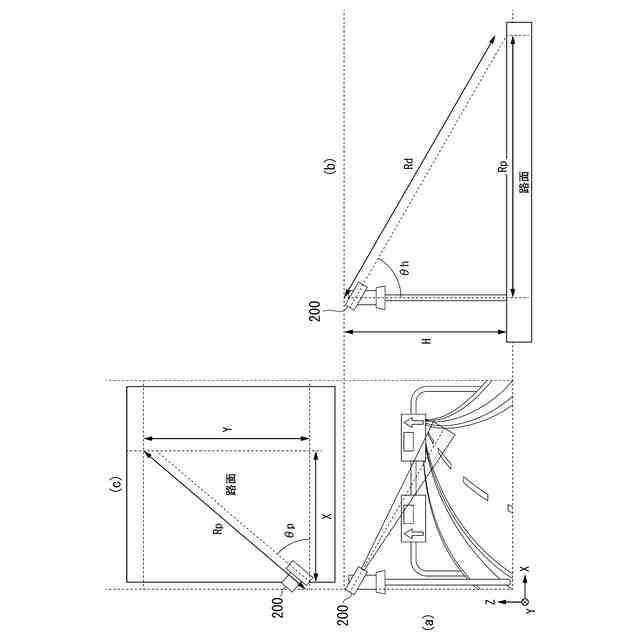
前記劣化領域の撮影データ内位置、前記カメラ装置の設置位置情報、および前記カメラ装置の旋回制御情報に基づいて、前記劣化領域の実位置を算出する実位置算出部と、
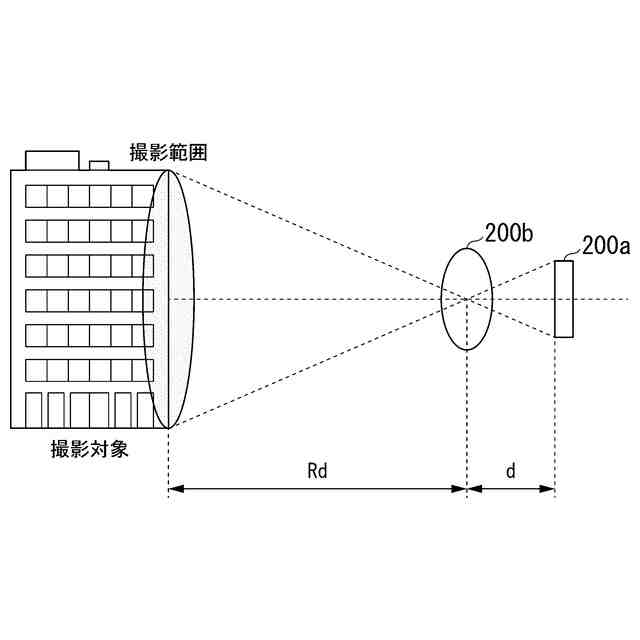
前記カメラ装置の設置位置情報から前記劣化領域の実位置までの距離、前記撮像素子のサイズ、および前記カメラ装置のズーム制御情報に基づいて、前記劣化領域の実サイズを算出する実サイズ算出部と、
前記実位置算出部により算出された前記劣化領域の実位置および前記実サイズ算出部により算出された実サイズを含む情報を出力する出力部と、
を備える点検システム。
続きを表示(約 1,400 文字)
【請求項2】
前記カメラ装置の撮影範囲の中心位置が前記劣化領域の中心位置に近づくように旋回制御情報を調整し、調整した旋回制御情報に基づいて前記カメラ装置を制御する制御部を備え、
前記実位置算出部は、調整した旋回制御情報に基づいて劣化領域の位置を再計算する、請求項1に記載の点検システム。
【請求項3】
前記点検対象の構造データに基づいて前記点検対象の高さ情報を取得する高さ情報取得部を備え、
前記実サイズ算出部は、前記高さ情報取得部により取得された高さ情報に基づいて前記カメラ装置の設置位置情報から前記劣化領域の実位置までの距離を算出し、算出した距離に基づいて前記劣化領域の実サイズを算出する、
請求項1に記載の点検システム。
【請求項4】
前記カメラ装置から前記劣化領域までの距離を取得する距離取得部を備え、
前記実サイズ算出部は、前記距離取得部により取得された距離に基づいて前記劣化領域の実サイズを算出する、
請求項1に記載の点検システム。
【請求項5】
前記カメラ装置の旋回制御情報およびズーム制御情報を含む制御プリセット情報を記憶する記憶部と、
前記記憶部に記憶された旋回制御情報およびズーム制御情報に基づいて前記カメラ装置の旋回およびズームを制御する制御部と、
を備える、請求項1に記載の点検システム。
【請求項6】
前記制御プリセット情報は、一定のズーム倍率に制御するズーム制御情報、および前記一定のズーム倍率に応じた撮影範囲で点検エリアを分割した分割エリアごとに検査するための旋回制御情報を含み、
前記制御部は、前記制御プリセット情報に基づいて前記カメラ装置を制御し、
前記劣化検出部は、前記分割エリアごとに劣化領域を検出する、
請求項5に記載の点検システム。
【請求項7】
前記制御プリセット情報は、一定のズーム倍率に制御するズーム制御情報、および前記一定のズーム倍率に応じた撮影範囲を点検エリア内で移動させる旋回制御情報を含み、
前記制御部は、前記制御プリセット情報に基づいて前記カメラ装置を制御し、
前記劣化検出部は、移動する撮影範囲で撮影された撮影データ内の劣化領域を検出する、
請求項5に記載の点検システム。
【請求項8】
前記制御プリセット情報は、前記実サイズ算出部により算出された劣化領域の実サイズ、および、前記カメラ装置と前記劣化領域との距離に応じて決定されたズーム倍率とするズーム制御情報を含む、請求項5に記載の点検システム。
【請求項9】
前記制御プリセット情報は、定期的に点検を行うための点検日時情報、旋回制御情報、およびズーム制御情報を含み、
前記制御部は、前記点検日時情報に基づいて点検日時が到来したことに応じ、前記旋回制御情報および前記ズーム制御情報に基づいて前記カメラ装置を制御し、
点検日時に対応させて点検結果、パン制御情報、チルト制御情報、およびズーム制御情報を含む情報を記憶部に蓄積させる、
請求項5に記載の点検システム。
【請求項10】
前記制御部は、点検対象の周囲の環境情報または障害物情報に基づいて前記カメラ装置に前記撮影データを撮影させるタイミングを判定するタイミング判定部を備える、請求項5に記載の点検システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、点検システム、点検方法、および点検プログラムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
道路や設備の点検業務は、例えば5年以内の周期で近接目視検査を行うことが求められていたが、人口の減少のために近接目視点検を継続することが困難になることが予測されており、点検業務の効率化が求められている。さらに、インフラ補修および更新の効率化のため、点検頻度を上げることで適切なタイミングでの補修および更新を行うことが求められている。
点検業務の効率化に向けて、国土交通省における「道路トンネル定期点検要領」に記載された状態の把握が「健全性の診断の根拠となる状態の把握は、近接目視により行うことを基本とする。」と記載されているのに対して、法令運用上の留意事項として「定期点検を行う者は、健全性の診断の根拠となる道路トンネルの現在の状態を、近接目視により把握するか、または、自らの近接目視によるときと同等の健全性の診断を行うことができる情報が得られると判断した方法により把握しなければならない。」と記載されており、近接目視以外の新たな点検方法による点検業務の効率化が後押されている。
【0003】
特許文献1に記載されたデータ収集判定システムは、ドローンなどの無人飛行体によってデータ収集装置を実現し、撮像画像を判定装置に送信し判定装置から対象物に対する判定結果を受信して出力し、判定結果に対する評価を示す確認結果を確認者による操作に応じて入力している。
特許文献2には、消防や防災などに用いられている高所カメラにて撮影している範囲について旋回ズームのカメラ制御情報から撮影位置を特定し、地図上のどこを撮影しているかを表示することが記載されている。これによりカメラ映像によって確認された災害など事象が地図上のどこの位置で発生しているかを確認させることができる。
【先行技術文献】
【特許文献】
【0004】
特開2021-144518号公報
特開平08-065551号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
道路等を効率的に点検するために特許文献1に記載されたドローンや、点検用カメラ装置を搭載した特殊車両を利用しても、高頻度に点検を行うことは困難である。ドローンを用いた場合、道路上空を飛行するために交通規制が必要となり、さらには、天候によってはドローンが飛行できない場合がある。特殊車両を用いた場合、台数に限りがあるために全国に広がる道路網を高頻度に点検することは困難である。
【0006】
特許文献2に記載されたシステムは、災害などの場所を確認するために用いることができるが、道路等の劣化を検出する用途には用いることができない。また、高所カメラの撮影範囲に応じた物体の大きさを算出しても、映像内の物体の大きさを正確に検出することができない。
【0007】
本開示は、このような事情に鑑みてなされたものであり、カメラ装置により点検対象を撮影して近接目視相当の点検を実現することができる点検システム、点検方法、および点検プログラムを提供することを目的としている。
【課題を解決するための手段】
【0008】
本開示は上述した課題を解決するためになされたもので、本開示の一態様は、撮像素子を含むカメラ装置により点検対象を撮影した撮影データを取得する撮影データ取得部と、前記撮影データ内の点検対象が劣化している劣化領域を検出する劣化検出部と、前記劣化領域の撮影データ内位置、前記カメラ装置の設置位置情報、および前記カメラ装置の旋回制御情報に基づいて、前記劣化領域の実位置を算出する実位置算出部と、前記カメラ装置の設置位置情報から前記劣化領域の実位置までの距離、前記撮像素子のサイズ、および前記カメラ装置のズーム制御情報に基づいて、前記劣化領域の実サイズを算出する実サイズ算出部と、前記実位置算出部により算出された前記劣化領域の実位置および前記実サイズ算出部により算出された実サイズを含む情報を出力する出力部と、を備える点検システムである。
【0009】
本開示の他の態様は、情報処理装置が、撮像素子を含むカメラ装置により点検対象を撮影した撮影データを取得するステップと、前記情報処理装置が、前記撮影データ内の点検対象が劣化している劣化領域を検出するステップと、前記情報処理装置が、前記劣化領域の撮影データ内位置、前記カメラ装置の設置位置情報、および前記カメラ装置の旋回制御情報に基づいて、前記劣化領域の実位置を算出するステップと、前記情報処理装置が、前記カメラ装置の設置位置情報から前記劣化領域の実位置までの距離、前記撮像素子のサイズ、および前記カメラ装置のズーム制御情報に基づいて、前記劣化領域の実サイズを算出するステップと、前記情報処理装置が、前記劣化領域の実位置および実サイズを含む情報を出力するステップと、を含む、点検方法である。
【0010】
本開示の他の態様は、情報処理装置のコンピュータに、撮像素子を含むカメラ装置により点検対象を撮影した撮影データを取得するステップ、前記撮影データ内の点検対象が劣化している劣化領域を検出するステップ、前記劣化領域の撮影データ内位置、前記カメラ装置の設置位置情報、および前記カメラ装置の旋回制御情報に基づいて、前記劣化領域の実位置を算出するステップ、前記カメラ装置の設置位置情報から前記劣化領域の実位置までの距離、前記撮像素子のサイズ、および前記カメラ装置のズーム制御情報に基づいて、前記劣化領域の実サイズを算出するステップ、および前記劣化領域の実位置および実サイズを含む情報を出力するステップを実行させる、プログラムである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
送風機
12日前
三菱電機株式会社
発光装置
20日前
三菱電機株式会社
照明器具
1日前
三菱電機株式会社
放電装置
20日前
三菱電機株式会社
照明器具
13日前
三菱電機株式会社
電子機器
5日前
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
半導体装置
28日前
三菱電機株式会社
半導体装置
27日前
三菱電機株式会社
半導体装置
21日前
三菱電機株式会社
半導体装置
21日前
三菱電機株式会社
光通信装置
20日前
三菱電機株式会社
加熱調理器
14日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
半導体装置
1日前
三菱電機株式会社
半導体装置
1日前
三菱電機株式会社
空調システム
12日前
三菱電機株式会社
給湯システム
2日前
三菱電機株式会社
電力変換装置
2日前
三菱電機株式会社
照明システム
今日
三菱電機株式会社
半導体製造装置
1か月前
三菱電機株式会社
見守りシステム
1日前
三菱電機株式会社
半導体モジュール
27日前
三菱電機株式会社
自動運転システム
2日前
三菱電機株式会社
自己位置推定装置
1日前
三菱電機株式会社
換気空調システム
1か月前
三菱電機株式会社
換気空調システム
1か月前
三菱電機株式会社
燃料電池システム
1日前
三菱電機株式会社
換気空調システム
1か月前
三菱電機株式会社
保護リレーシステム
27日前
三菱電機株式会社
アレーアンテナ装置
13日前
三菱電機株式会社
手持ち式電気掃除機
13日前
三菱電機株式会社
モータ及び送風装置
12日前
三菱電機株式会社
移動体制御システム
2日前
三菱電機株式会社
水位変化検出システム
16日前
三菱電機株式会社
移載装置及び吸着方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ